 對于網格做盡量簡單化的應用技術揭秘
對于網格做盡量簡單化的應用技術揭秘
1、有限元分析的5大要素
對于有限元分析來說,支撐這個體系的4大要素就是:材料本構、網格、邊界和載荷(載荷問題可以理解為數學物理方程的初值問題),然后,如果把求解技術也看作一個要素,則也可以稱之為5大要素。
2、基本要素-網格
網格是一門復雜的邊緣學科,是幾何拓撲學和力學的雜交問題,也是支撐數值計算的前提保證。本文不做任何網格理論的探討(網格理論是純粹的數學理論),僅限于盡量簡單化的應用技術揭秘。
網格出現的思想源于離散化求解思想,離散化把連續求解域離散為若干有限的子區域,分別求解各個子區域的物理變量,各個子區域相鄰連續與協調,從而達到整個變量場的協調與連續。離散網格僅僅是物理量的一個“表征符號”,網格是有形的,但被離散對象既可以是有形的(各類固體),也可以是無形的(熱傳導、氣體),最關鍵的核心在于網格背后隱藏的數學物理列式,因此,簡單點說,看得見的網格離散是形式,而看不見的物理量離散才是本質核心。
對計算結構力學問題,網格剖分主要包含幾個內容:
桿系單元剖分(梁、桿、索、彈簧等);
二維板殼剖分(曲面或者平面單元);
三維實體剖分(非結構化全六面體網格、四面體網格、金字塔網格、結構化六面體網格、混合網格等);
計算熱力學和計算流體動力學的網格絕大部分是三維問題。對于CAE工程師而言,任何復雜問題域最終均直接表現為網格的堆砌,工程師的任務等同于上帝造人的過程,網格是一個機體,承載著靈魂(材料本構、網格、邊界和荷載),求解技術則是一個思維過程。
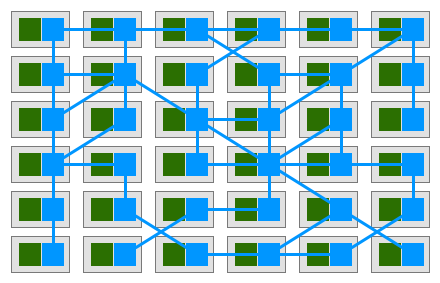
網格基本要素:
節點(node)
單元線(edge)
單元面(face)
單元體(body)
實質上,線、面、體只不過是為了讓網格看起來更加直觀,在分析求解過程中,線、面、體本質上并沒有起多大的作用,數值離散的落腳點在節點(node)上,所有的物理變量均轉化為節點變量實現連續和傳遞。在所有的CAE環境下,網格的基本要素均可以直接構成,但對于復雜問題而言,這是一個在操作上很難實現的事情,因此,基于幾何要素的網格劃分技術成為現代網格剖分應用的支點,和網格基本要素完全相同,對應的幾何要素分別稱之為點(point)、線(curve)、面(surface)和實體(solid)。
數值離散求解器是不能識別幾何元素的,要對其添加“飼料”,工程師必須對幾何元素進行“精加工”,因此,從這個意義上來說,網格剖分的本質就是把幾何要素轉換為若干離散的元素組,這些元素組堆砌成形態上近似逼近原有幾何域的簡單網格集合體。因此,這里說明了一個網格“加工”質量的基本判別標準——和幾何元素的擬合逼近程度,理論上,越逼近幾何元素的網格質量越好,當然,幾何逼近只是一個基本的判別標準,網格質量判別有一系列復雜的標準,本文不做討論。
3、網格類型
本文專門解釋幾個基本概念:點網格;一維線網格;二維三角形面網格、二維四邊形面網格;三維四面體網格(tetrahedra)、三維金字塔單元(pyramid)、五面體單元(prism)、三維六面體單元(hexahedra);結構化網格(structural grid)、非結構化網格(nonstructural grid)、混合網格(blend grid)。
需要專門說明的是,網格(grid & net)不等同于單元(element),單元是基于有限元思想的一個專用名詞,而網格則是網格理論體系下的專用稱呼,當網格用于有限元分析的時候,便可以轉而稱為線單元、面單元、實體單元,因此兩者的本質差別在于,單元具有物理意義,一般具有特定的物理列式,而網格只是純粹幾何意義上的基本元素。
3.1、點網格
主要針對CSD中的質量單元和CTD中的點狀熱源,通過對幾何point直接mesh生成,應用較為簡單,屬性也較為簡單,一般僅僅包含質量特性或者溫度特性。值得一提的是,在考慮行波效應的振動分析中,質量單元常被妙用,作為基底無限大質量塊,巧妙地將加速度激勵轉變為力激勵,從而達到可以多點施加激勵的作用。
3.2、一維線網格
