") 如何將位置編碼器主協(xié)議集成到Sitara?處理器應(yīng)用
如何將位置編碼器主協(xié)議集成到Sitara?處理器應(yīng)用
如果您一直關(guān)注我的多協(xié)議工業(yè)以太網(wǎng)系列博文,您就會(huì)發(fā)現(xiàn)我是可編程實(shí)時(shí)單元和工業(yè)通信子系統(tǒng)(PRU-ICSS)(Sitara?處理器內(nèi)的可編程接口)的鐵粉。在本博文中,我想說(shuō)一下PRU-ICSS的另一個(gè)應(yīng)用,即幫助把您選擇的數(shù)字位置編碼器主接口集成入Sitara處理器內(nèi)。
首先,讓我們來(lái)看下包含位置編碼器的系統(tǒng)層面方塊圖——見(jiàn)圖1。諸如伺服驅(qū)動(dòng)器等應(yīng)用通常都配有集成了數(shù)字位置反饋編碼器的電機(jī)。位置編碼作為傳感器,能夠精準(zhǔn)測(cè)量電機(jī)軸的角度(以度為單位)或線性軸(以微米為單位)的距離。
在該等系統(tǒng)中,位置編碼器負(fù)責(zé)讀取電機(jī)軸的角度,并通過(guò)數(shù)字位置編碼器協(xié)議將信息提供給位置編碼器主控裝置。應(yīng)用處理器的磁場(chǎng)定向控制(FOC)算法負(fù)責(zé)對(duì)角度進(jìn)行進(jìn)一步處理,包括電機(jī)相電流測(cè)量,以計(jì)算脈沖寬度調(diào)制(PWM)外設(shè)的新值。
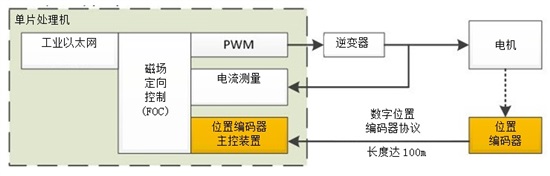
圖1:帶位置編碼器主接口的集成伺服驅(qū)動(dòng)器
位置編碼器和位置編碼器主控裝置之間的距離可長(zhǎng)達(dá)100m。數(shù)字位置編碼器協(xié)議在基于RS-485的接口上運(yùn)行,創(chuàng)建起穩(wěn)健的通信通道。
跟工業(yè)以太網(wǎng)一樣,不同的編碼器供應(yīng)商也開發(fā)了許多位置編碼器協(xié)議標(biāo)準(zhǔn),供您傳輸位置數(shù)據(jù)用。單芯片驅(qū)動(dòng)器開發(fā)人員的挑戰(zhàn)就在于根據(jù)編碼器和電機(jī)供應(yīng)商選擇和集成正確的數(shù)字編碼器協(xié)議標(biāo)準(zhǔn)。三個(gè)最常用的位置編碼器協(xié)議標(biāo)準(zhǔn)為EnDat 2.2, BiSS C和高性能接口數(shù)字舵機(jī)鏈接(HIPERFACE)DSL。
讓我們來(lái)看下這三個(gè)位置編碼器協(xié)議標(biāo)準(zhǔn)的歷史和特點(diǎn)。
- EnDat 2.2:EnDat接口是由德國(guó)公司Heindenhain開發(fā)出的產(chǎn)品,EnDat的最初版本使用的是模擬接口信號(hào)。隨著EnDat 2.2的推出,編碼器接口變?yōu)閿?shù)字雙向接口,適用于增量型和絕對(duì)型編碼器,使用RS-485差分信號(hào)傳輸標(biāo)準(zhǔn)。EnDAT使用兩種差分信號(hào)傳輸位置數(shù)據(jù):時(shí)鐘(單向)和數(shù)據(jù)(雙向)。在EnDat主控設(shè)備和編碼器裝置間建立通信需要六根線,包括編碼器供電線。
- HIPERFACE DSL:另一家德國(guó)公司西克開發(fā)出了HIPERFACE DSL,其使用RS-485差分信號(hào)傳輸標(biāo)準(zhǔn)。其運(yùn)行頻率固定為9.375MHz并支持長(zhǎng)達(dá)100m的電纜。HIPERFACE DSL的優(yōu)勢(shì)在于其能夠?qū)崿F(xiàn)HIPERFACE DSL主控制裝置和HIPERFACE DSL編碼器裝置間雙向通信的雙線接口。這兩條線還負(fù)責(zé)為編碼器供電;因此,主控制裝置接口和編碼器裝置之間只需要兩條線,能夠顯著減少布線成本。
- BiSS C:iC-Haus于2002年開發(fā)出了開放式雙向BiSS接口。BiSS接口兼容單向同步串行接口(SSI),其RS-485接口最大可支持10MHz。BiSS C標(biāo)準(zhǔn)既支持BiSS主控制裝置和編碼器裝置之間的點(diǎn)對(duì)點(diǎn)配置,也支持多個(gè)傳感器和執(zhí)行器總線連接至一臺(tái)BiSS主控制裝置。接口包括BiSS主控制裝置到編碼器裝置的共享時(shí)鐘和控制數(shù)據(jù)(MA+/MA-)信號(hào)以及編碼器裝置到主控制裝置的共享傳感器數(shù)據(jù)和控制數(shù)據(jù)(SL+/SL–)信號(hào)。BiSS主控制裝置和編碼器裝置之間總共有六根線,包括編碼器供電線。
