") 簡(jiǎn)述ADC采樣積分方式的BLDC方波無(wú)感控制的原理
簡(jiǎn)述ADC采樣積分方式的BLDC方波無(wú)感控制的原理
Other Parts Discussed in Post:TIDA-010031
作者:Hardy Zhou
本文主要參考了TIDA-010031參考設(shè)計(jì),分析下ADC采樣積分方波無(wú)感控制的原理,方便大家更好地完成類(lèi)似的方案設(shè)計(jì)。
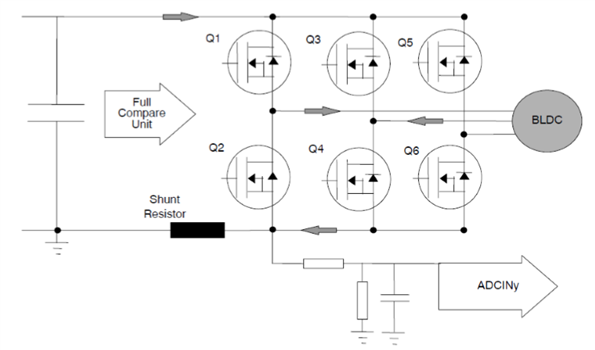
三個(gè)半橋驅(qū)動(dòng)BLDC無(wú)刷電機(jī),檢測(cè)低邊總線電流
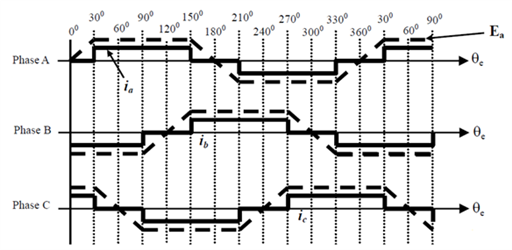
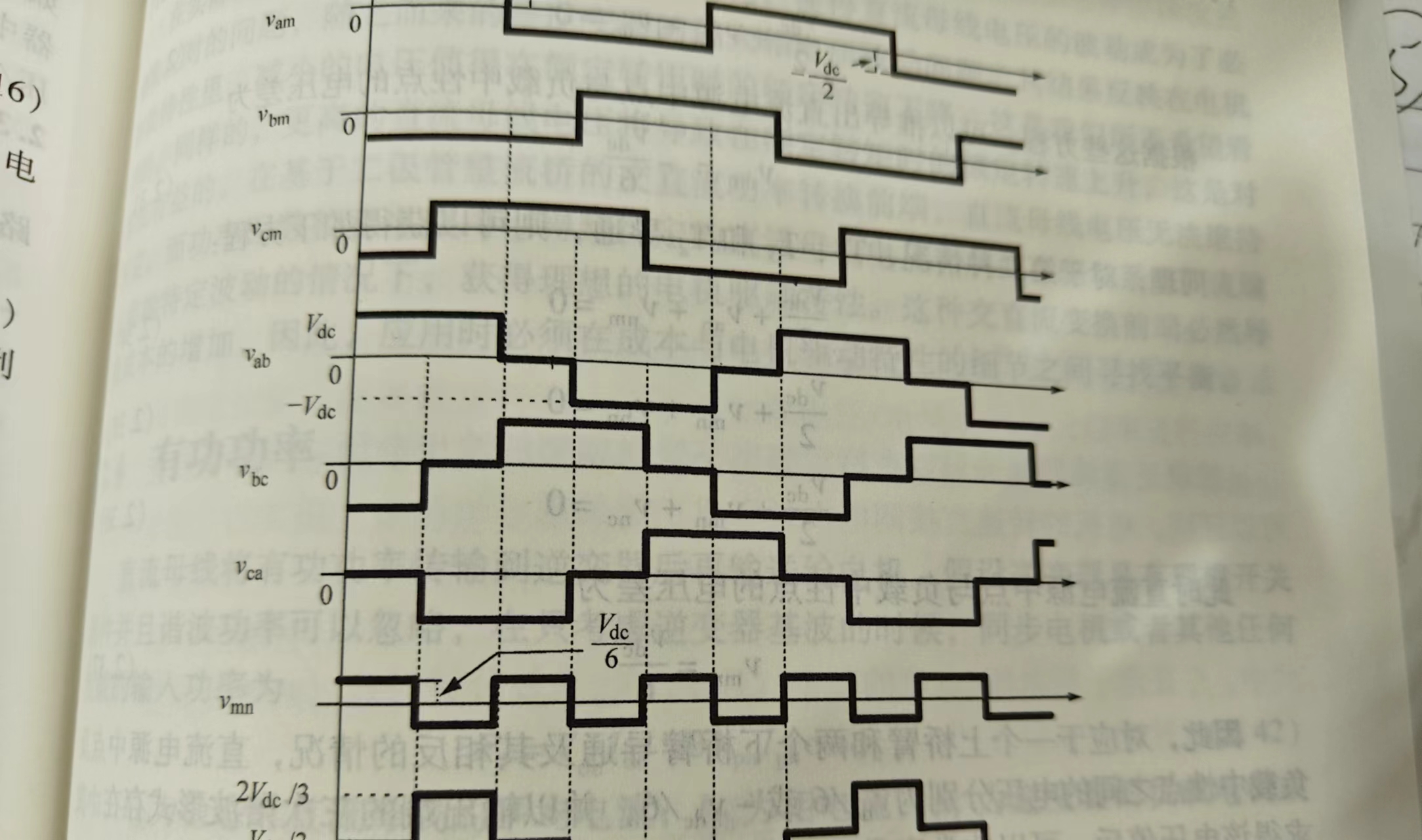
2.典型的BLDC電機(jī)相電流和反電動(dòng)勢(shì)波形圖分析
從波形上看,每60度電角度,只有兩個(gè)半橋有驅(qū)動(dòng)電壓輸出,另外一個(gè)半橋上下管全關(guān),這個(gè)相電壓是懸浮態(tài)。
BLDC電機(jī)運(yùn)行后,相線都有反電動(dòng)勢(shì)。
電機(jī)反電動(dòng)勢(shì)來(lái)源于電機(jī)轉(zhuǎn)子旋轉(zhuǎn)引起磁通的變化,而磁通的變化在定子繞組上會(huì)產(chǎn)生感應(yīng)電壓。
對(duì)同一個(gè)電機(jī)來(lái)說(shuō),反電動(dòng)勢(shì)峰值跟電機(jī)轉(zhuǎn)速幾乎是固定的比例。
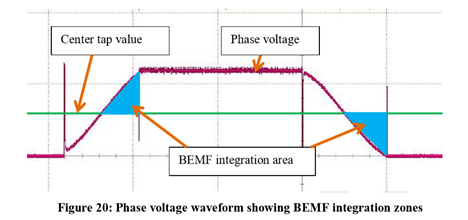
3.反電動(dòng)勢(shì)過(guò)零點(diǎn)到峰值的反電動(dòng)勢(shì)電壓和時(shí)間的積分
根據(jù)上面對(duì)反電動(dòng)勢(shì)峰值跟轉(zhuǎn)速(電頻率)幾乎成固定比例的描述,設(shè)定 。Vm為反電動(dòng)勢(shì)峰值, 對(duì)于同一個(gè)電機(jī),我們可以認(rèn)為Kv幾乎不變。
。Vm為反電動(dòng)勢(shì)峰值, 對(duì)于同一個(gè)電機(jī),我們可以認(rèn)為Kv幾乎不變。