主要針對計算結構力學問題,主要針對基本的桁架(truss)、梁(frame or beam)、索(cable)、連桿(link)和彈簧(spring)等工程單元。需要特別說明的是,link實際上沒有具體的工程構件對號入座(不等同于機械工程的連桿),只是一種單元節點物理量協調的邊界單元,常用一維線網格描述。對于梁系單元,理論上通過桿件軸長方向的node描述其物理量變化,node越多,描述相對越精確,對于常用的梁、桿通常達到6~9個節點就具備足夠的工程精度(可以捕捉到關鍵截面位置的力學響應)。一維單元可以根據內力變化隨意加密局部網格點。
從工程意義上來說,通過加密網格節點,完全可以替代高次一維單元。需要注意的是,桿系構件的一維網格并不是一味的追求增加剖分節點,對于桁架(truss)或者拉索(cable),當劃分成多節點一維網格時,如果構件缺少初始剛度(一般是初始張拉剛度),則中間節點會由于缺少轉動自由度約束,而形成類似鉸鏈的機構運動,導致計算失敗。而彈簧或者link則只需要兩個網格節點便可以完全描述其物理特性,這是最簡單的一維網格單元。
3.3、二維網格
主要針對CSD中的板殼單元、平面應力單元、平面應變單元;CTD和CFD中的二維問題也是其應用領域。二維網格包含兩類:其一是三角形網格;其二是四邊形網格,當然,兩種網格也可以混合使用。
三角形網格:一般用于線性二維單元(線性單元只有一個積分點,當然也有3積分點、4積分點的高次三角形單元),因此,精度一般相對較差,同時,單元數量和節點數量均較高,造成計算負荷加大,但其幾何逼近的適應性很好,因此對由復雜二維曲面構成的三維問題,有一定的適應性。
四邊形網格:是矩形、梯形、斜梯形等四邊形網格的總稱,四邊形網格單元容易增加單元積分點分布(4積分點、8積分點、9積分點、16積分點等),因此,對應單元的精度往往較高。但在其應用之初,限于網格生成技術的原因,對幾何域的擬合逼近不如三角形好,網格生成算法也較為復雜,影響了其使用,現在的網格技術已經完美解決這一問題,因此,理論上,任意復雜的曲面幾何域均可以采用完全四邊形網格構成。但對于很多復雜工程問題,往往存在一些幾何尺度變化較劇烈的區域(俗稱極短邊界、破碎面、破碎線),這些區域如果純粹用四邊形網格填充,會大幅度增加網格數量,且形狀逼近也不好,因此可以采用混合三角形——四邊形網格的剖分策略,這是一種兼顧網格形狀、計算效率和精度的網格組合方式,主要以四邊形單元為主,局部填充數量極少的三角形網格。
3.4、三維實體網格
三維實體網格是最復雜的網格技術,主要針對計算域中的塊狀體或者空間三維狀封閉區域,填充網格形狀包括四面體、六面體、棱柱體、四棱錐體(俗稱金字塔網格),目前的三維網格剖分技術已經相對完善,四面體網格可以高效填充任意復雜的空間三維域,很多網格生成軟件并且已經可以做到自動剖分、自適應加密。
最具挑戰性的三維六面體網格剖分技術仍然處于完善發展狀態,雖然理論上分塊(block)結構化網格可以實現任意形狀三維空間的結構化六面體網格填充,但復雜的分塊技術對工程師的幾何拓撲規劃能力是一個嚴重的挑戰,往往進行區域分塊會花掉工程師整個分析工作過程近80%的時間,同時,由于結構化要求,導致有時候網格質量難以控制,網格數量有時候可能比四面體單元的數量更加巨大,但結構化網格排序簡單明了,因此數值離散插值非常方便,往往用線形插值的求解精度就可以達到非結構化網格非線性插值的精度,且結構網格占用內存較低(單個結構化網格占用內存為四面體網格的4倍,但但其節點總數大約為四面體網格的1/6,因此總占用內存較低),因此,結構化網格仍然是網格高端技術的象征,目前,專業網格處理器ICEM-CFD主要以這種技術為主,在CFD和CTD計算領域,結構化網格仍然是網格剖分的首選。
針對結構化網格生成技術的難點,非結構化六面體網格逐漸形成CSD領域的主流,非結構化六面體網格的主要生成技術是sweep技術,sweep網格要求剖分區域具有sweep路徑和路徑兩端的邊界面,網格生成的一般順序是先完成路徑斷面的網格剖分(程序自動完成,很容易),接下來程序往往會自動搜尋出端面的網格影射關系,從而沿著sweep路徑形成三維體網格。針對復雜幾何區域,非結構化網格也需要預先進行幾何域分塊,但其分塊難度相對很低,一般僅需要工程師尋找出具備近似sweep拓補特征的幾何域,直接進行幾何域剖分即可。
