") 剖析經(jīng)典濾波算法的圖像復(fù)原技術(shù)研究
剖析經(jīng)典濾波算法的圖像復(fù)原技術(shù)研究
1 引言
圖像增強(qiáng)是指按特定的需要突出一幅圖像中的某些信息,同時(shí)削弱或者去除某些不需要的信息的處理方法。圖像增強(qiáng)技術(shù)就是把圖像中對(duì)觀測(cè)者有用的信息加以增強(qiáng),使圖像使用起來(lái)更方便、視覺(jué)效果更好。
比如使淹沒(méi)在噪聲中的圖像呈現(xiàn)出來(lái),或者把對(duì)比度低的圖像顯示成對(duì)比度高的圖像,或加強(qiáng)空間頻率的高頻分量,使圖像色調(diào)清晰等。常規(guī)的圖像增強(qiáng)方法有直方圖均衡、同態(tài)增晰等。直方圖均衡法是一種常用的技術(shù),對(duì)于直方圖范圍不大的圖像增強(qiáng)是非常有效的。
但是,對(duì)于某些灰度頻數(shù)較小的區(qū)域,對(duì)比度將會(huì)被減弱,甚至?xí)@部分信息。另外,直方圖均衡法對(duì)噪聲比較敏感,在增強(qiáng)圖像視覺(jué)效果的同時(shí)也會(huì)增強(qiáng)噪聲。
圖像退化是指由于成像系統(tǒng)受到各種因素的影響,使得圖像質(zhì)量降低。引起圖像退化的原因有成像系統(tǒng)的散焦;成像設(shè)備與物體的相對(duì)運(yùn)動(dòng);成像器材的固有缺陷;外部干擾等。圖像復(fù)原可以看作是圖像退化的逆過(guò)程,是將圖像退化的過(guò)程加以估計(jì),建立退化的數(shù)學(xué)模型后,補(bǔ)償退化過(guò)程造成的失真。
圖像恢復(fù)存在的困難,主要是因?yàn)橥嘶^(guò)程并不知曉,這種情況下的復(fù)原屬于盲目復(fù)原。由于圖像模糊的同時(shí),噪聲和干擾也會(huì)同時(shí)存在,這也為圖像復(fù)原帶來(lái)了困難和不確定性。
光學(xué)圖像的噪聲主要來(lái)源于圖像的獲取和傳輸過(guò)程。圖像獲取的數(shù)字化過(guò)程,如圖像傳感器的質(zhì)量和環(huán)境條件。圖像傳輸過(guò)程中傳輸信道的噪聲干擾,如通過(guò)無(wú)線網(wǎng)絡(luò)傳輸?shù)膱D像會(huì)受到光或其它大氣因素的干擾。
經(jīng)典的去噪濾波算法主要是去除高頻分量,比如噪聲,當(dāng)然也會(huì)去除邊緣和角點(diǎn)等細(xì)節(jié)信息,通常人們的視覺(jué)主要集中于圖像中間位置,對(duì)于邊緣部分不太關(guān)注,因此,對(duì)比研究經(jīng)典濾波算法在去除圖像噪聲恢復(fù)原始圖像中仍然十分有用。
2 經(jīng)典濾波算法去噪復(fù)原技術(shù)
2.1圖像復(fù)原國(guó)內(nèi)外研究現(xiàn)狀
