 基于3D打印機中推動步進電機的極限控制
基于3D打印機中推動步進電機的極限控制
原理:
在3D打印領域,新手通常很難理解步進電機的真正驅動方式,比如不少工程師會問這樣的問題“我的電機額定電壓是4.6V,但是我的打印機有12/24V電源,我可以使用它嗎?”。
這是因為我們每天使用的大多數電子產品都使用恒壓可變電流電源,這就是我們過去的認知。一個12V的LED燈帶將由一個穩定的、可控的12V供電,電流消耗將隨著二極管數量(負載)的增加而增加。
步進電機以相反的方式供電-電流是恒定的/可控的(稍后再詳細說明),所需的電壓隨負載變化而變化。這就是為什么在3D打印中12V電源被24V甚至更高電壓的電源所取代---因為(除了其他好處之外)采樣這種方式打印機可以為電機提供更高的能量,達到更高的運動速度和更好的動態效果,盡管電機的電流保持在同一數值。
但是典型的電源提供恒定的電壓,它是如何轉換為調節、控制電流的?這是步進電機驅動器的工作,比如TMC2208。

電流調節是通過一種叫做PWM的技術實現的(脈寬調制)。電壓是可以通過使用MOSFET實現非常快速的打開和關閉,以致電流在一個所需的水平浮動。但這種電流控制方法不適用于簡單的電阻負載--電流調節只能在驅動線圈和磁鐵或其他線圈一起使步進電機旋轉時實現。
線圈-電感-有一個有趣的特性---它“減緩”了電流,為其加上“慣性”。這意味著,如果施加電壓,流過電感的電流不會立即上升,而是緩慢上升。當電壓被切斷時,同樣的事情還會發生——電流不會立即降到0A,而是會隨著時間的推移而減少。
順便說一下,LED實際上也是電流控制的---但對于一個簡單的LED燈帶來說,一個電阻就足以調節電流,所以最終LED燈帶可以看作一個恒壓設備工作。
實際測量
在實際測量中可以清楚地看到所描述的電流控制方法:
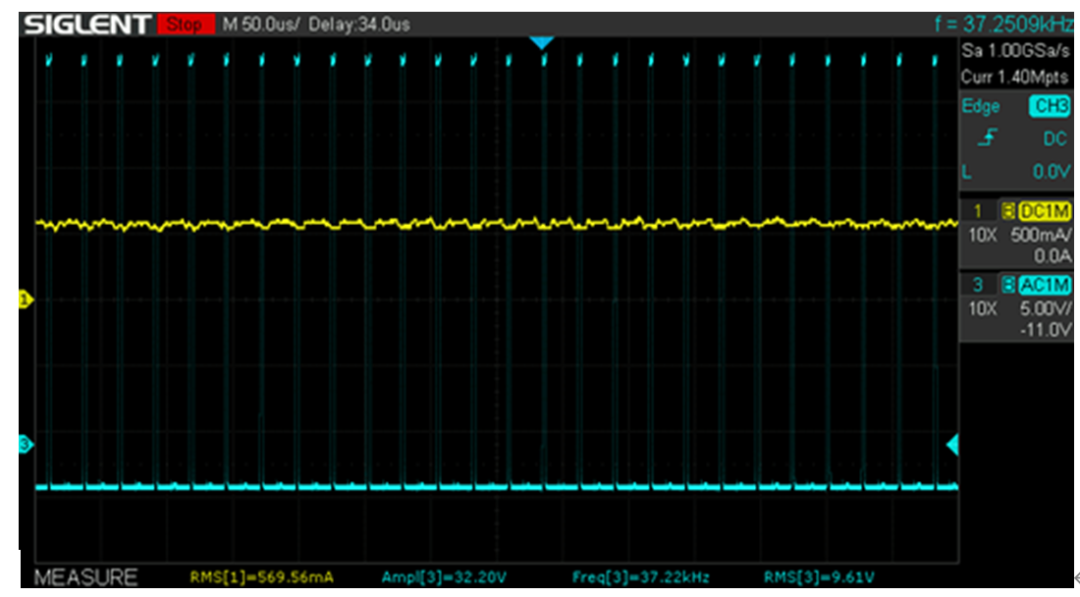
黃色曲線表示通過電機線圈的電流,青色線表示正在接通/斷開的電壓。該測量是在待機期間進行的,此時電機不旋轉,但保持其位置。電流幾乎是恒定的,電壓有規律地在短時間內打開,然后再關閉。請注意,這種切換正在發生超過30000次每秒!
