") 剛剛起步的國產(chǎn)醫(yī)用機器人產(chǎn)業(yè)迎來了好時光
剛剛起步的國產(chǎn)醫(yī)用機器人產(chǎn)業(yè)迎來了好時光
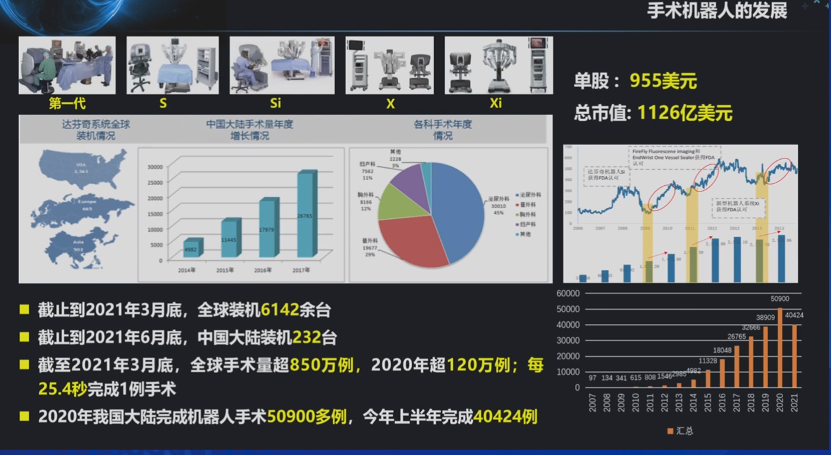
(文/程文智)說到醫(yī)用機器人,人們比較容易想到能幫助醫(yī)生做手術(shù)的“達芬奇”,它確實是目前全球最為成功的一款手術(shù)機器人。據(jù)統(tǒng)計截至今年3月,全球安裝了6142臺,截止今年6月底,國內(nèi)安裝了232臺。今年上半年達芬奇在國內(nèi)完成了4萬多例手術(shù),估計今年全年可完成10萬例手術(shù)。
在國內(nèi),這幾年醫(yī)用機器人的發(fā)展速度也越來越快,特別是最近5到10年,出現(xiàn)了不少醫(yī)用機器人公司。據(jù)蘇州大學機電工程學院院長、機器人技術(shù)與系統(tǒng)國家重點實驗室副主任孫立寧在第七屆中國機器人峰會上介紹說,近期以醫(yī)用機器人為名字的公司就有100多家,主要分布在長三角和珠三角地區(qū),而且現(xiàn)在資本也很關(guān)注醫(yī)用機器人產(chǎn)業(yè)。近期國內(nèi)的醫(yī)用機器人公司,比如微創(chuàng)、康多等公司的發(fā)展也很迅速。
在他看來,目前國內(nèi)的醫(yī)療機器人生態(tài)圈基本已經(jīng)成型,無論是高校、政府、資本、行業(yè)和標委會都在推動醫(yī)療機器人產(chǎn)業(yè)的創(chuàng)新與發(fā)展。
醫(yī)用機器人產(chǎn)業(yè)規(guī)模
據(jù)中國食品藥品檢定研究院醫(yī)療器械檢定所所長李靜莉介紹,2020年全球醫(yī)用機器人市場規(guī)模為180億元,預計今年將達到207億元,而中國的市場規(guī)模在2020年為41.5億元,預計今年將達到47.7億元,約占了全球市場規(guī)模的1/4。
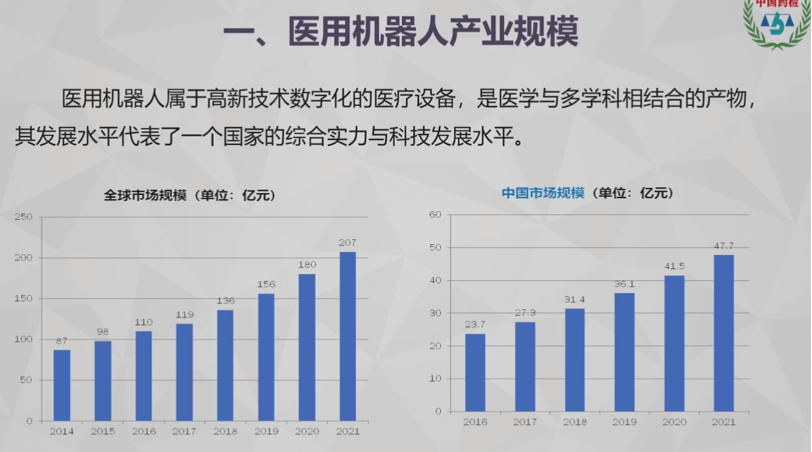
圖:醫(yī)用機器人產(chǎn)業(yè)規(guī)模
國內(nèi)醫(yī)用機器人的情況
來自哈爾濱工業(yè)大學的教授、機器人研究所副所長杜志江教授介紹了國內(nèi)醫(yī)用機器人,特別是手術(shù)機器人的發(fā)展情況。在他看來,目前已經(jīng)進入到手術(shù)機器人的時代。
從醫(yī)用機器人的特點來說,可分類為診斷型、操作型、康復型、服務(wù)型醫(yī)用機器人。手術(shù)機器人一般是操作型的機器人,其最典型的代表是達芬奇。近幾年來,達芬奇廣為醫(yī)院所接受,談到具體原因時,杜志江教授表示有以下幾個原因,一是,它繼承了微創(chuàng)的理念;二是,可提供高清的視野;三是,學習曲線短;四是,術(shù)者在手術(shù)過程中不易疲勞。
因此,此類機器人出現(xiàn)以后,經(jīng)過一段時間的市場培育后,現(xiàn)在,大部分的醫(yī)院都是比較愿意接受這樣的一套系統(tǒng)的。
其實,除了達芬奇以外,加拿大、荷蘭、德國、英國、意大利、韓國和日本等國家在手術(shù)機器人方面都有布局,且紛紛拿到了他們國家的FDA認證,據(jù)說他們都想進入中國市場。