圖像復(fù)原也叫圖像恢復(fù),是圖像處理中的一大類技術(shù)。無(wú)論是由光學(xué),還是電子方法獲得的圖像都會(huì)有不同程度的退化。由于獲得圖像的方法不同,其退化形式也是多種多樣,如傳感器噪聲、攝像機(jī)聚焦不準(zhǔn)確、物體與攝像設(shè)備之間的相對(duì)移動(dòng)、隨機(jī)大氣湍流、光學(xué)系統(tǒng)的相差、成像光源或射線的散射等,這些因素都會(huì)使成像的分辨率和對(duì)比度退化。
圖像復(fù)原和圖像增強(qiáng)有密切的聯(lián)系,相同之處是,它們都要得到在某種意義上改進(jìn)的圖像。不同之處是,圖像增強(qiáng)技術(shù)一般要借助人的視覺(jué)系統(tǒng)的特性以取得看起來(lái)較好的視覺(jué)效果,而圖像復(fù)原則認(rèn)為圖像在某種情況下退化或惡化了(圖像品質(zhì)下降),需要根據(jù)相應(yīng)的退化模型和知識(shí)重建或恢復(fù)原始圖像。
數(shù)字圖像處理研究很大部分都是致力于圖像復(fù)原,包括對(duì)算法的研究和對(duì)特定問(wèn)題的圖像處理程序的編制,國(guó)內(nèi)外學(xué)者都有相關(guān)的研究。對(duì)于退化的復(fù)原,一般采用兩種方法。一種方法是適用于對(duì)圖像缺乏先驗(yàn)知識(shí)的情況。
此時(shí)可對(duì)退化過(guò)程(模糊和噪聲)建立模型,進(jìn)而尋找一種去除或者削弱其影響的過(guò)程。另一種方法,若對(duì)于原始圖像有足夠的先驗(yàn)知識(shí),則對(duì)原始圖像建立一個(gè)數(shù)學(xué)模型,并根據(jù)它對(duì)退化圖像進(jìn)行擬合會(huì)更有效。
下面給出通用的退化模型,如圖2-1所示。在該模型中,圖像退化過(guò)程被模型化為一個(gè)作用在輸入圖像f(x,y)上的系統(tǒng)h(x,y)。它與一個(gè)加性噪聲n(x,y)的聯(lián)合作用導(dǎo)致退化圖像g(x,y)。根據(jù)這個(gè)模型恢復(fù)圖像就是要在給定g(x,y)和代表退化的h(x,y)的基礎(chǔ)上得到對(duì)f(x,y)的某個(gè)近似過(guò)程。假設(shè)已知n(x,y)的統(tǒng)計(jì)特性。
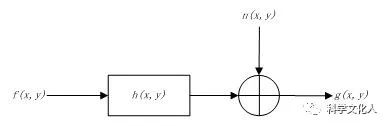
圖2-1 通用圖像退化模型
2.1.1 圖像噪聲濾波
圖像被噪聲污染是計(jì)算機(jī)視覺(jué)和圖像處理經(jīng)常要考慮的情形。圖像噪聲的類型很多,如加性噪聲、乘性噪聲、量化噪聲、椒鹽噪聲等。一般的原始圖像都混有各種噪聲,主要表現(xiàn)為高斯噪聲和椒鹽噪聲。椒鹽噪聲的形成通常不依賴于其相鄰像素,而是隨機(jī)產(chǎn)生,在圖像中表現(xiàn)為黑色或白色的污點(diǎn)。其產(chǎn)生的原因通常是由于傳輸錯(cuò)誤、相機(jī)傳感器元件缺陷或者寄存器的錯(cuò)誤定位等引起。
濾噪是圖像預(yù)處理的一個(gè)基本內(nèi)容,其目標(biāo)實(shí)在濾除噪聲的同時(shí)盡可能地保留圖像的邊緣和細(xì)節(jié)特征。現(xiàn)在的濾波方法有很多,大致可分為線性方法和非線性方法。圖像中混入的高斯噪聲,一般采用線性的均值濾波;