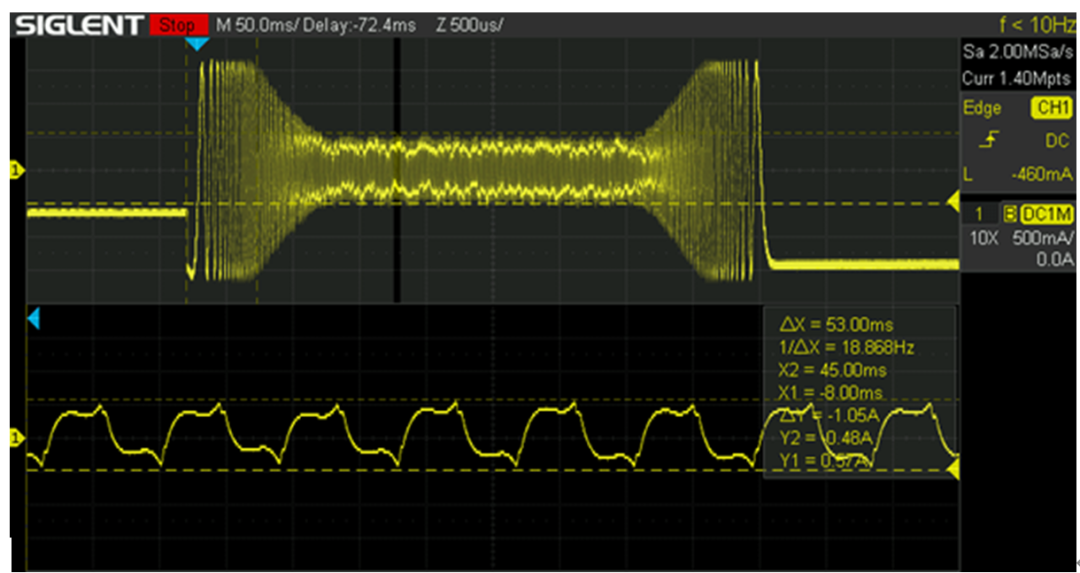
當馬達開始運動時,有趣的事情就發生了,電流波形的形狀不再是平的,它是正弦波。要使電機旋轉,電流需要改變以改變勵磁磁場,從而產生運動。這一原理適用于所有無刷電機。TMC2208用來主動測量和調節電流,生成一個具有設定幅值的正弦電流形狀,有效電壓相應地變化。旋轉速度取決于當前正弦波的頻率。
不用擔心電壓測量的波動。幅值-在屏幕底部看到或多或少等于我們使用的電源電壓32V。RMS值是傳送到電機線圈的“多少”有效電壓的指標。在這種情況下,測量/計算值不是很精確,但它表明在這個速度下,我們提供的電壓低于標稱電源電壓的40%。
當我們放大時,我們可以清楚地看到前面提到的電感的特殊性質:
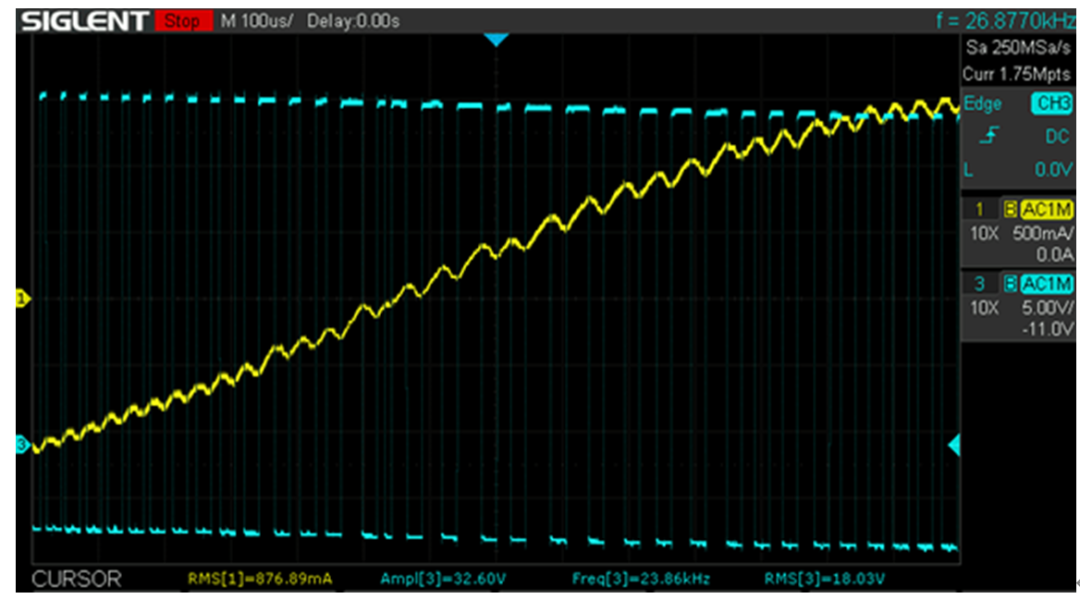
當電壓打開時,電流上升,但與電壓上升/下降的速度相比相當緩慢。當我們關閉電壓時,流過線圈的電流下降,但還是相當緩慢。在它達到過低之前,驅動器再次打開電源,電流再次上升。
