") 機(jī)器人IMU:補(bǔ)足導(dǎo)航欠缺,輔助機(jī)器運(yùn)動(dòng)
機(jī)器人IMU:補(bǔ)足導(dǎo)航欠缺,輔助機(jī)器運(yùn)動(dòng)
從掃地機(jī)器人到物流機(jī)器人到工業(yè)搬運(yùn)機(jī)器人,這些都可以算作移動(dòng)機(jī)器人范疇。隨著移動(dòng)機(jī)器人的普及,大家也對(duì)它們的出現(xiàn)已經(jīng)習(xí)以為常了。我們常見(jiàn)的這些移動(dòng)機(jī)器人都屬于輪式機(jī)器人,雖然它們有著各種各樣的底盤,但歸根結(jié)底它們的移動(dòng)都需要靠底盤上的車輪來(lái)模擬人的移動(dòng)。
兩輪差速底盤應(yīng)該是現(xiàn)在應(yīng)用最多的移動(dòng)底盤,兩個(gè)驅(qū)動(dòng)輪帶一個(gè)從動(dòng)萬(wàn)向輪,靠差速轉(zhuǎn)彎。掃地機(jī)器人以及絕大部分物流AMR都選擇了這種移動(dòng)底盤。尤其是AMR,作為自主導(dǎo)航機(jī)器人,機(jī)器必須實(shí)時(shí)知曉自己的位置。在移動(dòng)機(jī)器人測(cè)算自己位置的時(shí)候,離不開(kāi)絕對(duì)角度這個(gè)值,這個(gè)值是由IMU提供的。可以說(shuō)機(jī)器人整體里程計(jì)的精度,也就是機(jī)器人的”位置感”,和IMU有著莫大的關(guān)系。
融合IMU成了視覺(jué)SLAM方案和激光SLAM方案補(bǔ)足自身導(dǎo)航方案缺點(diǎn)的有效手段。IMU發(fā)展至今也將加速度傳感器、陀螺儀、磁傳感器等MEMS器件集成在一起,以更小的體積、更低的成本來(lái)輔助機(jī)器運(yùn)動(dòng)。本期將挑選機(jī)器人應(yīng)用向性能頂尖的IMU看看它們做到了什么樣的層次。
ADIS16486完整慣性系統(tǒng)
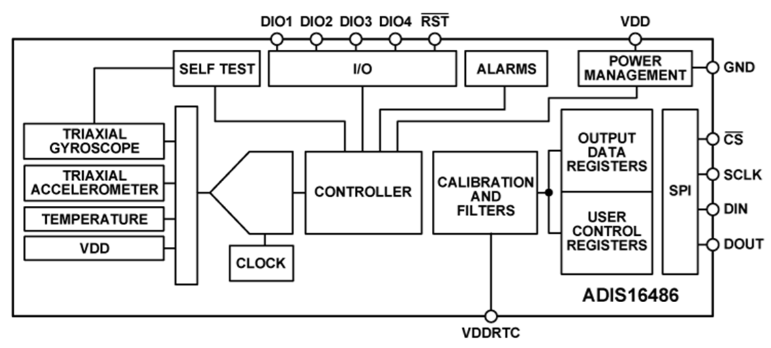
ADIS16486是ADI目前最新的機(jī)器人應(yīng)用向的慣性系統(tǒng),應(yīng)用了ADI行業(yè)領(lǐng)先的iMEMS技術(shù)和優(yōu)化動(dòng)態(tài)性能的信號(hào)調(diào)理功能。
(ADI)
ADIS16486內(nèi)置了一個(gè)三軸陀螺儀和一個(gè)三軸加速計(jì),針對(duì)各傳感器的靈敏度、偏置、對(duì)準(zhǔn)和線性加速度都進(jìn)行了校準(zhǔn)。可以說(shuō)每個(gè)傳感器都配有動(dòng)態(tài)補(bǔ)償公式,提供精確的傳感器測(cè)量。
內(nèi)置的三軸陀螺儀最重要的靈敏度誤差,僅有±0.5%,這是最關(guān)鍵的指標(biāo)。動(dòng)態(tài)范圍為±450°/s,軸間錯(cuò)位誤差為±0.018°,運(yùn)行偏置的穩(wěn)定性為5.3°/h,F(xiàn)S非線性度僅為0.01%。三軸陀螺儀的精度參數(shù)值都是很高的精度水平而且噪聲密度極低。同時(shí)三軸數(shù)字加速計(jì)的動(dòng)態(tài)范圍也在±18g左右。在保證三軸的精度同時(shí),還有著角度增量輸出和速度增量輸出。嚴(yán)格的正交對(duì)準(zhǔn)可簡(jiǎn)化導(dǎo)航系統(tǒng)中的慣性坐標(biāo)系對(duì)準(zhǔn)。
該慣性系統(tǒng)可以承受最大2000g的機(jī)械沖擊,串行外設(shè)接口和寄存器結(jié)構(gòu)針對(duì)數(shù)據(jù)收集和配置控制提供簡(jiǎn)單的接口。這種完整的系統(tǒng)設(shè)計(jì)比起復(fù)雜且昂貴的分立設(shè)計(jì),可以說(shuō)是既簡(jiǎn)單又高效。這系列可以很好的適配各類移動(dòng)機(jī)器人導(dǎo)航系統(tǒng)。