對(duì)于圖像中混入的椒鹽噪聲,一般采用非線性方法的中值濾波。中值濾波算法主要針對(duì)椒鹽噪聲進(jìn)行濾波,后來(lái)提出了一系列改進(jìn)型中值濾波,包括加權(quán)中值濾波[1],中心加權(quán)中值濾波[2]以及多級(jí)中值濾波[3]等。
高斯噪聲與椒鹽噪聲有較大的不同,椒鹽噪聲為極端噪聲,只污染一部分像素,受高斯噪聲污染的圖像每一個(gè)像素都會(huì)受到污染。對(duì)于同時(shí)受到椒鹽噪聲和高斯噪聲污染的圖像,通常采用的方法是先采用中值濾波方法消除圖像中的椒鹽噪聲,再用均值濾波方法去除高斯噪聲。
國(guó)內(nèi)外學(xué)者相繼提出了自適應(yīng)加權(quán)均值濾波[4]、基于局部統(tǒng)計(jì)的濾波器[5]、權(quán)值排序統(tǒng)計(jì)濾波器[6]以及基于神經(jīng)網(wǎng)絡(luò)技術(shù)的濾波器[7]等。
對(duì)高污染椒鹽噪聲的濾波方法國(guó)內(nèi)外學(xué)者也進(jìn)行了部分研究,如對(duì)噪聲監(jiān)測(cè)和濾波都采用反復(fù)遞歸的PSM算法[8]、Wei-Yu and Ja-Chen-Lin[9]提出了一種MMEM(Minimum-Maximum Exclusive Mean)濾波器來(lái)處理高污染噪聲圖像。Minggang Ma[10]和Mituhiro Okano等[11]把模糊技術(shù)引入高污染圖像濾波中,Shih-Mao Lu[12]等采用了神經(jīng)網(wǎng)絡(luò)的方法。
2.2 幾種經(jīng)典濾波算法
2.2.1 中值濾波
中值濾波是一種非線性信號(hào)處理方法,與其對(duì)應(yīng)的中值濾波器也就是一種非線性濾波器。
中值濾波法是一種非線性平滑技術(shù),它將每一像素點(diǎn)的灰度值設(shè)置為該點(diǎn)某鄰域窗口內(nèi)的所有像素點(diǎn)灰度值的中值。中值濾波在一定的條件下可以克服線性濾波帶來(lái)的圖像細(xì)節(jié)模糊問(wèn)題,且適用于濾除脈沖干擾及圖像掃描噪聲;
而且,其在使用中不需要分析圖像的統(tǒng)計(jì)特性。中值濾波法對(duì)消除椒鹽噪聲非常有效,在光學(xué)測(cè)量條紋圖象的相位分析處理方法中有特殊作用,但在條紋中心分析方法中作用不大。對(duì)一些細(xì)節(jié)多,特別是點(diǎn)、線、尖部多的圖像,不宜采用中值濾波方法。
2.2.2 高斯平滑濾波
高斯濾波是一種線性平滑濾波,適用于消除高斯噪聲,廣泛應(yīng)用于圖像處理的減噪過(guò)程。通俗的講,高斯濾波就是對(duì)整幅圖像進(jìn)行加權(quán)平均的過(guò)程,每一個(gè)像素點(diǎn)的值,都由其本身和鄰域內(nèi)的其他像素值經(jīng)過(guò)加權(quán)平均后得到。高斯濾波的具體操作是:用一個(gè)模板(或稱卷積、掩模)掃描圖像中的每一個(gè)像素,用模板確定的鄰域內(nèi)像素的加權(quán)平均灰度值去替代模板中心像素點(diǎn)的值。
2.2.3 維納濾波