當然,除了這些國外的公司,國內(nèi)也有不少公司推出了相關(guān)產(chǎn)品,比如哈爾濱的思哲睿、蘇州康多、北京術(shù)銳、山東威高、上海微創(chuàng)、杭州術(shù)創(chuàng)、深圳精峰等等。
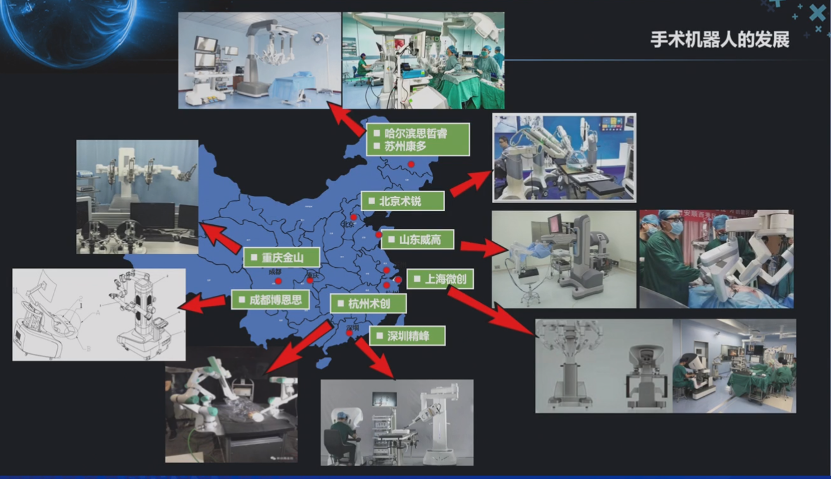
圖:國內(nèi)手術(shù)機器人主要供應(yīng)商
據(jù)杜志江教授介紹,他們團隊自2008年開始就致力于手術(shù)機器人的研究。2012年,在301醫(yī)院的牽頭下,哈工大、天津大學、南開大學幾個大學一起在301動物實驗室,使用手術(shù)機器人完成了活體動物實驗,隨后還完成了膽囊切除,及腎全切手術(shù)。
中國手術(shù)機器人的起步,開始于863計劃的支持。杜志江表示,“最開始的項目就是腹腔鏡手術(shù)機器人,雖然完成動物實驗后,項目就可以結(jié)束了。但在劉老師的鼓勵下,我們繼續(xù)將這個系統(tǒng)往臨床方面研究。”
他坦承,第一代手術(shù)機器人完全是從工科的思維出發(fā),參照達芬奇系統(tǒng)進行設(shè)計研發(fā)的。后來在醫(yī)生的參與下,他們給出了很多指導意見,比如以前很多東西無法在臨床中應(yīng)用,消毒很難解決、實時性等問題。為了解決這些臨床中的問題,他們團隊將整個系統(tǒng)都重新設(shè)計了,包括手術(shù)器件、控制臺、控制系統(tǒng)等等。

圖:杜志江教授團隊開發(fā)的腹腔鏡手術(shù)機器人
他同時談到,國內(nèi)的第一代醫(yī)用機器人非常創(chuàng)新,但是臨床上無法使用。當時大家都是用工科思維來做機器人,對醫(yī)生需要什么、患者需要什么完全沒有概念。杜志江舉例說,“我們不知道病的位置,怎么輔助醫(yī)生,也不知道手術(shù)過程中,醫(yī)生真正用器械完成什么動作等等。”
國內(nèi)醫(yī)用機器人遇到的問題
杜志江教授還分享了一些他在多年做手術(shù)機器人過程當中觀察到的一些情況,他主要歸結(jié)為三個方面。
首先是創(chuàng)新與臨床需求的關(guān)系。他認為做機器人研究創(chuàng)新是必要的,但一定要結(jié)合臨床需求進行創(chuàng)新,而不能從工科思維出發(fā),為了創(chuàng)新而創(chuàng)新,這樣的話,最后在臨床上會走不下去。
臨床中醫(yī)生的需求有很多,比如主從操作,多臂協(xié)同;對切口位置要求放寬;快捷擺位,減少準備時間;接口統(tǒng)一,能快速切換。
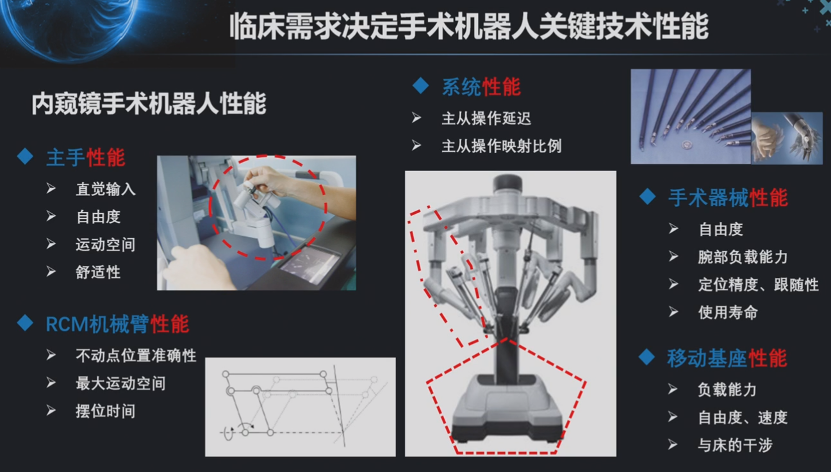
他拿內(nèi)窺鏡手術(shù)機器人的臨床需求對手術(shù)機器人的性能要求舉例說,從主手性能方面來說,
不能讓醫(yī)生在操作過程中考慮機器人往前、往后,他只考慮怎么做手術(shù),主手必須完成醫(yī)生的知覺輸入,所有動作是下意識的,要識別出來。
從系統(tǒng)性能方面來說,一開始手術(shù)機器人的實時性都不行。實時性影響手術(shù)的流暢性,流暢性影響患者的安全性,實時性必須要保證。而你直接問醫(yī)生多高的實時性能夠滿足要求,他們也是講不出來的,只能通過感覺,不同的醫(yī)生感覺不一樣。有的人性子急,手術(shù)非常快,有的人手術(shù)慢一點,因此,對實時性的要求不一樣。從系統(tǒng)的角度講,主從操作的延遲性比較要達到最快醫(yī)生的要求。
