") 當(dāng)車載攝像頭使用AI時圖像傳感器遇到哪些挑戰(zhàn)
當(dāng)車載攝像頭使用AI時圖像傳感器遇到哪些挑戰(zhàn)
“車載攝像頭”本身是指代并不算明確的詞,因為如今的汽車搭載越來越多的攝像頭,而不同作用的攝像頭,其規(guī)格和標(biāo)準(zhǔn)又是不盡相同的。
Yole Developpement曾將車載攝像頭大致分成了ADAS攝像頭、視覺攝像頭(如環(huán)視、前視、盲點監(jiān)測等)、車艙內(nèi)攝像頭(如駕駛員監(jiān)測、手勢UI、存在檢測等)、CMS(Camera Mirror System)、AV自動駕駛(前視、環(huán)視攝像頭等)。
這個分類似乎是有些交疊的,但大方向上車內(nèi)與車外的攝像頭有差別,而讓人看的攝像頭與純粹用于數(shù)據(jù)分析的攝像頭又有差別。打個比方,手機攝像頭拍的照片要求拍得好看,是要發(fā)朋友圈的;而車載攝像頭要以“拍得到”為最高準(zhǔn)則。
汽車上的攝像頭按照是否給人看,也可以分成兩大類。文首提到視覺攝像頭即視覺應(yīng)用是需要給人看的,像是電子后視鏡、某些環(huán)視系統(tǒng)。還有一類是計算機視覺(機器視覺),應(yīng)用于自動駕駛、自動泊車,這種攝像頭所攝畫面價值更不在于給人看,而是做數(shù)據(jù)分析。
本文要探討的是后一類車載攝像頭(以及與智慧交通相關(guān)話題的攝像頭)。ADAS與自動駕駛方向的許多攝像頭都屬于這一類,在這種情況下以人的視覺友好性為目的的圖像處理,就沒有價值了——計算機視覺(CV)就是指,以圖像或視頻為輸入,輸出的則是距離、色彩、形狀、對象分類、語義分割等屬性信息。計算機視覺所期望達成的是理解看到的世界(雖然當(dāng)前的計算攝影實則也有一部分這種屬性)。
自2012年機器學(xué)習(xí)成為新的熱門,AI如今的發(fā)展變得如火如荼。機器學(xué)習(xí)是計算機視覺可應(yīng)用的一種解決問題的方法。越來越多的神經(jīng)網(wǎng)絡(luò)把一些傳統(tǒng)的計算機視覺方法按在地上摩擦。在計算機視覺領(lǐng)域,AI成為一個不得不談的話題:計算機視覺因此能夠?qū)崿F(xiàn)更快速和準(zhǔn)確的圖像分類、目標(biāo)檢測、目標(biāo)跟蹤、語義分割等。
所以本文嘗試談一談當(dāng)車載攝像頭(主要是ADAS與AV相關(guān)的攝像頭)應(yīng)用于計算機視覺時,圖像傳感器有了哪些新的發(fā)展方向和技術(shù)要求。而既然計算機視覺如今與AI又有著這么大的關(guān)聯(lián),那么亦可理解為車載攝像頭采用AI技術(shù)時,圖像傳感器有了哪些新的發(fā)展。
車規(guī)級圖像質(zhì)量規(guī)范
越來越多的圖像傳感器制造商,都愈發(fā)注重在AI時代下的發(fā)展。比較具有代表性的是安森美、思特威、意法半導(dǎo)體等圖像傳感器廠商普遍在宣傳自家的全局曝光CMOS圖像傳感器,并且將其作為機器視覺的必要技術(shù)。因為在拍攝高速運動的對象時,唯有全局快門(Global Shutter)才能確保將對象拍清楚,才能實現(xiàn)準(zhǔn)確的計算機視覺分析。
雖然這些并非全部面向車載攝像頭,但也能管中窺豹地發(fā)現(xiàn)ADAS/AV攝像頭對于圖像傳感器而言意味著什么。今年的中國IC領(lǐng)袖峰會上,思特威副總經(jīng)理歐陽堅發(fā)表題為“以CMOS圖像傳感器創(chuàng)機器智視芯格局”的主題演講,其中就提到了包括全局快門在內(nèi)的多項新技術(shù)。
不過廠商從個體技術(shù)發(fā)展角度來談車載攝像頭的圖像傳感器技術(shù)要求,恐怕不夠全面。從更全面的角度來理解這個問題,應(yīng)當(dāng)看一看標(biāo)準(zhǔn)和規(guī)范。市面上已有的標(biāo)準(zhǔn)似乎還是很多的,不過當(dāng)前比較知名的汽車相關(guān)的圖像質(zhì)量規(guī)范,應(yīng)該是IEEE P2020與ISO16505。從中應(yīng)該可以部分發(fā)現(xiàn),如今的車載圖像傳感器,到底有哪些技術(shù)要求。