維納濾波(wiener filtering) 是一種基于最小均方誤差準(zhǔn)則、對(duì)平穩(wěn)過(guò)程的最優(yōu)估計(jì)器。這種濾波器的輸出與期望輸出之間的均方誤差為最小,因此,它是一個(gè)最佳濾波系統(tǒng)。它可用于提取被平穩(wěn)噪聲所污染的信號(hào)。
從連續(xù)的(或離散的)輸入數(shù)據(jù)中濾除噪聲和干擾以提取有用信息的過(guò)程稱為濾波,這是信號(hào)處理中經(jīng)常采用的主要方法之一,具有十分重要的應(yīng)用價(jià)值,而相應(yīng)的裝置稱為濾波器。根據(jù)濾波器的輸出是否為輸入的線性函數(shù),可將它分為線性濾波器和非線性濾波器兩種。維納濾波器是一種線性濾波器。
2.3 經(jīng)典濾波算法原理
2.3.1 中值濾波原理
中值濾波是基于排序統(tǒng)計(jì)理論的一種能有效抑制噪聲的非線性信號(hào)處理技術(shù),中值濾波的基本原理是把數(shù)字圖像或數(shù)字序列中一點(diǎn)的值用該點(diǎn)的一個(gè)鄰域中各點(diǎn)值的中值代替,讓周圍的像素值接近的真實(shí)值,從而消除孤立的噪聲點(diǎn)。
方法是用某種結(jié)構(gòu)的二維滑動(dòng)模板,將板內(nèi)像素按照像素值的大小進(jìn)行排序,生成單調(diào)上升(或下降)的為二維數(shù)據(jù)序列。二維中值濾波輸出為g(x, y)=med{f(x-k, y-l),(k, l∈ W)},其中,f(x, y)、g(x, y)分別為原始圖像和處理后圖像。W為二維模板,通常為3*3,5*5區(qū)域,也可以是不同的的形狀,如線狀,圓形,十字形,圓環(huán)形等。
2.3.2 高斯平滑濾波原理
由于高斯函數(shù)的傅立葉變換仍是高斯函數(shù), 因此高斯函數(shù)能構(gòu)成一個(gè)在頻域具有平滑性能的低通濾波器。可以通過(guò)在頻域做乘積來(lái)實(shí)現(xiàn)高斯濾波。均值濾波是對(duì)信號(hào)進(jìn)行局部平均, 以平均值來(lái)代表該像素點(diǎn)的灰度值。
矩形濾波器(Averaging Box Filter)對(duì)這個(gè)二維矢量的每一個(gè)分量進(jìn)行獨(dú)立的平滑處理。通過(guò)計(jì)算和轉(zhuǎn)化 ,得到一幅單位矢量圖。這個(gè) 512×512的矢量圖被劃分成一個(gè) 8×8的小區(qū)域 ,再在每一個(gè)小區(qū)域中 ,統(tǒng)計(jì)這個(gè)區(qū)域內(nèi)的主要方向 ,亦即將對(duì)該區(qū)域內(nèi)點(diǎn)方向數(shù)進(jìn)行統(tǒng)計(jì),最多的方向作為區(qū)域的主方向。
于是就得到了一個(gè)新的64×64的矢量圖。這個(gè)新的矢量圖還可以采用一個(gè) 3×3模板進(jìn)行進(jìn)一步的平滑。