從RCM機械臂性能方面來說,醫(yī)生做手術(shù)的時候,對腹壁的損傷都是有的,如果做不好,對患者傷害會很大,因此手術(shù)機器人在設(shè)計的時候就需要考慮不動點位置的準確性、最大運動空間,以及擺位時間問題。
第二是標準的問題,工業(yè)機器人跟醫(yī)療機器人的標準是不一樣的。工業(yè)機器人大都是人機分離的,而醫(yī)用機器人是人機共融的,從需求到狀態(tài)都發(fā)成了根本性的改變,這樣就要求有新的標準進行規(guī)范。事實上不僅是醫(yī)用機器人,工業(yè)機器人也在制定從安全性、工作理念方面變更性的新標準,醫(yī)用機器人更得做相應(yīng)的標準。
目前國際機器人標準有ISO、IEC等,最近還成立了聯(lián)合工作組,一開始叫JWG9,后來拆分成JWG35和36,其中35是針對手術(shù)機器人標準的,36是做康復機器人標準的。目前已經(jīng)采用的兩個標準是-77和-78。
第三是智能。現(xiàn)在的機器人離不開智能,但醫(yī)用機器人的智能可能會變得更慎重。當年JWG9的時候,出臺了T2,叫做60001-4-1,這也發(fā)布了。實際上來說,它對醫(yī)療機器人的智能分了16級,二個二進制,分了四個過程,按照現(xiàn)在從檢查、診斷、確定手術(shù)方案、執(zhí)行,這四大步驟由誰完成,到底是人還是機器,由機器完成代表水平高,由人完成代表水平低。按照這種分類的話,達芬奇這種處于第八級,執(zhí)行層是機器完成的。
但是現(xiàn)在很多研究離臨床還有很遠的距離,反而智能水平達到15級,從檢查開始都是自助完成的,但是這類系統(tǒng)真正進入臨床還有非常遙遠的距離。
首先智能程度跟風險等級沒有直接的關(guān)系,但是它影響風險的管控過程。不是說智能高風險就高,但是需要進行管控。其次是引進智能以后,操作者和設(shè)備件的共同責任如何切分變得非常關(guān)鍵,這涉及到政策層面和法律層面,這是要關(guān)注的一點,不能真正在臨床中引用智能,這要條規(guī)進行規(guī)范。
結(jié)語
目前手術(shù)機器人已經(jīng)是臨床的剛性需求,各科室的醫(yī)生對此都非常感興趣,它的形態(tài)和技術(shù)特性不取決于工科思維,而取決于臨床需求和使用者反饋,此外,智能化也是目前大家所關(guān)注的,但不能為了追求智能而智能。
總的來說,國內(nèi)醫(yī)用機器人產(chǎn)業(yè)才剛剛起步,未來還有很長的路要走。
在國內(nèi),這幾年醫(yī)用機器人的發(fā)展速度也越來越快,特別是最近5到10年,出現(xiàn)了不少醫(yī)用機器人公司。據(jù)蘇州大學機電工程學院院長、機器人技術(shù)與系統(tǒng)國家重點實驗室副主任孫立寧在第七屆中國機器人峰會上介紹說,近期以醫(yī)用機器人為名字的公司就有100多家,主要分布在長三角和珠三角地區(qū),而且現(xiàn)在資本也很關(guān)注醫(yī)用機器人產(chǎn)業(yè)。近期國內(nèi)的醫(yī)用機器人公司,比如微創(chuàng)、康多等公司的發(fā)展也很迅速。
在他看來,目前國內(nèi)的醫(yī)療機器人生態(tài)圈基本已經(jīng)成型,無論是高校、政府、資本、行業(yè)和標委會都在推動醫(yī)療機器人產(chǎn)業(yè)的創(chuàng)新與發(fā)展。