以上圖左邊的藍(lán)色區(qū)域?yàn)槔搮^(qū)域(反電動(dòng)勢(shì)過(guò)零點(diǎn)時(shí)刻到下一次換相點(diǎn)時(shí)刻之間的區(qū)域)的電角度是30度,也就是電角度(360度)的1/12。
設(shè)當(dāng)前電機(jī)電頻率為f, 單位為Hz。
反電動(dòng)勢(shì)的峰值電壓為 ,單位為伏特。
,單位為伏特。
設(shè)反電動(dòng)勢(shì)從center tap value到最大值的時(shí)間為t1, 而 。
。
那么藍(lán)色積分區(qū)域的積分值就等于藍(lán)色三角形的面積:

可以看到,積分結(jié)果是Kv值的 ,因此積分結(jié)果也是幾乎不變的。
,因此積分結(jié)果也是幾乎不變的。
所以我們可以根據(jù)積分的值跟固定閾值作比較來(lái)判斷換相點(diǎn)。
4.ADC如何采樣反電動(dòng)勢(shì)
方波無(wú)感BLDC的ADC采樣積分控制,電路設(shè)計(jì)有三相相電壓ADC采樣電路,每60度電角度區(qū)間電機(jī)的兩相由于半橋有輸入電壓同時(shí)有電感電流,在不增加額外電路的情況下很難獲得反電動(dòng)勢(shì)電壓,而懸浮相由于沒(méi)有半橋電壓輸入和電感電流,所以可以從檢測(cè)該相端電壓推導(dǎo)出該相實(shí)際的反電動(dòng)勢(shì)電壓,具體可以看下面的推導(dǎo),推導(dǎo)過(guò)程參考了TI的參考設(shè)計(jì)TIDA-010031 http://www.ti.com/lit/ug/tiduej4/tiduej4.pdf?ts=1588819919326
所以如果對(duì)這個(gè)電機(jī)控制方法感興趣的,可以在TI官網(wǎng)上查看該參考設(shè)計(jì)的軟硬件開(kāi)發(fā)資料。
設(shè)計(jì)上采用下管常開(kāi),上管打PWM的策略驅(qū)動(dòng)電機(jī)。考慮到電機(jī)驅(qū)動(dòng)的PWM duty的大小是變化的,可以根據(jù)半橋上管ON的時(shí)間長(zhǎng)短來(lái)決定采樣策略,因?yàn)槿绻瞎軐?dǎo)通時(shí)間太短,為了避開(kāi)MOSFET開(kāi)通關(guān)斷的影響,留給采樣的時(shí)間就變得很少,不利于采樣的準(zhǔn)確性.