ISO16505針對的主要是人眼視覺相關(guān)系統(tǒng)質(zhì)量的規(guī)范,比如說電子后視鏡、環(huán)視系統(tǒng)等;不對人眼可見的機器視覺部分是非強制的。很早之前,Imatest創(chuàng)始人曾公開嘲笑過ISO16505,認(rèn)為這是不熟悉圖像質(zhì)量測試的人開發(fā)的(雖然這可能與Imatest實際參與IEEE P2020有關(guān))。那么我們就來看看P2020。
IEEE P2020對于人眼視覺和機器視覺應(yīng)用都有對應(yīng)的規(guī)范,但這類規(guī)范推進的速度似乎還是比較緩慢。2018年9月發(fā)布的IEEE P2020 Automotive Imaging White Paper白皮書提到汽車攝像頭圖像質(zhì)量尚未被完全定義好,諸多關(guān)鍵指標(biāo)不明確;我們在IEEE官網(wǎng)看到,P2020目前似乎仍停留在這一步。不過這份白皮書列舉了現(xiàn)有的一些圖像質(zhì)量規(guī)范,與車用攝像頭實際需求之間存在的差異。這其中的一部分對于圖像傳感器(以及整個攝像頭系統(tǒng))而言就提出了新的思考,相比ISO16505也多出高動態(tài)范圍、veiling glare等的測試。
其中包括Tonal Response(動態(tài)范圍、SNR、低光照表現(xiàn)、Chroma shading)、Spatial Response(解析力、銳度、景深、紋理、運動模糊)、Temporal Response(Flicker/頻閃)、Spectral Response(光譜量子效率、演色性、交通相關(guān)色彩區(qū)分性)、光學(xué)偽像(鏡頭眩光、鬼影、veiling glare/雜光、鏡頭色差、雜散光)、噪聲、不均勻性(PRNU等)、熱性能(高溫下的SNR、分辨率等的變化)、功能表現(xiàn)(自動曝光、自動白平衡控制)、系統(tǒng)(多攝像頭系統(tǒng))、其他(鏡頭畸變、HDR多重曝光等)。
與此同時,P2020明確包含7個工作組,還是多少能夠看到未來的趨勢。與本文探討的話題比較相關(guān)的有幾個。其一是工作組1研究LED flicker standards,也就是LED頻閃。歐陽堅在此前的演講中也提過,“交通領(lǐng)域會遇到LED燈,紅綠燈時高頻閃爍的LED燈,如果不對高頻閃爍的頻率做處理,抓拍的信息就是殘缺不全的。”人眼對于頻率高于90Hz的閃爍不會有所察覺,但對圖像傳感器而言,曝光時長與LED光源調(diào)制信號產(chǎn)生一些錯位時,就產(chǎn)生了頻閃信息捕捉不全的問題。
這一點實則也是思特威、OmniVision這類圖像傳感器廠商研究的重要課題之一,雖然可能并非單純面向車載領(lǐng)域。而P2020工作組1針對這種頻閃,所做的工作包括闡明flicker產(chǎn)生的原因和細(xì)節(jié);列舉flicker出現(xiàn)的情況和潛在影響;定義flicker的測試方法和關(guān)鍵測試指標(biāo);定義flicker對人類視覺/機器視覺影響的客觀測試指標(biāo)。
其二,P2020明確的工作組3研究針對計算機視覺的圖像質(zhì)量(Image quality for computer vision)。其方向主要更偏系統(tǒng)級測試。相比EMVA1288這種更偏單個組件的測試,系統(tǒng)級測試對于實際應(yīng)用是更有價值的。前面提到許多圖像質(zhì)量規(guī)范,比如其中的一些光學(xué)偽像、多攝像頭系統(tǒng)就不只是攝像頭乃至后端計算,其中一個組件的問題。
車載圖像傳感器有哪些技術(shù)需求?