醫(yī)用機器人產(chǎn)業(yè)規(guī)模
據(jù)中國食品藥品檢定研究院醫(yī)療器械檢定所所長李靜莉介紹,2020年全球醫(yī)用機器人市場規(guī)模為180億元,預計今年將達到207億元,而中國的市場規(guī)模在2020年為41.5億元,預計今年將達到47.7億元,約占了全球市場規(guī)模的1/4。
圖:醫(yī)用機器人產(chǎn)業(yè)規(guī)模
國內(nèi)醫(yī)用機器人的情況
來自哈爾濱工業(yè)大學的教授、機器人研究所副所長杜志江教授介紹了國內(nèi)醫(yī)用機器人,特別是手術(shù)機器人的發(fā)展情況。在他看來,目前已經(jīng)進入到手術(shù)機器人的時代。
從醫(yī)用機器人的特點來說,可分類為診斷型、操作型、康復型、服務(wù)型醫(yī)用機器人。手術(shù)機器人一般是操作型的機器人,其最典型的代表是達芬奇。近幾年來,達芬奇廣為醫(yī)院所接受,談到具體原因時,杜志江教授表示有以下幾個原因,一是,它繼承了微創(chuàng)的理念;二是,可提供高清的視野;三是,學習曲線短;四是,術(shù)者在手術(shù)過程中不易疲勞。
因此,此類機器人出現(xiàn)以后,經(jīng)過一段時間的市場培育后,現(xiàn)在,大部分的醫(yī)院都是比較愿意接受這樣的一套系統(tǒng)的。
其實,除了達芬奇以外,加拿大、荷蘭、德國、英國、意大利、韓國和日本等國家在手術(shù)機器人方面都有布局,且紛紛拿到了他們國家的FDA認證,據(jù)說他們都想進入中國市場。
當然,除了這些國外的公司,國內(nèi)也有不少公司推出了相關(guān)產(chǎn)品,比如哈爾濱的思哲睿、蘇州康多、北京術(shù)銳、山東威高、上海微創(chuàng)、杭州術(shù)創(chuàng)、深圳精峰等等。
圖:國內(nèi)手術(shù)機器人主要供應(yīng)商
據(jù)杜志江教授介紹,他們團隊自2008年開始就致力于手術(shù)機器人的研究。2012年,在301醫(yī)院的牽頭下,哈工大、天津大學、南開大學幾個大學一起在301動物實驗室,使用手術(shù)機器人完成了活體動物實驗,隨后還完成了膽囊切除,及腎全切手術(shù)。
中國手術(shù)機器人的起步,開始于863計劃的支持。杜志江表示,“最開始的項目就是腹腔鏡手術(shù)機器人,雖然完成動物實驗后,項目就可以結(jié)束了。但在劉老師的鼓勵下,我們繼續(xù)將這個系統(tǒng)往臨床方面研究。”
他坦承,第一代手術(shù)機器人完全是從工科的思維出發(fā),參照達芬奇系統(tǒng)進行設(shè)計研發(fā)的。后來在醫(yī)生的參與下,他們給出了很多指導意見,比如以前很多東西無法在臨床中應(yīng)用,消毒很難解決、實時性等問題。為了解決這些臨床中的問題,他們團隊將整個系統(tǒng)都重新設(shè)計了,包括手術(shù)器件、控制臺、控制系統(tǒng)等等。
圖:杜志江教授團隊開發(fā)的腹腔鏡手術(shù)機器人
他同時談到,國內(nèi)的第一代醫(yī)用機器人非常創(chuàng)新,但是臨床上無法使用。當時大家都是用工科思維來做機器人,對醫(yī)生需要什么、患者需要什么完全沒有概念。杜志江舉例說,“我們不知道病的位置,怎么輔助醫(yī)生,也不知道手術(shù)過程中,醫(yī)生真正用器械完成什么動作等等。”