這基本上就是我們如何保持電流在所需的水平的方法,另請注意,MOSFET 開關導通的時間(電壓保持導通的時間)取決于正弦波上的“位置”。當我們查看正弦波時,我們可以看到變化緩慢(靠近頂部/底部)和變化較快(Y 軸上接近零)的區域。如果我們希望電流遵循這種形狀,我們只需要在正弦波的“快速區域”中施加更長時間的電壓!
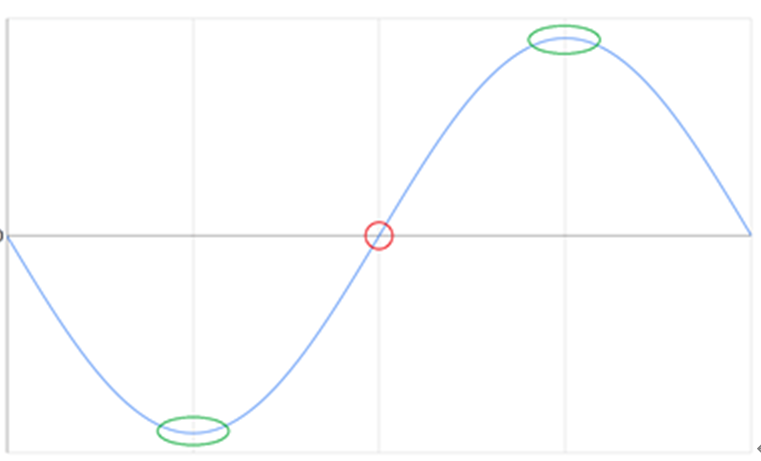
微小的不規則性、與理想、平滑的正弦形狀的偏差被稱為紋波,并且在使用 PWM 控制線圈電流時總是存在。
電機負載的影響
在這一點上一個非常重要的問題出現了-是什么導致所需電壓(提供給電機的實際功率)隨負載變化而變化?這就是BEMF------每臺電機固有的特性。我不想在本文中深入探討這種現象的物理細節-–簡單地說,旋轉期間的電機線圈會產生“反”電壓,該電壓與我們從電源施加到電機的電壓相反,這就是為什么它被稱為反電動勢。速度(或負載)越高,我們需要對抗的BEMF就越高。
BEMF受三個主要因素的影響:
? 電機線圈電感——越小越好
? 設置電流 - 電流越高,電機越強,但產生的 BEMF 也是如此
? 速度/機械負載——當然,BEMF 會隨著負載的增加而增加。這就是使用Trinamic StallGuard 的無傳感器歸位的工作原理——它測量 BEMF!
