 深入理解PWM控制電機轉速的原理
深入理解PWM控制電機轉速的原理
經常使用的直流電機原理就是電生磁:通電導線會產生磁場。
也就是電磁感應 旋轉磁場帶動轉子轉動。
電動機是由定子和轉子組成,一個產生旋轉磁場,一個為磁極,電機的轉子(軸承)就轉起來了。
這便實現了電能-》磁能-》機械能的轉換。
下面這個圖可以更直觀的理解:
PWM原理
關于PWM的原理請參照這篇文章:PWM原理及其應用。
通過上文大概知道,通過PWM控制電機速度,實際上是控制供電電流的大小來實現。
通電導線在磁場中受到的力稱為安培力,而安培力的公式:F=BIL。
其中,F是受力大小,I是電流大小,L是導線長度。在其他條件不變的情況下,控制其通過的電流即控制安培力的大小。
電機的電阻R 是基本不變的,那么電流 I = U/R,F= BLU/R。
在R B L不變的情況,控制安培力的大小,本質就是修改供電電壓的大小。
我們也就知道,控制電機轉速的本質就是給電機供不同的供電電壓,電壓越大,電機轉速越快。
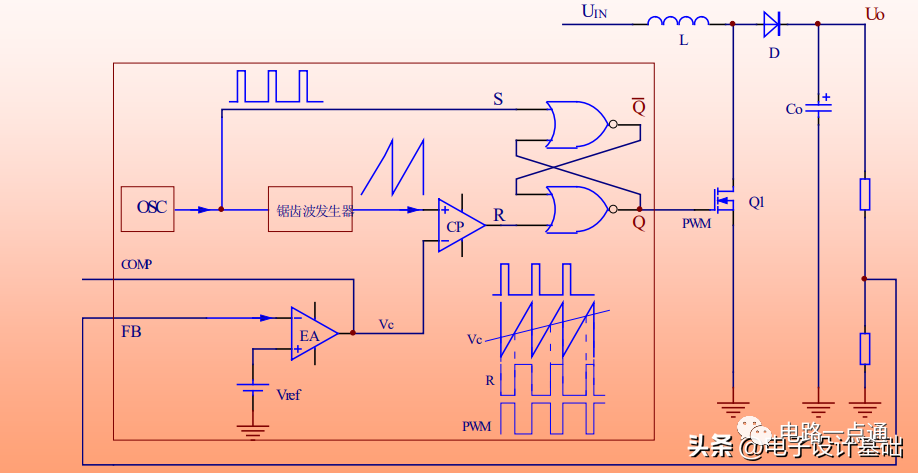
而PWM的本質就是脈寬調制,通過輸出不同的占空比,從而將直流電壓轉換成不同電壓值的模擬信號。
控制電機速度
占空比可以實現對電機轉速的調節,我們知道,占空比是高電平在一個周期之中的比值,高電平的所占的比值越大,占空比就越大,對于直流電機來講,電機輸出端引腳是高電平電機就可以轉動,當輸出端高電平時,電機會轉動。
但是是一點一點的提速,在高電平突然轉向低電平時,電機由于電感有防止電流突變的作用是不會停止的,會保持這原有的轉速,以此往復,電機的轉速就是周期內輸出的平均電壓值,所以實質上我們調速是將電機處于一種,似停非停,似全速轉動又非全速轉動的狀態,那么在一個周期的平均速度就是我們占空比調出來的速度了。
總結
在電機控制中,電壓越大,電機轉速越快,而通過PWM輸出不同的模擬電壓,便可以使電機達到不同的輸出轉速。
當然,在電機控制中,不同的電機都有其適應的頻率 頻率太低會導致運動不穩定,如果頻率剛好在人耳聽覺范圍,有時還會聽到呼嘯聲。頻率太高的電機可能反應不過來,正常的電機頻率在 6-16kHZ之間為好。
輸出的電壓就不同,電機轉速就不同。那我們可以知道,通過滑動變阻器或者更換不同電壓的電源都可以實現電機的調速,但是在實際應用中顯然PWM更方便些。
專業一點的話就是:
所謂PWM就是脈寬調制器,通過調制器給電機提供一個具有一定頻率的脈沖寬度可調的脈沖電。脈沖寬度越大即占空比越大,提供給電機的平均電壓越大,電機轉速就高。反之脈沖寬度越小,則占空比越越小。提供給電機的平均電壓越小,電機轉速就低。
編輯:jq
-
PWM
+關注
關注
114文章
5142瀏覽量
213398
原文標題:淺析PWM控制電機轉速的原理
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
步進電機轉速怎么控制高低
深入理解FPD-link III ADAS解串器HUB產品






 工商網監
工商網監
評論