高斯濾波實(shí)質(zhì)上是一種信號(hào)的濾波器,其用途是信號(hào)的平滑處理,人們知道數(shù)字圖像用于后期應(yīng)用,其噪聲是最大的問(wèn)題,由于誤差會(huì)累計(jì)傳遞等原因,很多圖像處理教材會(huì)在很早的時(shí)候介紹Gauss濾波器,用于得到信噪比SNR較高的圖像(反映真實(shí)信號(hào))。
與此相關(guān)的有Gauss-Laplace變換,其實(shí)就是為了得到較好的圖像邊緣,先對(duì)圖像做Gauss平滑濾波,剔除噪聲,然后求二階導(dǎo)矢,用二階導(dǎo)的過(guò)零點(diǎn)確定邊緣,在計(jì)算時(shí)也是頻域乘積=》空域卷積。
濾波器就是建立的一個(gè)數(shù)學(xué)模型,通過(guò)這個(gè)模型來(lái)將圖像數(shù)據(jù)進(jìn)行能量轉(zhuǎn)化,噪聲就是屬于高頻率部分,高斯濾波器平滑處理后降低噪聲的影響。
2.3.3 維納濾波原理
維納濾波的基本原理是:設(shè)觀察信號(hào)y(t)含有彼此統(tǒng)計(jì)獨(dú)立的期望信號(hào)x(t)和白噪聲ω(t)可用維納濾波從觀察信號(hào)y(t)中恢復(fù)期望信號(hào)x(t)。設(shè)線性濾波器的沖擊響應(yīng)為h(t),此時(shí)其輸入y(t)為y(t)=x(t)+w(t),輸出:
(2-1)
從而,可以得到輸出。
對(duì)x(t)期望信號(hào)的誤差為
(2-2)
其均方誤差為
(2-3)
E[ ]表示數(shù)學(xué)期望。應(yīng)用數(shù)學(xué)方法求最小均方誤差時(shí)的線性濾波器的沖擊響應(yīng)hopt(t)可得如(4)方程。

(2-4)
式中,Ryx(t)為y(t)與x(t)的互相關(guān)函數(shù),Ryy(τ-σ)為y(t)的自相關(guān)函數(shù)。上述方程稱為維納-霍夫(Wiener-Hopf)方程。求解維納-霍夫方程可以得到最佳濾波器的沖擊響應(yīng)hopt(t)。在一般情況下,求解上述方程是有一定困難的,因此這在一定程度上限制了這一濾波理論的應(yīng)用。然而,維納濾波對(duì)濾波和預(yù)測(cè)理論的開(kāi)拓,影響著以后這一領(lǐng)域的發(fā)展。
2.4 設(shè)計(jì)過(guò)程
2.4.1 原始彩色圖像灰度化
本課程設(shè)計(jì)題目要求為:給定一幅模糊或含噪的圖像,用圖像增強(qiáng)或圖像復(fù)原技術(shù),改善圖像質(zhì)量,并給出PSNR指標(biāo)。
基于本題目,給出如下的設(shè)計(jì)過(guò)程。首先讀取一幅原始清晰圖像并將其灰度化,然后添加不同類型的噪聲,對(duì)加噪圖像進(jìn)行濾波算法處理,最后計(jì)算恢復(fù)圖像與原始灰度圖像的峰值信噪比,因此整個(gè)設(shè)計(jì)過(guò)程如2-2所示。

圖2-2 圖像復(fù)原處理過(guò)程
在Matlab編程時(shí),可以預(yù)先在程序文件夾目錄里存放一張彩色(或灰度)圖片,通過(guò)imread函數(shù)讀取圖片。當(dāng)然也可以直接讀取Matlab圖片庫(kù)中的圖片。通過(guò)rgb2gray函數(shù)將彩色圖像轉(zhuǎn)化為灰度圖像,以便于后續(xù)處理。圖2-3為讀取一幅彩色圖像與其灰度化圖像。
