 【RTT大賽作品連載】 PWM操作蜂鳴器
【RTT大賽作品連載】 PWM操作蜂鳴器
蜂鳴器是一個比較常見的電子器件,主要作用是喲關于報警,提醒。
蜂鳴器有兩中類型,一種是無源蜂鳴器,沒有驅動源,需要使用PWM控制蜂鳴器響,可以通過修改PWM的占空比或者頻率來達到調整蜂鳴器聲音音調的目的;還有一種是有源蜂鳴器,有驅動源,上電接高電平就會響。
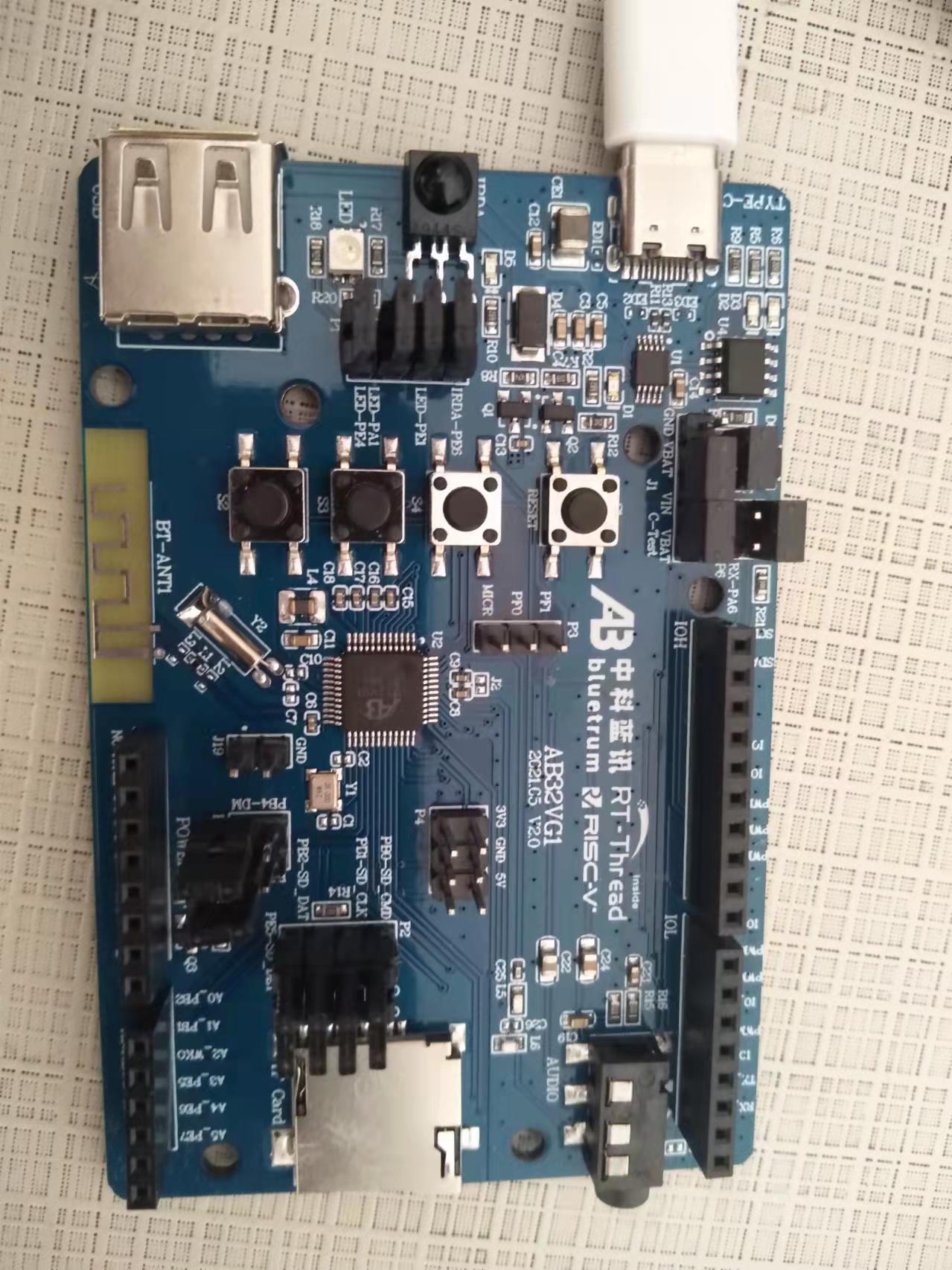
本文就將以AB32VG1作為主控,RT-thread作為操作系統來操作無源蜂鳴器。
一、創建工程
使用RT-Thread Studio來創建工程。
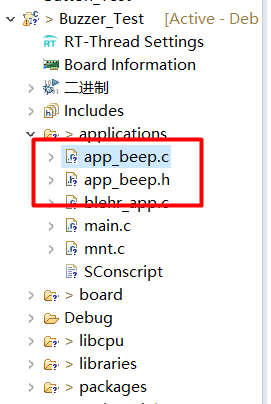
1. 新增加兩個文件app_beep.c和app_beep.h
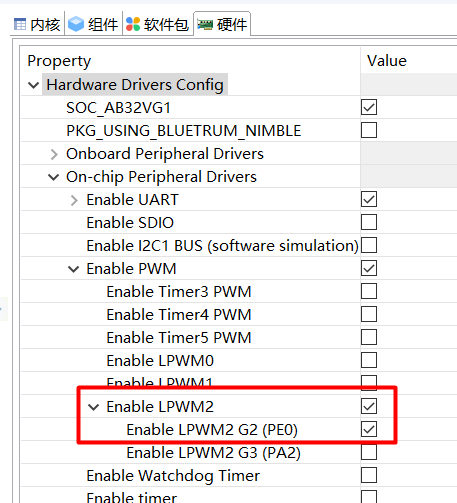
2. 打開RT-Thread Settings,使能PWM2
二、電路連接
蜂鳴器驅動引腳連接:PE0 → Beep驅動引腳
三、無源蜂鳴器操作原理
無源蜂鳴器需要自己提供驅動源,也就是PWM信號,通過控制PWM驅動頻率可以控制蜂鳴器輸出音符。
本程序通過period來控制PWM頻率,頻率為1MHz/period KHz
人耳能夠聽到的聲音頻率為20Hz~20KHz,所以操作20KHz頻率是聽不見的。
驅動程序控制PWM循環輸出1KHz~20KHz,當聲音越接近20KHz,我們能聽到的聲音越小,占空比為50%,相對而言聲音最大。占空比大小可以自己調節輸出聲音的大小。
四、操作代碼
1. 創建Beep線程
static int Pwm_Thread_Init(void)
{
rt_thread_t beep_thread;
beep_thread = rt_thread_create("Beep_thread",
PWM_Thread_Entry,
RT_NULL,
512,
10,
10);
rt_thread_startup(beep_thread);
return 0;
}
2. 初始化PWM,初始化函數在main中while循環之前調用
#define PWM_DEV_NAME "lpwm2" /* PWM 設備名稱 */
#define PWM_DEV_CHANNEL 1 /* PWM 通道 */
