 運動控制器之ZMC420SCAN的硬件接口
運動控制器之ZMC420SCAN的硬件接口
今天,正運動技術給大家分享一下運動控制器之ZMC420SCAN的硬件接口。
一、ZMC420SCAN硬件介紹
1.功能介紹
ZMC420SCAN總線控制器支持ECAT/RTEX總線連接,支持最多達20軸運動控制,支持直線插補、任意圓弧插補、空間圓弧、螺旋插補、電子凸輪、電子齒輪、同步跟隨、虛擬軸設置等;采用優化的網絡通訊協議可以實現實時的運動控制。ZMC420SCAN總線控制器支持脈沖軸/總線軸/振鏡軸混合插補。
ZMC420SCAN系列運動控制器支持以太網,RS232通訊接口和電腦相連,接收電腦的指令運行,可以通過CAN總線去連接各個擴展模塊,從而擴展輸入輸出點數或運動軸。
ZMC420SCAN系列運動控制卡的應用程序可以使用VC,VB,VS,C++,C#等軟件來開發,程序運行時需要動態庫zmotion.dll。調試時可以把ZDevelop軟件同時連接到控制器,從而方便調試、方便觀察。
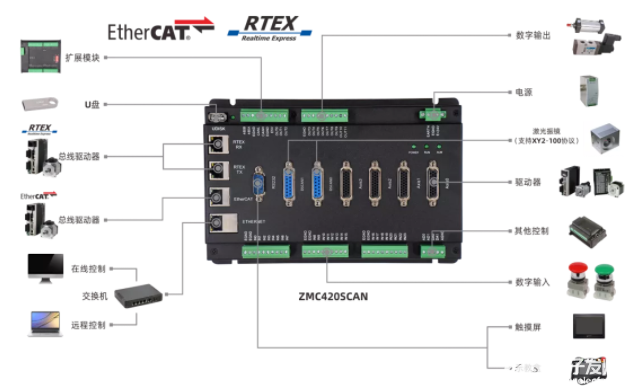
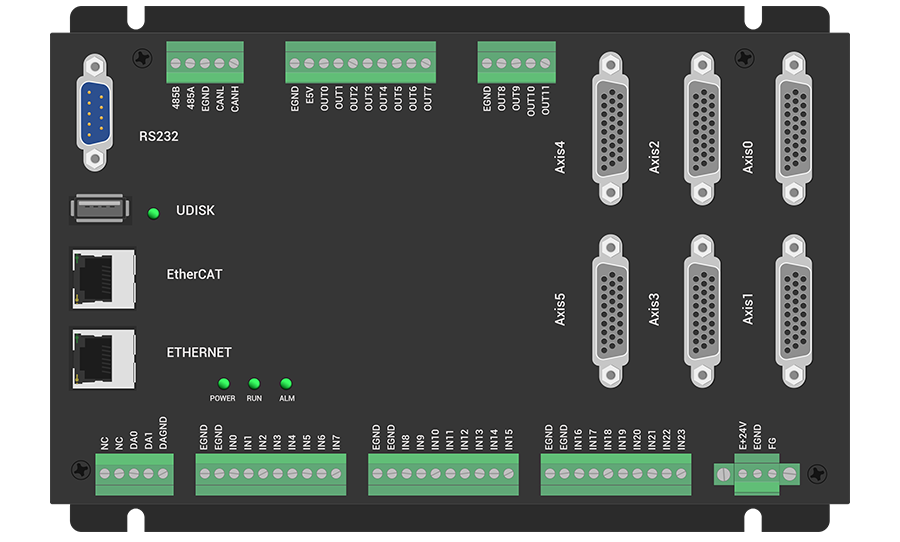
2.硬件接口
3.振鏡控制過程
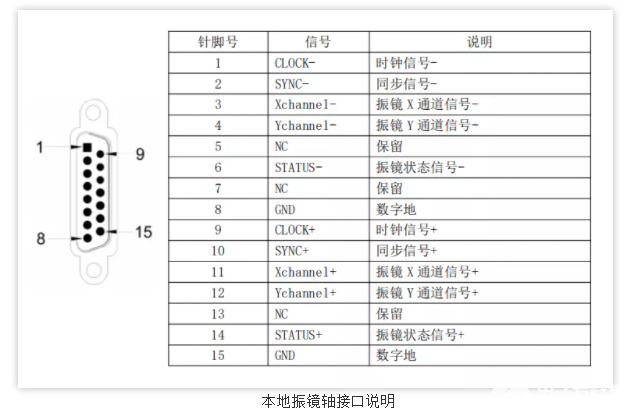
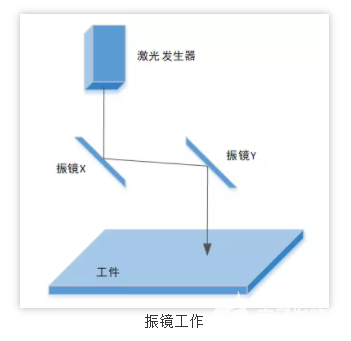