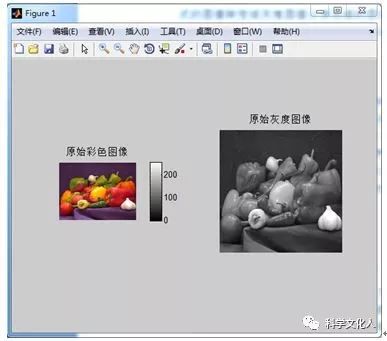
圖2-3 原始彩色圖像與其灰度圖
將彩色圖像轉(zhuǎn)化成為灰度圖像的過(guò)程稱為圖像的灰度化處理。彩色圖像中的每個(gè)像素的顏色有R、G、B三個(gè)分量決定,而每個(gè)分量有255中值可取,這樣一個(gè)像素點(diǎn)可以有1600多萬(wàn)(255*255*255)的顏色的變化范圍。
而灰度圖像是R、G、B三個(gè)分量相同的一種特殊的彩色圖像,其一個(gè)像素點(diǎn)的變化范圍為255種,所以在數(shù)字圖像處理種一般先將各種格式的圖像轉(zhuǎn)變成灰度圖像以使后續(xù)的圖像的計(jì)算量變得少一些。灰度圖像的描述與彩色圖像一樣仍然反映了整幅圖像的整體和局部的色度和亮度等級(jí)的分布和特征。圖像的灰度化處理可用兩種方法來(lái)實(shí)現(xiàn)。
第一種方法使求出每個(gè)像素點(diǎn)的R、G、B三個(gè)分量的平均值,然后將這個(gè)平均值賦予給這個(gè)像素的三個(gè)分量。
第二種方法是根據(jù)YUV的顏色空間中,Y的分量的物理意義是點(diǎn)的亮度,由該值反映亮度等級(jí),根據(jù)RGB和YUV顏色空間的變化關(guān)系可建立亮度Y與R、G、B三個(gè)顏色分量的對(duì)應(yīng):Y=0.3R+0.59G+0.11B,以這個(gè)亮度值表達(dá)圖像的灰度值。
2.4.2 灰度圖像加噪處理
為了模擬一幅受到污染的圖像,以及后續(xù)的峰值信噪比計(jì)算,可以通過(guò)給原始圖像加噪處理,模擬圖像退化過(guò)程,并且可通過(guò)濾波器檢驗(yàn)濾波算法的處理能力,比較不同濾波器對(duì)不同噪聲的濾波效果。本次設(shè)計(jì)中,對(duì)原始灰度圖像分別添加椒鹽噪聲、高斯噪聲、乘性噪聲,并繪制灰度圖像和加噪后圖像的直方圖。圖2-4給出了分別添加三中噪聲后的圖像,圖2-5為對(duì)應(yīng)的直方圖。
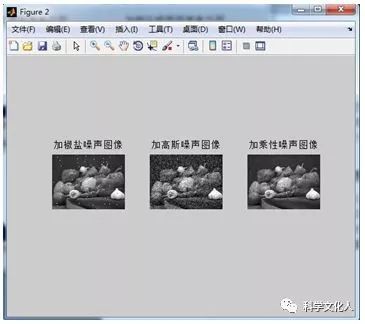
圖2-4 加噪圖像
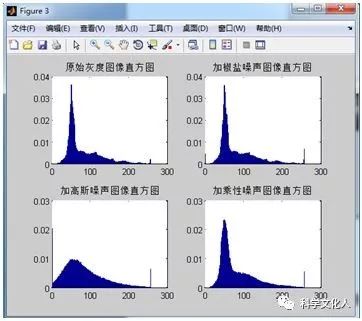
圖2-5原始灰度圖像與加噪圖像直方圖
2.4.3 加噪圖像濾波處理
在上一小節(jié)中,通過(guò)添加噪聲模擬了圖像退化過(guò)程,本小節(jié)將針對(duì)收到不同噪聲污染的圖像,通過(guò)中值濾波、高斯平滑濾波和維納濾波進(jìn)行處理。
(1)對(duì)于椒鹽噪聲,分別通過(guò)中值濾波算法、高斯平滑濾波算法和維納濾波算法進(jìn)行去噪,可通過(guò)視覺(jué)觀察去噪效果。圖2-6給出了三種濾波器針對(duì)椒鹽噪聲的去噪結(jié)果。圖2-7為原始灰度圖像和三種濾波算法下的去噪圖像的直方圖。直觀可以觀察看出,針對(duì)椒鹽噪聲,中值濾波具有較好的效果。
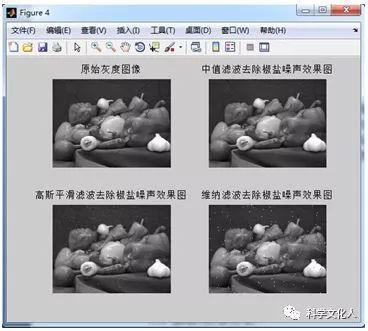