#define PWM_PERIOD (1000000u) // 1000000u
struct rt_device_pwm *pwm_dev; /* PWM 設備句柄 */
rt_uint32_t period, pulse;
void Pwm_Init(void)
{
period = PWM_PERIOD; /* 周期 = 1M/period kHz */
pulse = 0; /* PWM 脈沖寬度值(0 - period) */
pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);
RT_ASSERT(pwm_dev != RT_NULL);
/* 設置 PWM 周期和脈沖寬度 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, 0);
/* 使能設備 */
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
Pwm_Thread_Init();
}
3. PWM Beep驅動函數
static void PWM_Thread_Entry(void *para)
{
uint8_t i = 1;
while(1)
{
period = (uint32_t)(1000000/i);
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, period-1);
i++;
if(i > 20)
i = 1;
rt_thread_mdelay(1000);
}
}
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
PWM
+關注
關注
114文章
5143瀏覽量
213399 -
蜂鳴器
+關注
關注
12文章
889瀏覽量
45869 -
線程
+關注
關注
0文章
504瀏覽量
19651 -
RT-Thread
+關注
關注
31文章
1272瀏覽量
39920
發布評論請先 登錄
相關推薦
【RTT大賽作品連載】AB32VG1評估板到貨控制彩燈測試
【RTT大賽作品連載】AB32VG1評估板到貨控制彩燈測試篇;接下來看看在如何AB32VG1評估板控制彩燈!
在RT-ThreadStudio新建項目到對應開發配置及下載及驗證測試!