在上管ON的時(shí)間比較長(zhǎng)時(shí),在上管ON時(shí)遠(yuǎn)離MOSFET開(kāi)關(guān)時(shí)刻檢測(cè)懸浮相的反電動(dòng)勢(shì)電壓(一般在ON時(shí)間的正中間進(jìn)行采樣)。
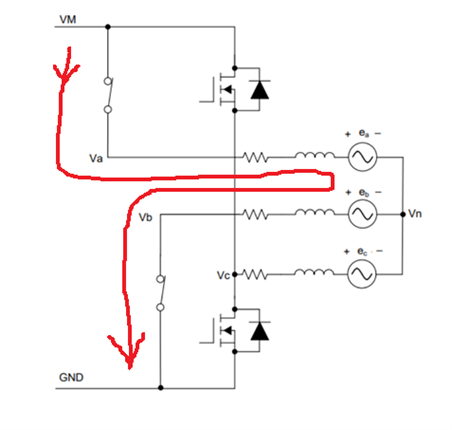
此時(shí)的驅(qū)動(dòng)邏輯是A相上管導(dǎo)通,B相下管導(dǎo)通, 所以有 。
。
Ea, Eb, Ec為電機(jī)三相反電動(dòng)勢(shì)電壓,va, vb, vc為三相半橋中點(diǎn)電壓,也就是電機(jī)三相輸入電壓。
La, Lb, Lc為電機(jī)三相相電感,ia, ib,ic為電機(jī)三相輸入電流,Ra, Rb, Rc為電機(jī)三相輸入電阻(考慮三相電阻相等), vn為電機(jī)三相中點(diǎn)電壓。
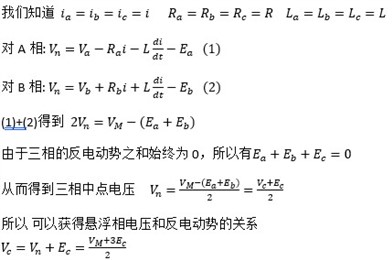
可以得到當(dāng)Ec=0,也就是反電動(dòng)勢(shì)過(guò)零時(shí), , 也就是說(shuō)當(dāng)ADC檢測(cè)到時(shí),就意味著這個(gè)時(shí)刻是C相的反電動(dòng)勢(shì)過(guò)零點(diǎn), 那么理論上再經(jīng)過(guò)1/12 的電周期時(shí)間,電機(jī)就需要進(jìn)行換向.
, 也就是說(shuō)當(dāng)ADC檢測(cè)到時(shí),就意味著這個(gè)時(shí)刻是C相的反電動(dòng)勢(shì)過(guò)零點(diǎn), 那么理論上再經(jīng)過(guò)1/12 的電周期時(shí)間,電機(jī)就需要進(jìn)行換向.
上管ON的時(shí)間比較短時(shí),在上管OFF時(shí)檢測(cè)懸浮相的反電動(dòng)勢(shì)電壓(一般在OFF時(shí)間的正中間進(jìn)行采樣)
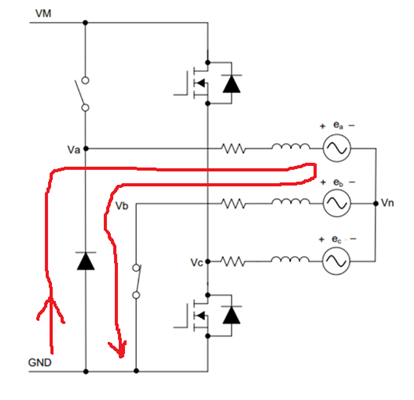
此時(shí)的驅(qū)動(dòng)邏輯是A相上管關(guān)閉,B相下管仍導(dǎo)通,此時(shí)A相下管MOSFET體二極管續(xù)流,所以有 。
。

得到當(dāng)Ec=0,也就是反電動(dòng)勢(shì)過(guò)零時(shí),vc=0, 也就是說(shuō)當(dāng)ADC檢測(cè)到vc=0時(shí),就意味著這個(gè)時(shí)刻是C相的反電動(dòng)勢(shì)過(guò)零點(diǎn), 那么理論上再經(jīng)過(guò)1/12的電周期時(shí)間,電機(jī)就需要進(jìn)行換向.