圖2-6去除椒鹽噪聲效果對(duì)比圖
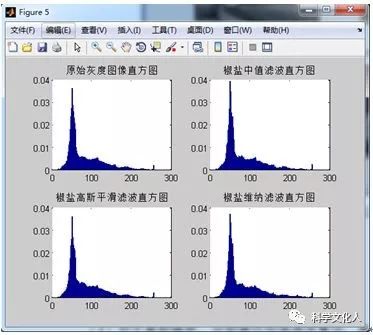
2-7去椒鹽噪聲直方圖
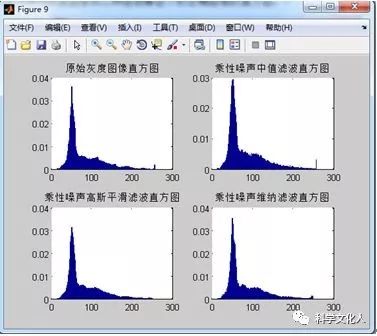
(2)對(duì)于高斯噪聲,分別通過(guò)中值濾波算法、高斯平滑濾波算法和維納濾波算法進(jìn)行去噪,可通過(guò)視覺(jué)觀察去噪效果。圖2-8給出了高斯噪聲在三種濾波算法處理下的結(jié)果。圖2-9為原始灰度圖像和三種濾波算法下的去噪圖像的直方圖。從圖2-8可以看出,維納濾波去除高斯噪聲較好,從圖2-9的直方圖比較中也可以看出。
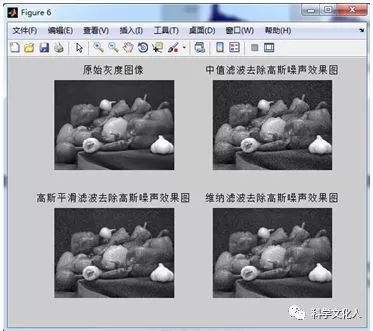
圖2-8去除高斯噪聲效果對(duì)比圖
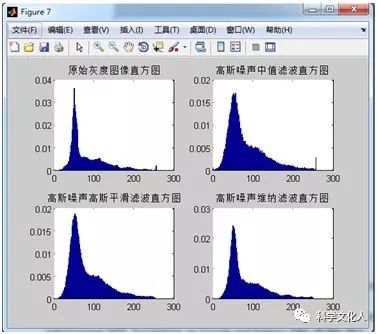
2-9去高斯噪聲直方圖
(3)對(duì)于乘性噪聲,分別通過(guò)中值濾波算法、高斯平滑濾波算法和維納濾波算法進(jìn)行去噪,可通過(guò)視覺(jué)觀察去噪效果。圖2-10給出了乘性噪聲在三種濾波算法處理下的結(jié)果。圖2-11為原始灰度圖像和三種濾波算法下的去噪圖像的直方圖。從圖2-10和圖2-11中可以看出,對(duì)于乘性噪聲,高斯平滑濾波和維納濾波算法均具有比較好的效果,而中值濾波要差一些。
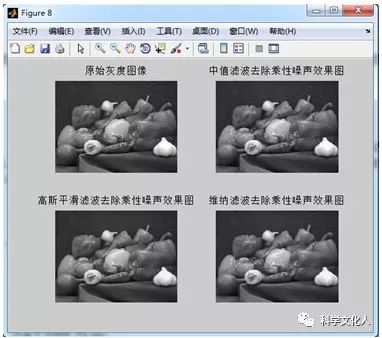
圖2-10去除乘性噪聲效果對(duì)比圖
2-11去乘性噪聲直方圖
從2.4.3節(jié)內(nèi)容可以得知對(duì)于不同的噪聲,不同的濾波算法有不同的處理效果,并且可以通過(guò)濾波效果圖和直方圖直觀看出。為了更具體和更具說(shuō)服力,我們通過(guò)可以通過(guò)計(jì)算圖像的峰值信噪比(PSNR)對(duì)圖像的恢復(fù)質(zhì)量進(jìn)行客觀而有效的評(píng)價(jià)。
峰值信噪比(Peak Signal to Noise Ratio,PSNR)是衡量圖像失真或噪聲水平的客觀標(biāo)準(zhǔn)。兩個(gè)圖像之間PSNR值越大,則越相似。PSNR定義式:
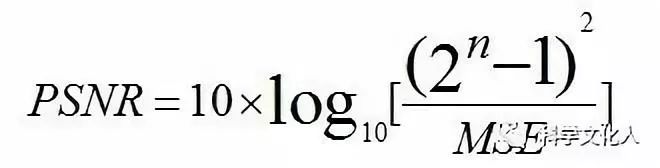
(2-5)
其中,n是每個(gè)采樣值的比特?cái)?shù),MSE是原圖像與處理圖像之間的均方誤差,PSNR的單位為dB。
3 結(jié)果分析
3.1濾波效果分析
通過(guò)前文2.4.3小節(jié)研究?jī)?nèi)容可知,對(duì)于椒鹽噪聲,采用中值濾波算法處理效果比較好;對(duì)于高斯噪聲,采用維納濾波算法處理效果比較好;對(duì)于乘性噪聲,采用高斯平滑濾波算法或維納濾波算法處理比較好。為了更客觀的比較,3.2節(jié)PSNR對(duì)比中精確描述。
3.2 PSNR對(duì)比
為了更加客觀描述圖像復(fù)原質(zhì)量的評(píng)價(jià),針對(duì)椒鹽噪聲、高斯噪聲、乘性噪聲,各自采用中值濾波算法、高斯平滑濾波算法以及維納濾波算法,得到相對(duì)的圖像復(fù)原結(jié)果,并通過(guò)Matlab程序計(jì)算PSNR,通過(guò)下面各表列出。