每個(gè)數(shù)字位置編碼器協(xié)議標(biāo)準(zhǔn)傳統(tǒng)上要求在現(xiàn)場(chǎng)可編程門陣列(FPGA)、可編程邏輯裝置(PLD)或?qū)S?a target="_blank">集成電路(ASIC)方面的具體硬件實(shí)現(xiàn)。然而,在通過(guò)PRU-ICSS外設(shè)將位置編碼器主控制裝置協(xié)議集成入Sitara處理器應(yīng)用時(shí)無(wú)需外部裝置組件。AM437x處理器有兩個(gè)PRU-ICSS外設(shè)。您可以一個(gè)用于數(shù)據(jù)編碼器主控制裝置協(xié)議,如EnDAT 2.2、HIPERFACE DSL和BiSS C,另一個(gè)運(yùn)行工業(yè)以太網(wǎng)協(xié)議。
多協(xié)議位置編碼器主接口已發(fā)布,見(jiàn)PRU-ICSS中應(yīng)用AM437x的多協(xié)議數(shù)字位置編碼器主接口參考設(shè)計(jì)(TIDEP0057),其中,配備PRU-ICSS外設(shè)的ARM負(fù)責(zé)檢測(cè)所連接的位置編碼器類型。參見(jiàn)圖2。
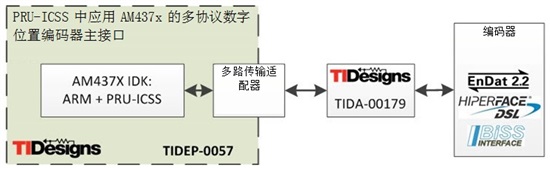
圖2:帶PRU-ICSS的多協(xié)議位置編碼器主接口
第二個(gè)參考設(shè)計(jì),用于工業(yè)通信和電機(jī)控制的單芯片驅(qū)動(dòng)器(TIDEP0025),集成單芯片驅(qū)動(dòng)器的系統(tǒng)方法,如圖1所示。在本參考設(shè)計(jì)中,位置編碼器主接口使用EnDat 2.2,一個(gè)運(yùn)行在AM437x的PRU-ICSS上,用于與位置編碼器通信,而另一個(gè)PRU-ICSS用于EtherCAT從通信支持。
PRU-ICSS作為極其靈活的外設(shè),可以集成之前在外部ASIC和FPGA中提供的復(fù)雜功能。正如本博文中提到的,Sitara處理器系列的PRU-ICSS集成了很多位置編碼器協(xié)議用的位置編碼器主接口,因此,能夠免除該等外部組件。將配備PRU-ICSS的位置編碼器主接口集成入Sitara處理器時(shí)可以節(jié)約開發(fā)板空間、組件成本并建立高性能吞吐量系統(tǒng)。
其他信息
- 訂購(gòu)AM437x工業(yè)開發(fā)套件開始使用位置編碼器協(xié)議。
- 利用絕對(duì)位置編碼器的通用數(shù)字接口參考設(shè)計(jì)(TIDA-00179)探索RS-485接口模擬解決方案。
- 了解更多其它TI處理器支持的工業(yè)通信協(xié)議。
- 閱讀AM437x處理器可用的單芯片驅(qū)動(dòng)器解決方案
- 下載其他位置編碼器相關(guān)的TI設(shè)計(jì)。
- 閱讀位置編碼器系列博文了解更多關(guān)于位置編碼器接口的設(shè)計(jì)信息
-
處理器
+關(guān)注
關(guān)注
68文章
19178瀏覽量
229200 -
編碼器
+關(guān)注
關(guān)注
45文章
3601瀏覽量
134201
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
磁編碼器工作原理解析 磁編碼器與光編碼器的比較
二進(jìn)制編碼器與絕對(duì)編碼器的區(qū)別
磁電編碼器和光電編碼器的區(qū)別
旋轉(zhuǎn)編碼器可以收集并發(fā)出什么信號(hào),旋轉(zhuǎn)編碼器信號(hào)異常怎么處理
Sitara?處理器和MCU上支持的工業(yè)通信協(xié)議

伺服編碼器分辨率是什么意思
拉線編碼器的安裝與使用方法
脈沖編碼器位置未確定如何解除,脈沖編碼器位置怎么調(diào)
編碼器原點(diǎn)設(shè)定方法 | 編碼器原點(diǎn)丟失怎樣找回
編碼器零點(diǎn)位置怎么看 | 編碼器零位怎樣確定

如何將增量旋轉(zhuǎn)編碼器與Arduino連接
編碼器脈沖信號(hào)丟失怎么處理
磁性編碼器和光電編碼器的比較
編碼器種類及編碼器原理

編碼器與PLC的接線方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論