激光振鏡是一種專門用于激光加工領域的特殊的運動器件,激光振鏡頭內包含的主要元件是激光發生器,兩個電機和兩個振鏡片,它靠兩個電機分別控制兩個振鏡片X和Y反射激光,形成XY平面的運動,這兩個電機使用控制器上的振鏡軸接口控制。
激光振鏡不同于一般的電機,激光振鏡具有非常小的慣量,且在運動的過程中負載非常小,只需要帶動反射鏡片,系統的響應非常快。
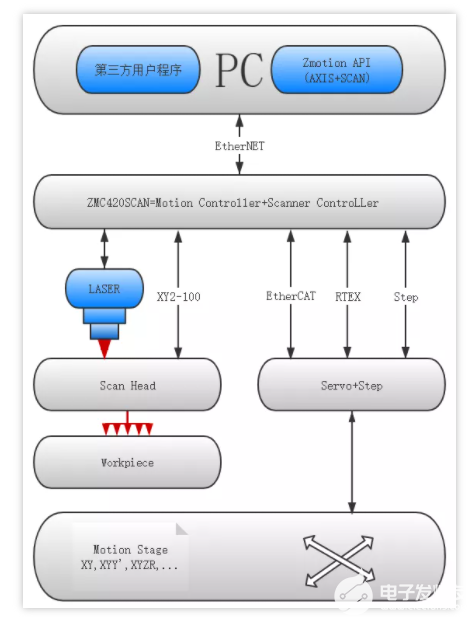
ZMC420SCAN支持XY2-100振鏡協議,支持運動控制與振鏡聯合插補運動。上位機通過網口與控制器相連,通過XY2-100振鏡協議進行控制振鏡軸的運動,通過總線協議或者脈沖模式控制伺服軸運動。
使用ZMC420SCAN控制器的振鏡軸接口連接激光振鏡頭,每個振鏡軸接口內包含兩路振鏡通道信號,分別控制振鏡片X、Y的偏轉,從而控制了激光打到工件的位置。
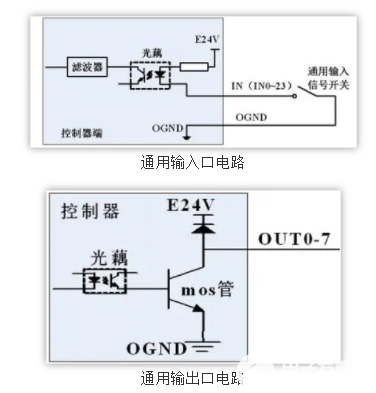
4.控制器PWM模擬量介紹
ZMC420SCAN的外部通用輸出口0-11都具有PWM輸出功能,PWM輸出受正常輸出功能的控制,只有輸出口狀態ON的時候PWM才能實際輸出,這樣可以用來控制激光能量。

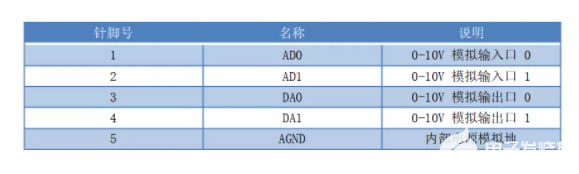
ZMC420SCAN控制器存在兩路模擬量輸入輸出,可進行控制激光器能量輸出,模擬量精度為12位。
5.控制器基本信息
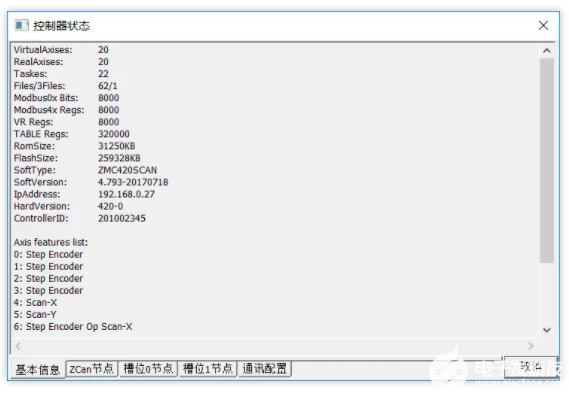