要將所有標(biāo)準(zhǔn)規(guī)范中提及的測試項悉數(shù)列出還是不現(xiàn)實的,所以我們根據(jù)圖像傳感器企業(yè)目前著力的宣傳點、新標(biāo)準(zhǔn)中針對車載攝像頭新出現(xiàn)的部分來嘗試總結(jié)ADAS/AV機器視覺對于圖像傳感器而言,提出了哪些要求,又有哪些新的發(fā)展方向。這里只討論圖像質(zhì)量,不探討車規(guī)級本身對于電子元器件在溫度、天氣等方面的嚴(yán)苛要求。
2018年,Smithers曾撰寫過一份題為Autonomous Vehicle Image Sensors to 2023 – a State of the Art Report(到2023年自動駕駛汽車圖像傳感器 – 前沿報告)的報告。除了未來全自動駕駛將變得更依托于機器視覺,面向人類視覺的圖像增強要求越來越低之外,還提到了幾個趨勢:
(1)達到140dB的動態(tài)范圍,800萬像素單目分辨率、200萬像素立體視覺相機,超過60fps的幀率,高靈敏度;
(2)在0.001lux照度下,曝光時間不大于1/30秒的情況下,信噪比大于1;
(3)HDR高動態(tài)范圍的同時,要求運動偽像更少;
(4)LED flickering問題消除。
這幾點實則都不出意外,也是當(dāng)代圖像傳感器廠商普遍在努力的方向,包括圖像傳感器自身的高動態(tài)范圍、更高的分辨率、幀率,以及低照度下的靈敏度和低噪聲。雖然報告中列舉的部分參數(shù)還有些超前,現(xiàn)在的圖像傳感器制造商在這些目標(biāo)的實現(xiàn)上,卻都有自己的殺手锏。比如針對低光照環(huán)境,不少廠商在變革像素結(jié)構(gòu),同時開始采用雙增益轉(zhuǎn)換來兼顧白天和夜間場景。
這里比較值得一提的是趨勢中提到的后兩點。首先是HDR高動態(tài)范圍,以及要求更低的運動偽像。其中HDR是車載攝像頭所需實現(xiàn)的基本特性。畢竟當(dāng)場景光比很大時,如果攝像頭拍攝的畫面有部分區(qū)域過曝或欠曝,計算機視覺分析工作就無法拿到對應(yīng)的數(shù)據(jù)。從圖像傳感器的角度,實現(xiàn)HDR有多重曝光、雙增益、大小像素分離,以及提高像素阱容等方法。
時域多重曝光的HDR方案在成像領(lǐng)域很常見,但在ADAS/AV方向上的適用度正逐步降低——因為車載攝像頭要求畫面不能有運動偽像,且必須抑制LED頻閃。所以像思特威這樣的廠商,開始傾向于采用單幀空間域多曝光的方案,典型的方法像是隔行多曝光:圖像傳感器上每兩行為長曝光,兩行為短曝光。ISSCC曾收錄過思特威有關(guān)單幀HDR技術(shù)的論文。圖1,來源:思特威
另外抑制運動偽像一個重點就是全局曝光(或全局快門)。全局曝光也是現(xiàn)在幾乎所有圖像傳感器制造商都在爭奪的技術(shù)高地。傳統(tǒng)卷簾快門(rolling shutter)因為采用逐行曝光的方式,拍攝高速運動物體時會有果凍效應(yīng)。全局快門是讓所有像素同時開始和結(jié)束曝光,也就規(guī)避了這種形式的影像失真。