ICM-42688-P IMU單元
ICM-42688-P是TDK針對(duì)機(jī)器人運(yùn)動(dòng)追蹤應(yīng)用推出的高性能6軸IMU。 TDK慣性傳感器系列由加速度傳感器、陀螺儀傳感器復(fù)合化的IMU構(gòu)成,旗下的機(jī)器人IMU在日本機(jī)器人行業(yè)中有很高的知名度。
(TDK)
這款6軸MEMS運(yùn)動(dòng)傳感器,在性能上是絕對(duì)的行業(yè)領(lǐng)先。它的噪聲、靈敏度以及隨時(shí)間和溫度變化的偏置穩(wěn)定性都處于很高的行業(yè)水平。其中的陀螺儀,最關(guān)鍵的靈敏度誤差,依然是±0.5%這個(gè)絕對(duì)領(lǐng)先的數(shù)值。在零速率偏移量上,可以做到±0.5dps這種車載水平。而在機(jī)器人應(yīng)用中絕對(duì)重要的噪聲密度,為0.0028dps/√Hz,低密度的噪聲讓機(jī)器人更容易獲取自己的位置信息。
加速度計(jì)同樣是±0.5%的靈敏度誤差以及車載水平的±40mg零加速度偏移量。噪聲密度為75dps/√Hz。該IMU配合TDK旗下的RoboVac可以進(jìn)一步提高應(yīng)用程序性能的獨(dú)特功能,如與RTC同步的樣本,20位的ADC,32kHz的ODR。
這個(gè)系列還有一個(gè)更直接的優(yōu)勢(shì),功耗低。在低噪聲模式下的A+G為880μA;在低功率模式下的A小于50μA。對(duì)于移動(dòng)機(jī)器人這類中小型機(jī)器人,低功耗器件往往是廠商的第一選擇。
ISM330DHCX iNEMO慣性模塊
之所以叫做iNEMO慣性模塊,是因?yàn)镾T在IMU內(nèi)整合了補(bǔ)充類型的傳感器,提供了比分立式MEMS產(chǎn)品更小巧、穩(wěn)定且易于組裝的慣性模塊。整合的器件包括加速計(jì),陀螺儀以及磁力計(jì)。

(ST)
ISM330DHCX的傳感元件采用專門的MEMS工藝制造,IC接口則采用CMOS技術(shù)開(kāi)發(fā),與傳感元件有很好的匹配度。在ISM330DHCX中不同于其他設(shè)計(jì)的是加速度計(jì)和陀螺儀的傳感元件在同一個(gè)硅芯片上,這種設(shè)計(jì)最直接的效果就是提升了器件的穩(wěn)定性和魯棒性。
ISM330DHCX的滿標(biāo)度加速度范圍為±2/±4/±8/±16 g,角速率范圍為±125/±250/±500/±1000/±2000/±4000 dps覆蓋范圍很廣,不僅適用于機(jī)器人應(yīng)用,對(duì)于絕大部分工業(yè)應(yīng)用都有覆蓋。雖然該模塊是泛工業(yè)應(yīng)用器件,不是專門針對(duì)機(jī)器人應(yīng)用推出的,但是它在整體設(shè)計(jì)有無(wú)可爭(zhēng)議的優(yōu)異性能,以及完善的配套可以完美契合移動(dòng)機(jī)器人應(yīng)用。
首先為了在系統(tǒng)層面進(jìn)一步節(jié)電,iNEMO 慣性模塊內(nèi)嵌機(jī)器學(xué)習(xí)內(nèi)核。MLC運(yùn)行一個(gè)傳感器內(nèi)置的分類引擎,卸載主處理器的負(fù)荷以運(yùn)行不同的任務(wù),同時(shí)內(nèi)置的傳感器可以識(shí)別運(yùn)動(dòng)數(shù)據(jù)。另外多個(gè)傳感器輸出的集成令運(yùn)動(dòng)傳感系統(tǒng)的精度很高,在機(jī)器室內(nèi)導(dǎo)航應(yīng)用上能很好的彌補(bǔ)V-SLAM和激光SLAM的缺陷。