國內(nèi)醫(yī)用機器人遇到的問題
杜志江教授還分享了一些他在多年做手術(shù)機器人過程當中觀察到的一些情況,他主要歸結(jié)為三個方面。
首先是創(chuàng)新與臨床需求的關(guān)系。他認為做機器人研究創(chuàng)新是必要的,但一定要結(jié)合臨床需求進行創(chuàng)新,而不能從工科思維出發(fā),為了創(chuàng)新而創(chuàng)新,這樣的話,最后在臨床上會走不下去。
臨床中醫(yī)生的需求有很多,比如主從操作,多臂協(xié)同;對切口位置要求放寬;快捷擺位,減少準備時間;接口統(tǒng)一,能快速切換。
他拿內(nèi)窺鏡手術(shù)機器人的臨床需求對手術(shù)機器人的性能要求舉例說,從主手性能方面來說,
不能讓醫(yī)生在操作過程中考慮機器人往前、往后,他只考慮怎么做手術(shù),主手必須完成醫(yī)生的知覺輸入,所有動作是下意識的,要識別出來。
從系統(tǒng)性能方面來說,一開始手術(shù)機器人的實時性都不行。實時性影響手術(shù)的流暢性,流暢性影響患者的安全性,實時性必須要保證。而你直接問醫(yī)生多高的實時性能夠滿足要求,他們也是講不出來的,只能通過感覺,不同的醫(yī)生感覺不一樣。有的人性子急,手術(shù)非常快,有的人手術(shù)慢一點,因此,對實時性的要求不一樣。從系統(tǒng)的角度講,主從操作的延遲性比較要達到最快醫(yī)生的要求。
從RCM機械臂性能方面來說,醫(yī)生做手術(shù)的時候,對腹壁的損傷都是有的,如果做不好,對患者傷害會很大,因此手術(shù)機器人在設(shè)計的時候就需要考慮不動點位置的準確性、最大運動空間,以及擺位時間問題。
第二是標準的問題,工業(yè)機器人跟醫(yī)療機器人的標準是不一樣的。工業(yè)機器人大都是人機分離的,而醫(yī)用機器人是人機共融的,從需求到狀態(tài)都發(fā)成了根本性的改變,這樣就要求有新的標準進行規(guī)范。事實上不僅是醫(yī)用機器人,工業(yè)機器人也在制定從安全性、工作理念方面變更性的新標準,醫(yī)用機器人更得做相應(yīng)的標準。
目前國際機器人標準有ISO、IEC等,最近還成立了聯(lián)合工作組,一開始叫JWG9,后來拆分成JWG35和36,其中35是針對手術(shù)機器人標準的,36是做康復機器人標準的。目前已經(jīng)采用的兩個標準是-77和-78。
第三是智能。現(xiàn)在的機器人離不開智能,但醫(yī)用機器人的智能可能會變得更慎重。當年JWG9的時候,出臺了T2,叫做60001-4-1,這也發(fā)布了。實際上來說,它對醫(yī)療機器人的智能分了16級,二個二進制,分了四個過程,按照現(xiàn)在從檢查、診斷、確定手術(shù)方案、執(zhí)行,這四大步驟由誰完成,到底是人還是機器,由機器完成代表水平高,由人完成代表水平低。按照這種分類的話,達芬奇這種處于第八級,執(zhí)行層是機器完成的。
但是現(xiàn)在很多研究離臨床還有很遠的距離,反而智能水平達到15級,從檢查開始都是自助完成的,但是這類系統(tǒng)真正進入臨床還有非常遙遠的距離。
首先智能程度跟風險等級沒有直接的關(guān)系,但是它影響風險的管控過程。不是說智能高風險就高,但是需要進行管控。其次是引進智能以后,操作者和設(shè)備件的共同責任如何切分變得非常關(guān)鍵,這涉及到政策層面和法律層面,這是要關(guān)注的一點,不能真正在臨床中引用智能,這要條規(guī)進行規(guī)范。