索尼的Pregius全局快門傳感器比較知名——ISSCC曾收錄過索尼一篇每個像素都應(yīng)用獨立ADC的論文(像素級互聯(lián)),這是快速讀出實現(xiàn)全局快門的技術(shù)之一;OmniVision也有類似的技術(shù)介紹。索尼今年發(fā)布的第四代全局快門圖像傳感器終于也用上了BSI背照式技術(shù),減小了像素尺寸。此前思特威在宣傳中也提到,思特威是“全球為數(shù)不多率先將全局曝光和BSI技術(shù)融合的公司之一”。圖2,來源:IEEE P2020 Automotive Imaging White Paper
至于前文就提到的LED頻閃消除(圖2),這兩年思特威、OmniVision都在不遺余力地宣傳自家的圖像傳感器LED閃爍抑制技術(shù)。畢竟在自動駕駛、智慧交通領(lǐng)域,LED頻閃導(dǎo)致攝像頭捕捉到的交通標(biāo)志、紅綠燈讀秒信息不全,會導(dǎo)致后端AI系統(tǒng)的誤判。
一般來說,LED頻閃抑制可以通過保持LED頻閃與圖像傳感器快門同步的方式,問題是不同LED規(guī)格不一致,所以這種理論上的方案是不可行的。另外也可以通過HDR,在捕捉LED燈的畫面時,確保能夠用更長的曝光時間來捕捉更全面的信息。圖像傳感器廠商應(yīng)用的都是這個大思路,雖然在具體實施上存在差別,例如OmniVision應(yīng)用的是大小分離像素。
機器視覺感知的未來
從更偏系統(tǒng)的角度來看,大概還有一些技術(shù)趨勢是值得一談的。比如在傳感器角度,車載領(lǐng)域各種傳感器的融合會是個趨勢,不僅是多攝系統(tǒng),還可能是不同類別視覺傳感器的融合,比如LiDAR與攝像頭融合的傳感器;還有RGB-IR傳感器,為圖像傳感器融入紅外感知能力(如果把傳感器探討范圍擴展到IR傳感器,可能還涉及到近紅外響應(yīng)增強等技術(shù)趨勢,SWIR紅外攝像頭等)。
從整個成像/視覺系統(tǒng)的角度看,圖像傳感器將融合部分邊緣算力,可能也會成為一個趨勢。比如索尼就將AI邊緣計算與圖像傳感器做了結(jié)合(IMX500);SK hynix去年也在新聞稿中提到,基于先進半導(dǎo)體制造工藝,堆棧式傳感器中,將一個簡單的AI硬件引擎加入到傳感器下層的ISP中,已經(jīng)是可行的了……雖然這些暫時還不是面向汽車市場的。
思特威前兩年推出AISENS傳感器芯片平臺,就是“感知與計算一體的通用AI傳感器芯片平臺”,此前思特威也提及以3D堆疊的方式將數(shù)據(jù)處理die與傳感器die封裝到一起。這個平臺如今似乎正趨于進一步的商用化。
去年Yole Developpement發(fā)布了一份題為《2019圖像信號處理器與視覺處理器市場與技術(shù)趨勢》的報告。該報告明確提到:“AI徹底改變了視覺系統(tǒng)中的硬件,對整個行業(yè)都造成了影響。”“圖像分析增加了很多價值。圖像傳感器供應(yīng)商們開始對將軟件層集成到系統(tǒng)中感興趣。如今圖像傳感器必須跳出單純的捕獲圖像這一能力之外,再對圖像做分析。”