最簡單的具備近似sweep拓補特征的幾何域包括圓柱體、立方體以及經過異化(梯形化、扭曲化、楔化等)的對應元素,這些分區塊共同構成網格剖分的初始幾何子域集。
值得一提的是,幾何域初始剖分過程中各個子域需要保證幾何上的連通,對于非常復雜的幾何域,這樣的連通有些時候是高階復連通過程,其剖分也比較復雜。
棱柱體不是網格主流形狀,一般作為非結構化六面體網格的補充搭配使用——當sweep端面不適合采用全四邊形網格填充時,可以局部采用三角形網格——三角形網格沿厚度方向掃略便形成了棱柱體單元(5面體);棱柱體網格另外一個重要的用途便是流場計算的壁面邊界層網格,因為流場壁面法向附近變量變化非常劇烈,因此往往要求沿法向網格具有結構化特征,利于數值離散插值,提高計算精度,而如果該區域是非結構四面體單元,要形成結構化排序是非常困難的,因此,一個折中的方案便是對壁面附近四面體網格進行層狀化劈分處理(涉及劈層以后的局部網格重構,技術難度很大),經劈分處理得到表層網格便是棱柱體網格。
金字體網格在CSD領域應用較少,主要用于CTD和CFD計算——比如某一個幾何子域采用四面體網格,另外的子域采用六面體結構化網格,則在兩個子域上可以采用金字塔單元進行過渡處理,一般“塔底”(四邊形)連接六面體網格,“塔尖”連接四面體網格。
3.5、結構化網格和非結構化網格
這兩者只是針對網格排序方式而言,簡單點說,當幾何域內部的每一個子域上,其網格針對子域的面或者邊線,具有一一對應的網格排序(比如四邊形的對邊網格具有映射關系,且這樣的影射關系在網格路徑上也嚴格滿足),一個最簡單的例子,便是一個方柱體sweep六面體網格和結構化網格的對比,當路徑端面網格上為自由劃分四面邊形網格(端面的對邊方向網格并不具備映射關系)最終形成的sweep網格便是非結構化網格——沿網格路徑方向具有映射關系(最終全部是六面體),結構化網格則要求其端面網格也同時滿足映射關系(即使這個映射關系經過異化,比如梯形化、扭曲化)。
因此,總結來說,結構化網格在空間子域內部滿足三維映射,而非結構化網格最多只滿足一維映射(sweep網格),同時,四面體、棱柱體、金字塔網格也均屬于非結構化網格。
網格節點和積分點是普通CAE工程師很容易混淆的概念,網格節點構成了網格分布和形狀,通常,這些節點是數值離散插值、網格“溝通交流”的“基地”,而積分點一般位于網格內部或者節點之間,是“基地”傳輸過來的變量信息進行“再加工”(積分計算)的“封裝測試車間”,最后的結果是積分點計算結果通過插值“回退”到節點上的結果,要增加積分點,要求單元至少是2節點一維桿系單元,同時,2節點單元可以具備2個積分點、3個積分點、4個積分點甚至更多,二維3節點單元(3角形單元)、4節點單元、4節點實體單元、5節點實體單元(金字塔單元)、6節點實體單元(棱柱體單元)、8節點實體單元(六面體單元)也具有類似的屬性。
通常說的高次單元和線性單元的區別主要體現在積分點的區別上,高次單元理論上具有更高的精度,但對塑性問題不合適。工程上常常通過增加網格數量和節點數量來提高線性單元的計算結果精度。
編輯:fqj
-
網格
+關注
關注
0文章
139瀏覽量
16000 -
CAE技術
+關注
關注
0文章
8瀏覽量
6926
發布評論請先 登錄
相關推薦
廣電計量入選2024商業航天與應用技術創新學術優秀成果
利用自適應網格細化功能自動生成最佳網格

探秘低功耗電動云臺驅動板方案的應用技術

服務網格DPU卸載解決方案
采用笛卡爾網格的積鼎Virtualflow,如何平衡CFD模擬的精度與效率?

揭秘工業路由器:讓工業自動化更高效!

達索系統3DEXPERIENCE WORKS 2024流體仿真功能增強
CFD 設計利器:結構化和非結構化網格的組合使用





 工商網監
工商網監
評論