BEMF的實際影響:
在下面的測量中,我們可以看到加速移動和兩個區域的特寫——低速/高速
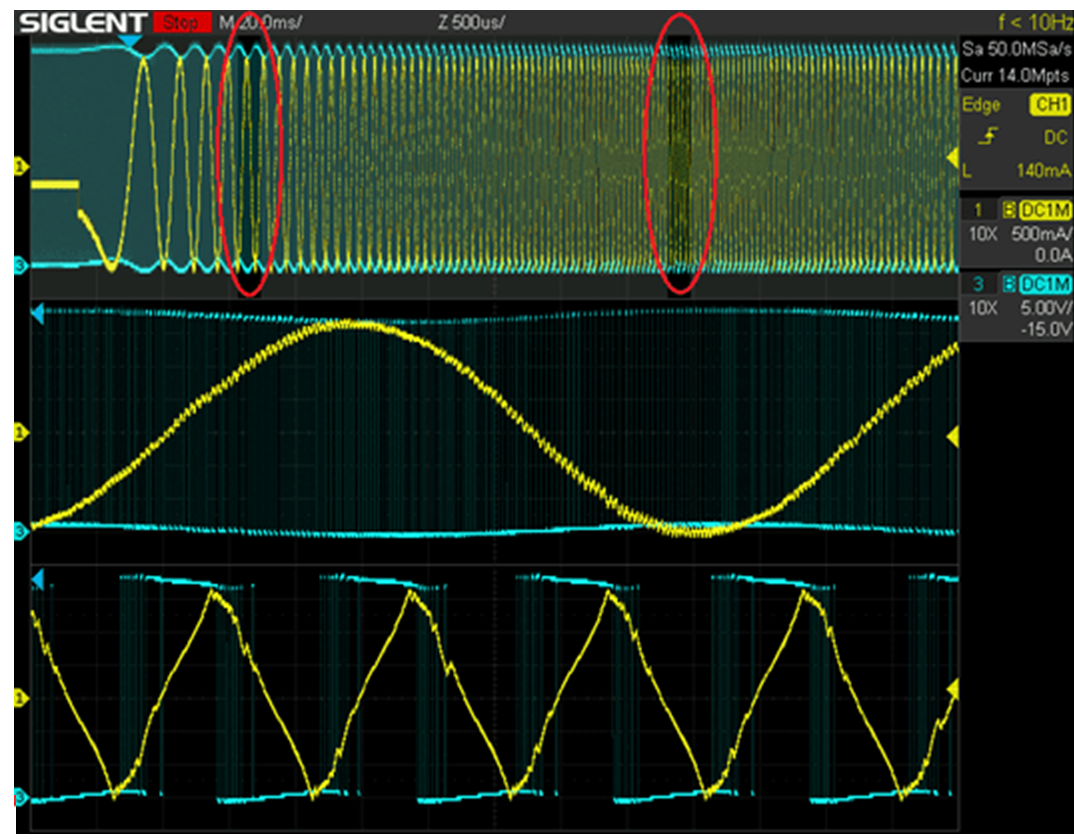
當速度仍然很低時,電機控制器仍有足夠的余量來很好地調節電流,因此可以認為正弦波是理想的。但如果我們稍后再放大一些,我們可以看到電流看起來更像一個三角形,并且施加的電壓不是很精確。那是因為控制器沒有電壓余量來正確調節電流,實際上,雖然電機仍在運行,但正弦波會失真。
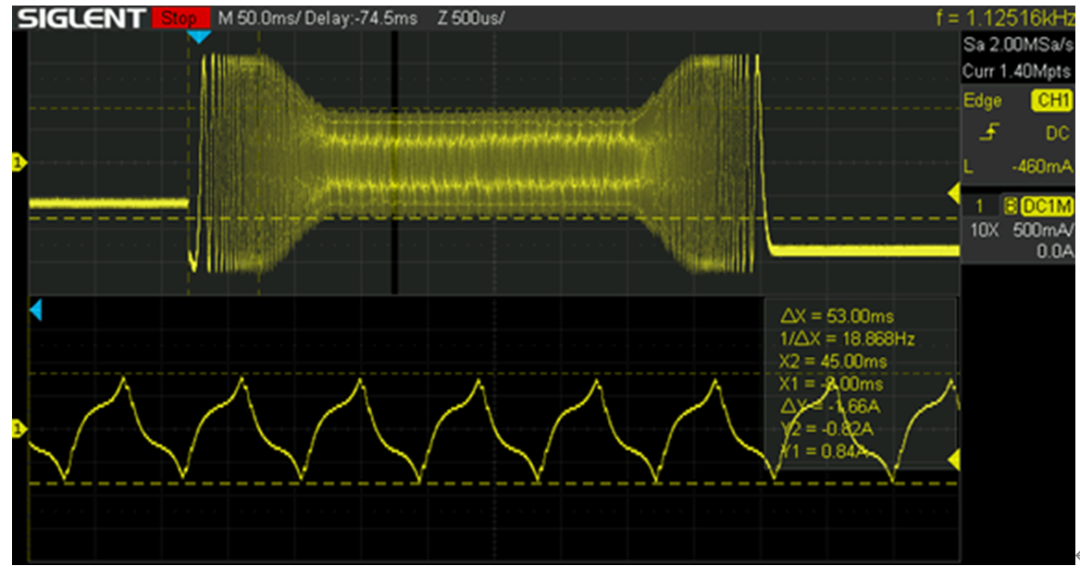
現在我們了解了如何控制步進電機,我們可以進入下一點并回答最后一個問題——當 BEMF 如此之高以至于與電源電壓接近時會發生什么?您可能會猜測電機將開始失步——的確這樣,但不會立即出現!老實說,我對驅動器和電機處理極端速度的能力感到驚訝。讓我們來看看:
這是使用 24V 電源在一個完整運行期間流過電機線圈的電流。打印機從靜止狀態開始,然后以 9000 mm/s2 的速度加速到 900 mm/s,最后停止。那么,實際發生了什么?一開始,驅動器能夠保持一個正弦波,但稍后,當 BEMF 接近電源電壓時,波形會變差,正如我們在上面看到的那樣。但此時打印機仍然沒有達到所需的速度——很快電機產生的反電動勢電壓太高,以致不可能達到設定的電流值,它下降,直到達到所需的速度,然后振幅變得穩定,但我們不再看到正弦波——在這一點上,它更接近于方波。