2019年,EE Times曾發(fā)表過一篇題為ADAS: Key Trends on ‘Perception’的文章。這篇文章從更偏系統(tǒng)的角度談了ADAS車載感知系統(tǒng)的發(fā)展趨勢,建議閱讀。
最后想簡單談?wù)勔訮rophesee為代表的基于事件的視覺傳感器技術(shù)。下期《電子工程專輯》的精英訪談即是采訪Prophesee CEO Luca Verre,其中相對詳細(xì)地介紹了這類神經(jīng)形態(tài)視覺技術(shù)。這種傳感器的特色在于不受幀率限制(可實現(xiàn)等效10000fps的幀率),以及僅在場景中的對象發(fā)生動態(tài)變化時,才記錄信息。
其優(yōu)勢在于產(chǎn)生數(shù)據(jù)量少、反應(yīng)速度快、可實現(xiàn)高動態(tài)范圍。而且這種技術(shù)天然地適用于機器視覺,Luca Verre在接受采訪時說:“在機器視覺領(lǐng)域,我們認(rèn)為基于事件的視覺傳感器是可以替代傳統(tǒng)基于幀的圖像傳感器技術(shù)的。而在成像領(lǐng)域,傳統(tǒng)圖像傳感技術(shù)本身是沒有問題的。”機器視覺領(lǐng)域的變革,大概還會有一波全新的浪潮。
編輯:jq
-
傳感器
+關(guān)注
關(guān)注
2548文章
50680瀏覽量
752020 -
CMOS
+關(guān)注
關(guān)注
58文章
5680瀏覽量
235147 -
傳感器芯片
+關(guān)注
關(guān)注
6文章
205瀏覽量
23779 -
AI
+關(guān)注
關(guān)注
87文章
30147瀏覽量
268422 -
計算機視覺
+關(guān)注
關(guān)注
8文章
1696瀏覽量
45928
原文標(biāo)題:當(dāng)車載攝像頭應(yīng)用AI,圖像傳感器遇到的那些挑戰(zhàn)
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
攝像頭及紅外成像的基本工作原理

利用Premier參考圖像傳感器模塊簡化攝像頭開發(fā)

小個頭大技術(shù),XR設(shè)備上的圖像傳感器
采用 CMOS傳感器的監(jiān)控攝像頭參考設(shè)計
智能攝像頭抄表器是什么?

愛芯元智持續(xù)拓展CMOS圖像傳感器黃金賽道,引領(lǐng)行業(yè)革新

攝像頭各標(biāo)定參數(shù)的作用

探討車載攝像頭ESD問題的成因及解決策略
攝像頭凸透鏡成像原理 攝像的原理是小孔成像嗎
詳解智能座艙內(nèi)部的各種攝像頭


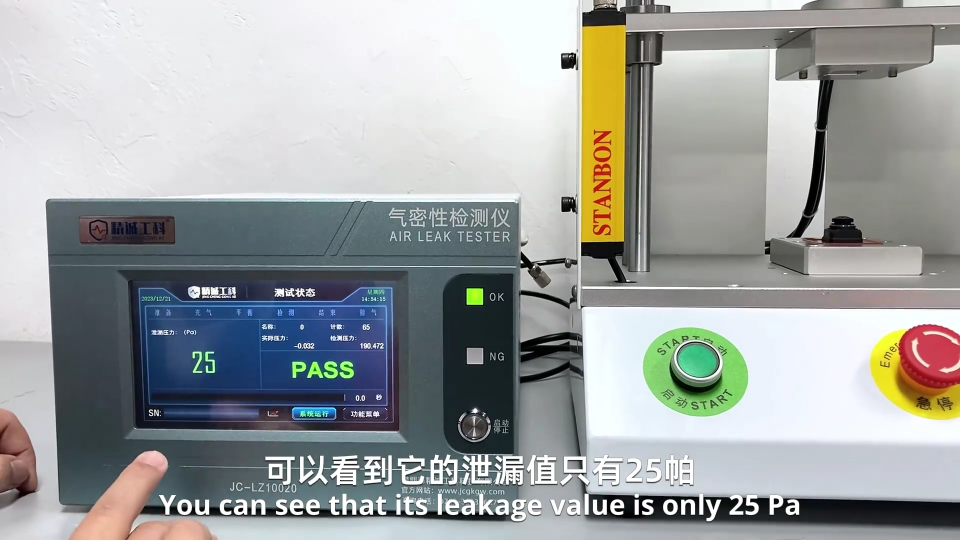
倒車影像IP68防水密封性怎么測試?車載攝像頭氣密性檢測方案 #攝像頭 #氣密性檢測儀 #氣密性測試設(shè)備
車載攝像頭Tier2研究:鏡頭企業(yè)競爭攝像頭模組賽道,CIS實現(xiàn)跨越式發(fā)展


什么是CMOS圖像傳感器?CMOS圖像傳感器的基本名詞解釋






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論