小結(jié)
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
移動(dòng)機(jī)器人
+關(guān)注
關(guān)注
2文章
757瀏覽量
33544 -
IMU
+關(guān)注
關(guān)注
6文章
298瀏覽量
45678
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
柔性機(jī)器人與剛性機(jī)器人區(qū)別與聯(lián)系
、伸縮和變形。其結(jié)構(gòu)通常模仿生物體的柔性和彈性特征。 剛性機(jī)器人:由剛性材料(如金屬、硬質(zhì)塑料等)制成,具有固定形狀和結(jié)構(gòu),無(wú)法輕易變形。 2.運(yùn)動(dòng)方式 柔性機(jī)器人:通過(guò)柔性驅(qū)動(dòng)(如氣動(dòng)、液壓、形狀記憶合金等)實(shí)現(xiàn)復(fù)雜的

導(dǎo)遠(yuǎn)IMU賦能機(jī)器人落地
在人工智能和大模型的推動(dòng)下,機(jī)器人技術(shù)正以前所未有的速度演進(jìn),將科幻電影中的美好幻想逐步變?yōu)楝F(xiàn)實(shí)。而這一切,都離不開(kāi)一項(xiàng)關(guān)鍵傳感器——慣性測(cè)量單元(IMU)。
Al大模型機(jī)器人
金航標(biāo)kinghelm薩科微slkor總經(jīng)理宋仕強(qiáng)介紹說(shuō),薩科微Al大模型機(jī)器人有哪些的優(yōu)勢(shì)?薩科微AI大模型機(jī)器人由清華大學(xué)畢業(yè)的天才少年N博士和王博士團(tuán)隊(duì)開(kāi)發(fā),與同行相比具有許多優(yōu)勢(shì):語(yǔ)言
發(fā)表于 07-05 08:52
自動(dòng)停車機(jī)器人,如何快速構(gòu)建?
現(xiàn)場(chǎng)作業(yè) ▲停車移動(dòng)機(jī)器人構(gòu)成 科聰停車機(jī)器人 解決方案 -KC SOLUTION 本方案中核心部分采用的是科聰通用移動(dòng)機(jī)器人控制器,導(dǎo)航方式一般選擇激光

abb工業(yè)機(jī)器人的運(yùn)動(dòng)模式有哪些
ABB工業(yè)機(jī)器人的運(yùn)動(dòng)模式是其在自動(dòng)化生產(chǎn)線上執(zhí)行任務(wù)的關(guān)鍵因素之一。本文將詳細(xì)介紹ABB工業(yè)機(jī)器人的多種運(yùn)動(dòng)模式,以及它們?cè)趯?shí)際應(yīng)用中的優(yōu)勢(shì)和局限性。 一、基本
ABB工業(yè)機(jī)器人運(yùn)動(dòng)指令有哪幾個(gè)
ABB工業(yè)機(jī)器人是一種廣泛應(yīng)用于制造業(yè)、物流、醫(yī)療等領(lǐng)域的自動(dòng)化設(shè)備。其運(yùn)動(dòng)指令是實(shí)現(xiàn)機(jī)器人精確控制的關(guān)鍵。以下是對(duì)ABB工業(yè)機(jī)器人運(yùn)動(dòng)指令
機(jī)器人在空間中運(yùn)動(dòng)指令主要有哪些
的控制下工作。機(jī)器人可以應(yīng)用于各種領(lǐng)域,如制造業(yè)、醫(yī)療、家庭服務(wù)等。 機(jī)器人運(yùn)動(dòng)的重要性 機(jī)器人運(yùn)動(dòng)是機(jī)
運(yùn)動(dòng)控制和機(jī)器人系統(tǒng)有什么區(qū)別