這些結果看起來很糟糕,但實際上——結果還好!機器在這樣的設置下運行一年多也不會有問題。在高速應用中,這是很正常的。當然,扭矩大大降低,精度可能不太完美,但減速后,電機恢復標稱扭矩,位置精準。900mm/s 是我在開始失步之前認為安全的最大速度。
我還嘗試使用來自示波器的原始數據來計算和顯示操作期間的平均“電壓消耗”。
事實證明這比我預期的要難一些,所以結果只是指示性的——這就是為什么沒有提供數字的原因。反正:
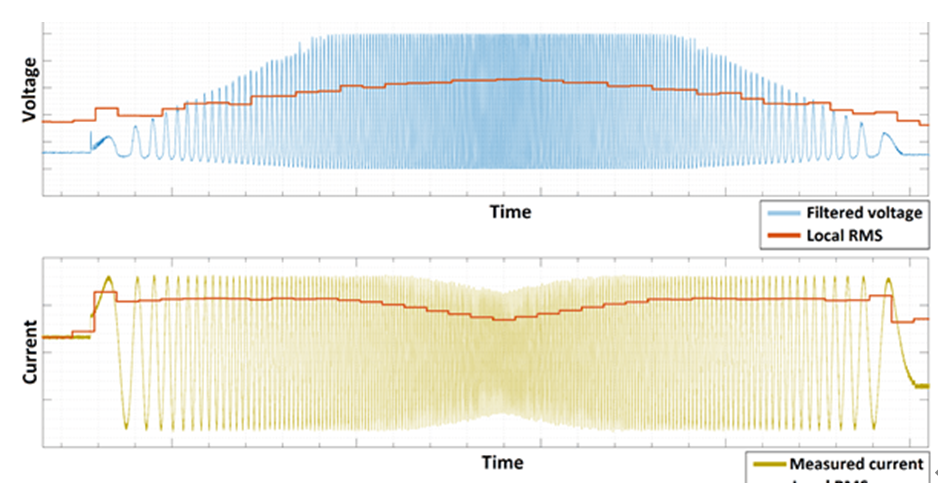
兩幅圖以“Local RMS”表示電壓和電流,這或多或少是平均有效值。
我們可以看到,隨著速度的增加,我們需要施加越來越多的電壓,直到達到極限,此時電流會下降一點。從這些圖表中得出兩個重要結論:
? 我們永遠無法提供 100% 的電源電壓,因為我們需要改變電流 -》 我們需要一些時間讓它下降。
? 在高速情況下,我們無法為電機提供全功率。
更高的供電電壓的好處
可能一些人可能已經意識到,在大多數測量中,我使用的是 32V,而不是 24V 電源。確實如此——我將我的機器升級到了 32V,這就是為什么我決定玩弄我的示波器并比較這兩種選擇。
它值得嗎?確實!
