 SIL、HIL和車載測試
SIL、HIL和車載測試
作者:Eren Aydemir 和 Ersun Sozen,福特奧托桑福特奧托桑開發的自動泊車系統原型可簡化泊車操作,泊車速度比資深司機還快了一倍。即使對于擁有多年駕齡的司機而言,牽引掛車泊車也并非易事。引導掛車進入裝貨碼頭通常需要好幾步操作。如果是在擁擠狹窄、人來人往的城市街道上穿行,泊車更是難上加難(圖 1)。
為了幫助牽引掛車司機泊車,在福特奧托桑,我們的團隊開發了一個自動泊車系統的概念驗證原型。該模型運用了兩個軌跡規劃算法:一個是在歐盟 TrustVehicle 計劃框架內與英國薩里大學合作開發的人工勢場算法;另一個是由我們的內部團隊開發的 RRT* 算法,RRT* 是快速搜索隨機樹 (RRT) 的變體。在 Simulink 中對這些算法進行建模和仿真后,我們通過硬件在環 (HIL) 測試對其進行了驗證。然后,我們使用真實牽引車進行了測試。測試顯示,該原型簡化了泊車操作,泊車速度比資深司機還快了一倍。
牽引掛車和軌跡算法建模
我們的團隊有著為乘用車和機器人開發自動駕駛系統和機器人控制系統的經驗,但從未涉及牽引掛車這類大型車。另外,牽引車和掛車是鉸接在一起的,這使得控制系統設計更加復雜。借助基于模型的設計,我們得以對牽引車的動力學特性進行建模和可視化,并在開發和完善軌跡規劃和控制算法時考慮這些動力學特性。
我們基于 3DOF 自行車模型創建了一個簡化的車輛模型,用于表示縱向、橫向和橫擺運動。然后,我們使用牽引車輪胎質量等參數測量值對此模型進行配置。我們將控制系統的設計分成多個 Simulink 組件,由不同的開發團隊分工完成。比如說,有一個團隊負責軌跡規劃組件,實現 RRT* 算法或者人工勢場算法。另有一個團隊負責軌跡控制組件,比如計算適當的轉向角、制動扭矩和加速扭矩,以產生軌跡規劃組件所提供的預期橫擺角速度、減速度和加速度。該團隊最初將軌跡控制組件純粹作為追蹤控制器加以實現,但后來將其作為模型預測控制器重新實現,以適應更高的速度。 有一個組件實現了與感知子系統的接口,該子系統使用激光雷達和雷達來定位車輛附近的障礙物和構造。另有一些組件實現了針對以下各項的接口:在 Android 平板電腦上運行的監控 App、牽引車的 CAN 總線,以及我們的軟件在環 (SIL) 和 HIL 測試環境。
SIL、HIL 和車載測試
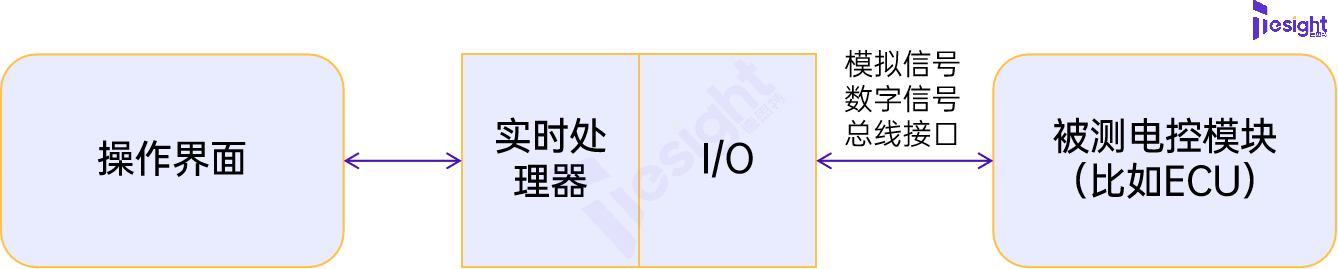
在 Simulink 中進行初始驗證仿真后,我們又在 SIL 和 HIL 環境中進行了更廣泛的測試。我們使用 Simulink Coder 從軌跡規劃和軌跡控制模型生成代碼,并運行了 SIL 測試,測試使用模擬的傳感器輸入、牽引掛車的動態模型以及環境模型。在 HIL 測試中,我們將軌跡規劃和控制算法部署到 dSPACE 目標硬件。借助 HIL 測試,我們在真車實測之前率先驗證了設計的實時性能,例如通過 CAN 和 UDP 進行的實時通信。 車載試驗是在位于土耳其埃斯基謝希爾的福特奧托桑 In?nü 測試軌道上進行的。我們在牽引車上安裝了 dSPACE 系統,用于運行從 Simulink 模型生成的代碼。在最初的幾次測試中,我們發現牽引車物理模型中某些參數的值不準確,比如側偏剛度。
對于某些情形,我們預想會需要至少兩三步操作,但牽引車事實上只用了一步就完成了泊車。盡管仿真已經向我們展示了這一可能性,但親眼所見仍使我們欣喜不已:在算法的引導下,牽引車泊車的效率勝于有著 15 至 20 年駕齡的司機。
今后的集成計劃
我們開發了高效的軌跡規劃和控制算法,并在真車上進行算法驗證,從而實現了這個項目的所有目標和關鍵性能指標。現在,我們已具備自動駕駛模式下鉸接式車輛泊車的自主技術。福特奧托桑同時還在開展另外幾項開發計劃,并且都要利用這一泊車功能,其中一項側重于停車場管理,另一項則關注牽引車遠程控制。我們期待將這一自動泊車系統集成到上述更大的生產系統中。
責任編輯:haq
-
車載
+關注
關注
17文章
603瀏覽量
83345 -
仿真
+關注
關注
50文章
4041瀏覽量
133413 -
模型
+關注
關注
1文章
3171瀏覽量
48711 -
自動駕駛
+關注
關注
783文章
13682瀏覽量
166144
原文標題:泊車速度比資深司機還快一倍?! 使用基于模型的設計開發自動泊車技術
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
汽車HiL測試:利用TS-GNSS模擬器掌握硬件性能的仿真藝術
基于V2X和自動駕駛HIL聯調的仿真測試系統開發

測試新體驗 | 車載網絡測試套件INTEWORK-ANTP

智駕仿真測試實戰之自動泊車HiL仿真測試

設計仿真 基于VTD的AR-HUD仿真測試解決方案

【干貨分享】硬件在環仿真(HiL)測試

應用案例分享 | 智駕路試數據分析及 SiL/HiL 回灌案例介紹

儲能BMS的HiL測試系統方案介紹
康謀方案 | 從概念到生產的自動駕駛軟件在環(SiL)測試解決方案
康謀方案 | 基于場景的端到端硬件在環(HiL)測試智能解決方案
中國HiL迎來產業化元年
車載電源測試有哪些測試要求?車載電源ate測試系統的流程是什么?
ADAS驗證的關鍵技術:HIL測試系統概述

如何通過HIL測試系統做ADAS驗證






 工商網監
工商網監
評論