在自動(dòng)化和機(jī)器人技術(shù)日益發(fā)展的今天,運(yùn)動(dòng)控制和機(jī)器人系統(tǒng)是兩個(gè)經(jīng)常被提及的概念。雖然它們都在自動(dòng)化領(lǐng)域扮演著重要角色,但運(yùn)動(dòng)控制和機(jī)器人系統(tǒng)
基于FPGA EtherCAT的六自由度機(jī)器人視覺(jué)伺服控制設(shè)計(jì)
研發(fā)的六自由度串聯(lián)機(jī)器人進(jìn)行實(shí)際的運(yùn)動(dòng)控制實(shí)驗(yàn)。實(shí)驗(yàn)證明,機(jī)器人可以實(shí)時(shí)地跟隨屏幕上顯示的物塊運(yùn)動(dòng)。
主要?jiǎng)?chuàng)新點(diǎn)
本設(shè)計(jì)難點(diǎn)在于如何提高視覺(jué)檢測(cè)的實(shí)時(shí)性和
發(fā)表于 05-29 16:17
其利天下技術(shù)·搭載無(wú)刷電機(jī)的掃地機(jī)器人的前景如何?
已經(jīng)取得了顯著的進(jìn)步,但在技術(shù)層面仍存在一些壁壘需要突破。首先,機(jī)器人的導(dǎo)航和定位技術(shù)仍有提升空間,特別是在復(fù)雜家居環(huán)境中的精準(zhǔn)導(dǎo)航和避障能力還需加強(qiáng)。其次,掃地機(jī)器人的電池續(xù)航能力也
發(fā)表于 05-05 15:03
機(jī)器人運(yùn)動(dòng)學(xué)中的非完整約束與運(yùn)動(dòng)模型推導(dǎo)
機(jī)器人運(yùn)動(dòng)學(xué)中的運(yùn)動(dòng)學(xué)約束是指機(jī)器人在運(yùn)動(dòng)過(guò)程中受到的限制,包括位置、姿態(tài)、速度和加速度等因素。這些約束會(huì)對(duì)機(jī)器人的自由度產(chǎn)生影響,從而影響

EPSON愛(ài)普生助力智能泳池清潔機(jī)器人導(dǎo)航方案應(yīng)用
智能泳池清潔機(jī)器人導(dǎo)航方案目前泳池清潔機(jī)器人成為一個(gè)新的熱點(diǎn)賽道,許多公司都在此新領(lǐng)域投入研發(fā),其中主要為曾經(jīng)從事家用掃地機(jī)的相關(guān)公司,因?yàn)橛境厍鍧?b class='flag-5'>機(jī)器人的智能化與曾經(jīng)的掃地

LabVIEW的六軸工業(yè)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)
LabVIEW開(kāi)發(fā)六軸工業(yè)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)
本項(xiàng)目開(kāi)發(fā)了一個(gè)高效的工業(yè)機(jī)器人控制系統(tǒng),重點(diǎn)關(guān)注于運(yùn)動(dòng)學(xué)算法和軌跡規(guī)劃算法的實(shí)現(xiàn)和測(cè)試。LabVIEW作為一個(gè)關(guān)鍵技術(shù),在項(xiàng)目中扮演了核
發(fā)表于 12-21 20:03
高動(dòng)態(tài)人形機(jī)器人“夸父”通過(guò)OpenHarmony 3.2 Release版本兼容性測(cè)評(píng)
近日, 搭載KaihongOS的“夸父”人形機(jī)器人通過(guò)OpenAtom OpenHarmony(以下簡(jiǎn)稱“OpenHarmony”)3.2 Release版本兼容性測(cè)評(píng)并獲頒兼容性證書 。這體現(xiàn)了
發(fā)表于 12-20 09:31





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論