使用之前的設置參數,波形形狀看起來好多了,電流幅度比以前高約 60%,這意味著再電機開始丟步之前有更好的穩定性和更高的余量。另一方面,我可以以相當高的加速度進行打印,甚至達到 1200 毫米/秒的速度,而不是更高的安全余量!并不是說它對FDM打印機有多大意義。。。。。。但我對結果非常滿意。
總結和建議!
即使是幾伏的差異也會改善我們步進電機驅動器的操作或讓我們達到更高的速度。有時更高的打印速度會導致打印質量下降,但這通常不是什么大問題,至少我們可以提高行進速度,這不僅會減少打印時間,而且還有助于回縮調整。
憑借我們獲得的所有知識,現在我們可以更自信地為我們的機器選擇電機。所以:
確保電機額定電感和電阻盡可能的低
對于像TMC2208 或 TMC2130 這樣的驅動器,額定電流為1.5-1.7A電機應該是最佳的
對于 TMC2209、TMC2660 和 TMC51X0,額定電流為2.0 – 2.5A 電機即可
選擇盡可能高的電機電源電壓,但要仔細檢查您的驅動器和主板的額定值!
就我個人而言,我認為在接下來的幾年里,我們將看到越來越多的 36V 和更高版本的 48V 主板用于Reprap/商業 3D 打印機,因此我們的機器變得越來越好,并且可以利用的速度會提升。唯一的缺點是加熱器通常設計為 24V - 但也許這也會改變!
使用到的儀器:
Silent SDS 1104X-E 示波器
HANTEK CC65電流探頭
150W明緯電源
CoreXY 3D 打印機
定制 TMC2208 驅動板
編輯:jq
-
led
+關注
關注
242文章
23141瀏覽量
658539 -
示波器
+關注
關注
113文章
6194瀏覽量
184527 -
電流探頭
+關注
關注
0文章
431瀏覽量
13271 -
3D打印機
+關注
關注
9文章
523瀏覽量
44072
原文標題:在3D打印機中推動步進電機的極限控制
文章出處:【微信號:TRINAMIC_GW,微信公眾號:TRINAMIC電機驅動控制系統】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

3D打印機優化:ARMxy嵌入式計算機的作用

應用在3D打印機的BD系列金屬連接器
Klipper固件的打印機可以插卡打印嗎?
2024年含直線電機3D打印機在內共出口182.9萬臺

我用香橙派做了一個Klipper 3D打印控制器
TMC2209電機驅動芯片在3D打印機中被廣泛采用
UltiMaker正式推出了工業級3D打印機—UltiMaker Factor 4


YXC晶振 32.768KHz石英振蕩器,封裝3225,應用于3D打印機
能入3D打印機法眼,BD系列工業級連接器究竟有哪些獨特之處?

并聯式3D打印機的設計與計算





 工商網監
工商網監
評論