4 結(jié)論
通過(guò)前文的研究,對(duì)于一幅受到噪聲污染的圖像,通過(guò)常用的經(jīng)典濾波算法進(jìn)行復(fù)原,會(huì)產(chǎn)生不同的效果。對(duì)于椒鹽噪聲,采用中值濾波算法處理效果比較好;對(duì)于高斯噪聲,采用維納濾波算法處理效果比較好;對(duì)于乘性噪聲,采用高斯平滑濾波算法或維納濾波算法處理比較好。
需要注意的是,由于選擇讀取圖像的原因,經(jīng)過(guò)復(fù)原后的圖像計(jì)算出的PSNR值幾乎均未超過(guò)30dB,若更改為其他合適圖像,可以得到較高的PSNR值。
另外,經(jīng)過(guò)測(cè)試發(fā)現(xiàn),如果添加的噪聲濃度過(guò)大,則會(huì)導(dǎo)致濾波算法效果下降,降噪性能受到限制,需要對(duì)算法進(jìn)行改進(jìn),或者選用其他有效算法進(jìn)行圖像復(fù)原和增強(qiáng)。
考慮到研究深度,本設(shè)計(jì)只涉及基礎(chǔ)濾波算法在圖像復(fù)原中的應(yīng)用,未對(duì)更多改進(jìn)型有效算法展開(kāi)深入研究。通過(guò)本次設(shè)計(jì),為基本噪聲圖像復(fù)原技術(shù)提供了參考。
編輯:jq
-
濾波算法
+關(guān)注
關(guān)注
2文章
88瀏覽量
13710
原文標(biāo)題:基于經(jīng)典濾波算法的圖像復(fù)原技術(shù)研究
文章出處:【微信號(hào):zhuyandz,微信公眾號(hào):FPGA之家】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
PCB電路與結(jié)構(gòu)的EMC協(xié)同仿真技術(shù)研究
圖像識(shí)別算法都有哪些方法
圖像識(shí)別算法的優(yōu)缺點(diǎn)有哪些
圖像識(shí)別算法的核心技術(shù)是什么
圖像識(shí)別技術(shù)的原理是什么
基于振弦采集儀的工程安全監(jiān)測(cè)技術(shù)研究與應(yīng)用

電機(jī)控制中的噪聲抑制技術(shù)研究
凌科喜獲“廣東省工程技術(shù)研究中心”認(rèn)定

珠海中京電子成功獲得“廣東省電子電路工程技術(shù)研究中心”認(rèn)定
喜訊!諾安智能獲“廣東省工程技術(shù)研究中心”認(rèn)定

寬帶放大器在陣列渦流檢測(cè)技術(shù)研究中的應(yīng)用
振弦采集儀在巖土工程監(jiān)測(cè)中的應(yīng)用技術(shù)研究

詳解從均值濾波到非局部均值濾波算法的原理及實(shí)現(xiàn)方式
韓國(guó)宣稱已完成應(yīng)用機(jī)器人自主探索隧道的技術(shù)研究
莫之比《湖南省毫米波雷達(dá)工程技術(shù)研究中心》喜獲2023湖南省工程技術(shù)研究中心擬立項(xiàng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論