結(jié)語
目前手術(shù)機器人已經(jīng)是臨床的剛性需求,各科室的醫(yī)生對此都非常感興趣,它的形態(tài)和技術(shù)特性不取決于工科思維,而取決于臨床需求和使用者反饋,此外,智能化也是目前大家所關(guān)注的,但不能為了追求智能而智能。
總的來說,國內(nèi)醫(yī)用機器人產(chǎn)業(yè)才剛剛起步,未來還有很長的路要走。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關(guān)注
關(guān)注
210文章
28231瀏覽量
206614 -
醫(yī)療電子
+關(guān)注
關(guān)注
30文章
1357瀏覽量
90081 -
醫(yī)療機器人
+關(guān)注
關(guān)注
3文章
220瀏覽量
55620
發(fā)布評論請先 登錄
相關(guān)推薦
旗晟機器人:在能源機器人產(chǎn)業(yè)推進委員會中探索發(fā)展
10月29日,杭州迎來了一場備受矚目的行業(yè)盛會—— 能源機器人產(chǎn)業(yè)推進委員會第一屆第一次委員大會 。此次大會由浙江省機器人產(chǎn)業(yè)發(fā)展協(xié)會主辦,
2026年:人形機器人產(chǎn)業(yè)規(guī)模預計超200億元大關(guān)
與投資的強勁驅(qū)動,預計人形機器人產(chǎn)業(yè)將在2024年和2025年迎來持續(xù)的高速增長,至2026年,我國人形機器人產(chǎn)業(yè)的規(guī)模有望突破200億元大
醫(yī)療機器人有哪些_醫(yī)療機器人有哪些應(yīng)用
醫(yī)療機器人是醫(yī)用機器人工程的重要應(yīng)用,結(jié)合了各個學科最新研究和發(fā)展的成果,并廣泛應(yīng)用于醫(yī)學診療、康復等醫(yī)學領(lǐng)域。醫(yī)療機器人的類型多種多樣,以下是主要的一些類型:
科沃斯助力吳中區(qū)機器人+人工智能產(chǎn)業(yè)發(fā)展
科沃斯機器人總部迎來了一場盛會——吳中區(qū)機器人+人工智能產(chǎn)業(yè)專班走進科沃斯機器人產(chǎn)業(yè)鏈供需對接會
地瓜機器人攜手廣和通共推智能機器人新紀元
2024年9月20日,深圳迎來了科技界的一場盛會——地瓜機器人開發(fā)者日暨新品發(fā)布會圓滿舉行。此次活動不僅見證了地瓜機器人在智能計算領(lǐng)域的又一里程碑,還深化了其與廣和通作為官方授權(quán)硬件IDH合作伙伴的緊密合作,共同為智能
國產(chǎn)工業(yè)機器人與進口機器人區(qū)別有哪些
? ? ? ? ? 國產(chǎn)工業(yè)機器人與進口機器人相比,技術(shù)性能。國產(chǎn)機器人技術(shù)水平不斷提高,但與國際先進水平相比仍有一定差距。 價格。
Al大模型機器人
金航標kinghelm薩科微slkor總經(jīng)理宋仕強介紹說,薩科微Al大模型機器人有哪些的優(yōu)勢?薩科微AI大模型機器人由清華大學畢業(yè)的天才少年N博士和王博士團隊開發(fā),與同行相比具有許多優(yōu)勢:語言
發(fā)表于 07-05 08:52