從上面的分析,我們可以看到,使用ADC采樣積分方式進(jìn)行無(wú)感BLDC控制,設(shè)計(jì)上需要注意以下兩點(diǎn)
積分閾值跟電機(jī)的反電動(dòng)勢(shì)峰值和轉(zhuǎn)速比值相關(guān),可能會(huì)隨著電機(jī)不同而不同,需要針對(duì)電機(jī)進(jìn)行調(diào)整。
上管做PWM驅(qū)動(dòng)的設(shè)計(jì)下, 可以采用不同的ADC采樣策略來(lái)針對(duì)大duty和小duty的情況,同時(shí)反電動(dòng)勢(shì)過(guò)零點(diǎn)的判斷也需要調(diào)整
電機(jī)高速情況下,電頻率相對(duì)比較高,而ADC積分采樣基于PWM開(kāi)關(guān)周期采樣的,所以要獲得比較準(zhǔn)確的換相點(diǎn),需要比較高的開(kāi)關(guān)頻率,如果開(kāi)關(guān)頻率比較低,意味著采樣速率慢,可能會(huì)造成換相延遲比較大,從而影響電機(jī)的正常控制。
審核編輯:金巧
-
MOSFET
+關(guān)注
關(guān)注
146文章
7101瀏覽量
212767 -
adc
+關(guān)注
關(guān)注
98文章
6452瀏覽量
544142 -
模擬
+關(guān)注
關(guān)注
7文章
1422瀏覽量
83897 -
BLDC
+關(guān)注
關(guān)注
205文章
795瀏覽量
96749
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
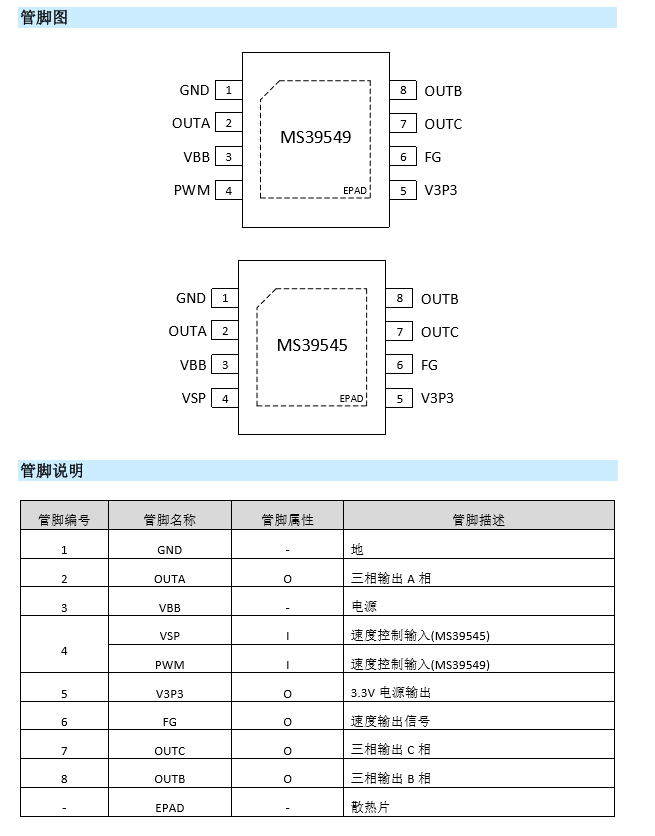
MS39549 三相無(wú)感正弦波 BLDC 驅(qū)動(dòng) 替代A4949
ADC3664EVM的采樣時(shí)鐘和DCLKIN都是方波,請(qǐng)問(wèn)可以是正弦波嗎?
BLDC方波控制與PMSM正弦波控制的區(qū)別

BLDC電機(jī)的無(wú)傳感器梯形控制

過(guò)采樣提高12位ADC的精度
ACM6754 24V/4.8A三相無(wú)感無(wú)刷直流BLDC電機(jī)驅(qū)動(dòng)芯片方案
BLDC無(wú)感無(wú)刷電機(jī)初始位置檢測(cè)
求一種基于CW32的無(wú)刷直流空心杯電機(jī)無(wú)感方波控制驅(qū)動(dòng)方案

基于CW32的無(wú)刷直流空心杯電機(jī)無(wú)感方波控制驅(qū)動(dòng)方案
請(qǐng)問(wèn)無(wú)感BLDC的FOC控制中觀測(cè)器G1和G2參數(shù)如何確定?
無(wú)感FOC無(wú)刷直流電機(jī)全集成驅(qū)動(dòng)芯片-XM2619產(chǎn)品概述
使用MOTOR PILOT驅(qū)動(dòng)無(wú)感BLDC總是報(bào)錯(cuò),如何解決?
TLE9893如何驅(qū)動(dòng)無(wú)感BLDC?
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車(chē)電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專(zhuān)欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論