【RTT大賽作品連載】CH32V103開發板資料及上電首測
簡介 ? 參加論壇舉辦的rtt大賽也有幾天了,我選用的是CH32V103的板子,第一步就是收集板卡的相關資料了。 CH32V103是 沁恒微電子設計的一款RSIC-V的單片機,使用了RSIC-V3A

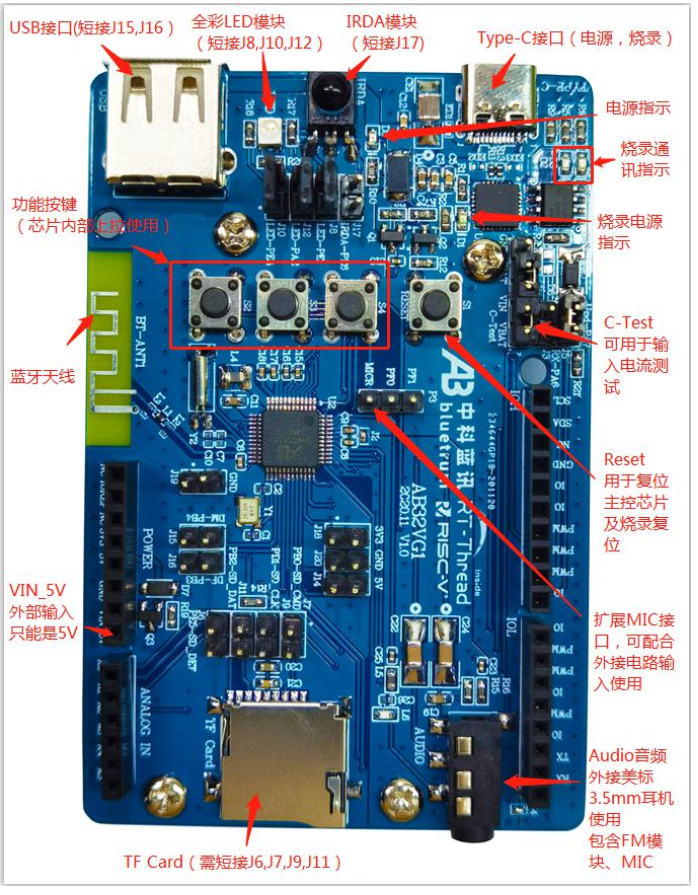
【RTT大賽作品連載】中科藍訊AB32VG1開發板開箱篇
介紹電路原理圖分析接口說明,AB32VG1開發板是以中科藍訊(Bluetrum)公司推出的基于RISC-V架構的高配置芯片AB5301A為核心所組成的。【RTT大賽作品連載】中科藍訊A

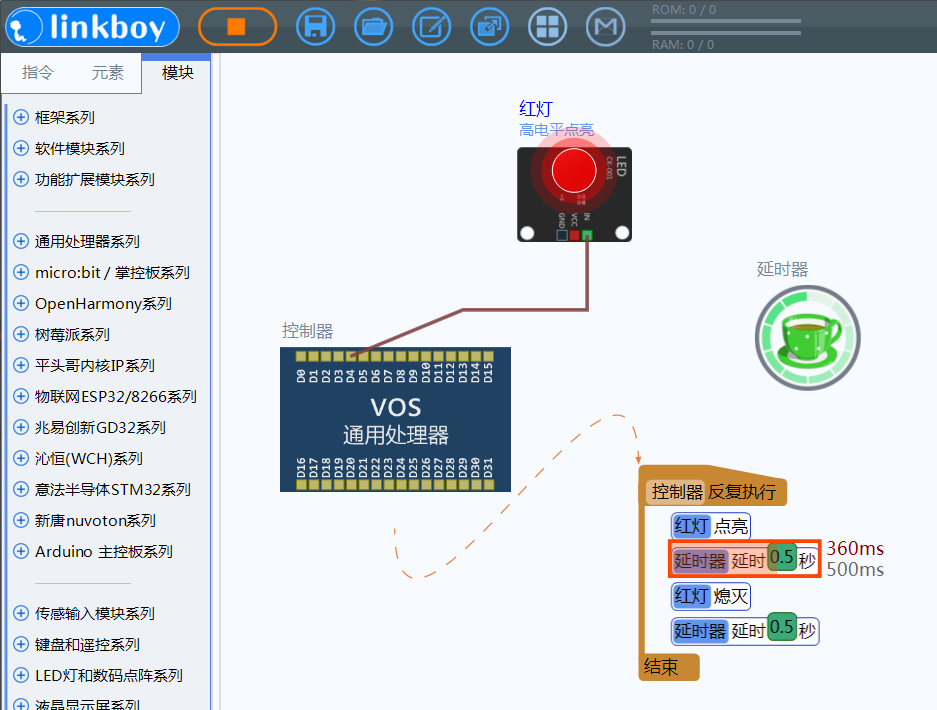
【RTT大賽作品連載】linkboy面向WCH移植(1)
本文主要講解如何讓linkboy支持WCH32開發板進行圖形化編程,主要是基于RT-Thread操作系統進行vos移植。
【星核計劃】上傳FPGA大賽作品,領取電子發燒友專屬上傳福利!
-FPGA大賽,本次大賽獎勵豐厚,不僅有獎金,還有電子發燒友論壇為參賽者準備的上傳福利,按照下面規則上傳參賽作品即可獲得,還在等什么,快來參加吧!!作品上傳地址:【FPGA開發者項目
發表于 05-21 15:01
【文章連載】RT-Thread創新應用大賽文章匯總
本作品集將會持續更新,歡迎大家訂閱關注~ 凡是在本貼參與回復者將獲得10積分(在不連續樓層評論均可獲得)專欄作者:RT-thread【RTT大賽作品
發表于 10-11 15:13
【有獎活動】RT-Thread創新應用大賽作品連載征文
禮品:https://jifen.elecfans.com/index.html?文章標題格式:【RTT大賽作品連載】+自擬內容?文章作品要
發表于 10-21 18:49
【參與有獎】激揚代碼,千元現金!RT-Thread主題征文大賽
、通俗易懂-作品言之有物、內容有一定實用性2)作品的數量—30分-發布優質原創作品數量越多,得分越高-專題類、連載類、合集類作品享受加分2.
發表于 05-27 17:51






 工商網監
工商網監
評論