華數(shù)機器人合力打造產(chǎn)業(yè)發(fā)展生態(tài)
3月8日,重慶市兩江新區(qū)黨工委副書記、管委會副主任許宏球蒞臨華數(shù)機器人調(diào)研,兩江新區(qū)產(chǎn)業(yè)促進局局長楊虹、兩江新區(qū)科創(chuàng)局局長向悅文、兩江投資集團總經(jīng)理尹曉華等領(lǐng)導陪同,華數(shù)機器人董事長王群、總經(jīng)理楊
PCB行業(yè):用協(xié)作機器人,就選大族機器人
近年來,電子產(chǎn)業(yè)的爆發(fā)式需求,讓PCB行業(yè)迎來了快速發(fā)展的同時,也帶來了更加激烈的行業(yè)競爭。為了在擁擠的風口屹立不倒,許多PCB廠家選用協(xié)作安全、柔性生產(chǎn)、使用簡單和部署快捷的協(xié)作機器人
全球首款具有仿人脊柱核心功能的人形機器人來了!
2023年被稱為人形機器人產(chǎn)業(yè)化的“破曉時刻”,行業(yè)迎來爆發(fā)式增長,眾多企業(yè)紛紛推出各自的人形機器人產(chǎn)品。
2024年,人形機器人迎來產(chǎn)業(yè)化元年
2023年,人形機器人Digit進入亞馬遜工廠驗證,2024年,特斯拉人形機器人,優(yōu)必選、智元機器人有望分別進入特斯拉工廠和BYD工廠進行商業(yè)化驗證,人形機器人迎來
發(fā)表于 01-23 11:30
?539次閱讀
國產(chǎn)人形機器人產(chǎn)業(yè)發(fā)展現(xiàn)狀
具備初級感知功能的智能化起步階段(2001-2015年),進入二十一世紀,隨著感知系統(tǒng)及交互系統(tǒng)等技術(shù)進步,人形機器人在該階段可實現(xiàn)與外界環(huán)境有限的互動,并且運動自由度提升,能實現(xiàn)行走以外的其他簡單行動操作,例如本田由 P系列所迭代出的 ASIMO 系列中的“All-ne

大象機器人發(fā)布萬元級水星Mercury人形機器人產(chǎn)品系列
人形機器人作為機器人產(chǎn)業(yè)中重要的一環(huán),其有著獨特的技術(shù)和功能,廣泛應(yīng)用于教育、科研、服務(wù)、娛樂和工業(yè)等領(lǐng)域,帶來了前所未有的便利和效率。
發(fā)表于 12-22 16:19
?280次閱讀

工業(yè)機器人產(chǎn)業(yè)發(fā)展及應(yīng)用現(xiàn)狀
機器人(Robot)是一種能夠半自主或全自主工作的智能機器。機器人能夠通過編程和自動控制來執(zhí)行諸如作業(yè)或移動等任務(wù)。根據(jù)制造目的的不同, 機器人可分為工業(yè)
發(fā)表于 12-21 16:07
?1435次閱讀

ROS讓機器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
ROS系統(tǒng)是什么
ROS(Robot Operating System)是一個適用于機器人的開源的元操作系統(tǒng)。它提供了操作系統(tǒng)應(yīng)有的服務(wù),包括硬件抽象,底層設(shè)備控制,常用函數(shù)的實現(xiàn),進程間消息傳遞
發(fā)表于 11-30 16:01





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論