軸0-3為普通脈沖軸,振鏡0為軸4、軸5控制振鏡XY,振鏡1為軸6、軸7控制XY。
二、C++進行振鏡+運動控制開發
1.新建MFC項目并添加函數庫
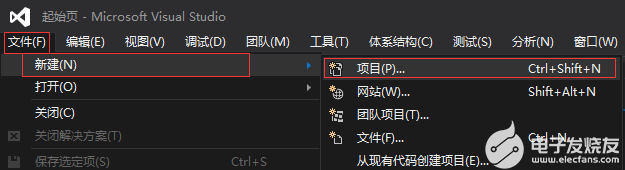
(1)在VS2015菜單“文件”→“新建”→“項目”,啟動創建項目向導。
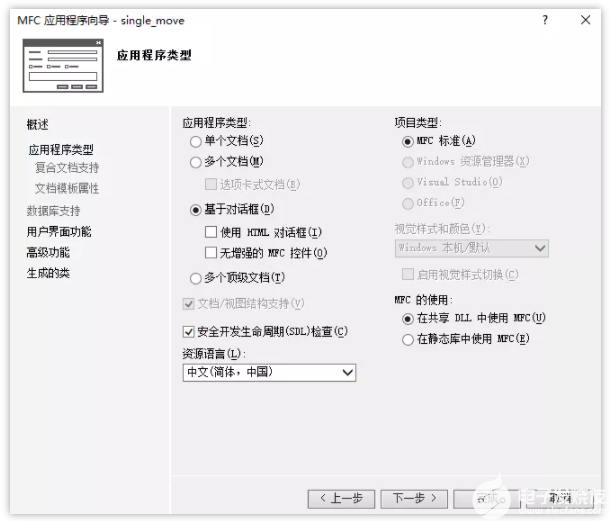
(2)選擇開發語言為“VisualC++”和程序類型“MFC應用程序”。

(3)點擊下一步即可。
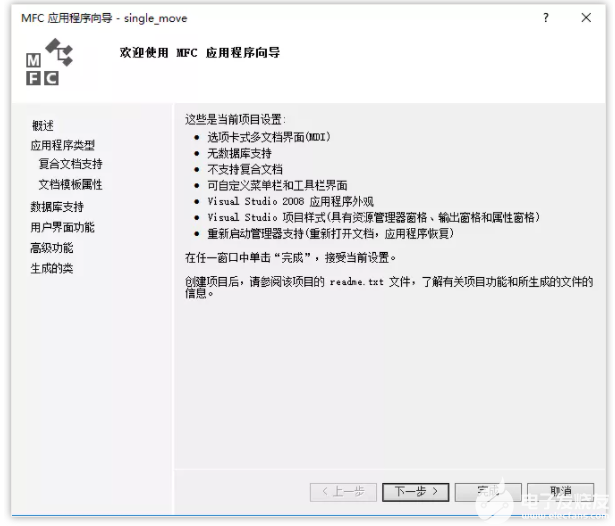
(4)選擇類型為“基于對話框”,下一步或者完成。
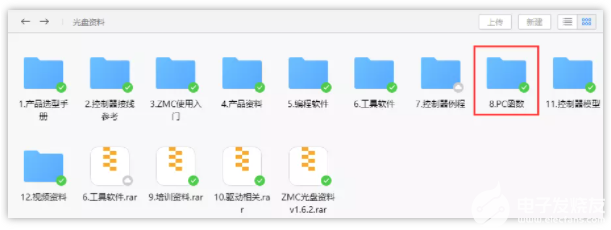
(5)找到廠家提供的光盤資料,路徑如下(64位庫為例)。
A.進入廠商提供的光盤資料找到“8.PC函數”文件夾,并點擊進入。
B.選擇“函數庫2.1”文件夾。
C.選擇“Windows平臺”文件夾。
D.根據需要選擇對應的函數庫這里選擇64位庫。
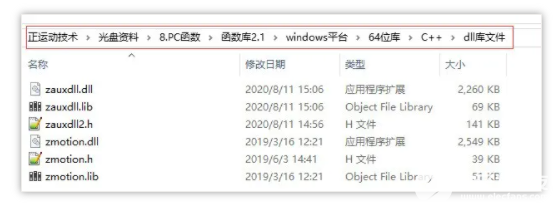
E.解壓C++的壓縮包,里面有C++對應的函數庫。
F.函數庫具體路徑如下。
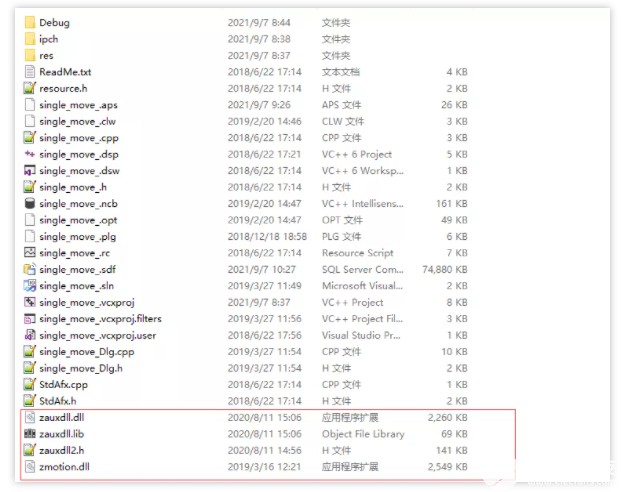
(6)將廠商提供的C++的庫文件和相關頭文件復制到新建的項目里面。
(7)在項目中添加靜態庫和相關頭文件。
A.先右擊項目文件,接著依次選擇:“添加”→“現有項”。
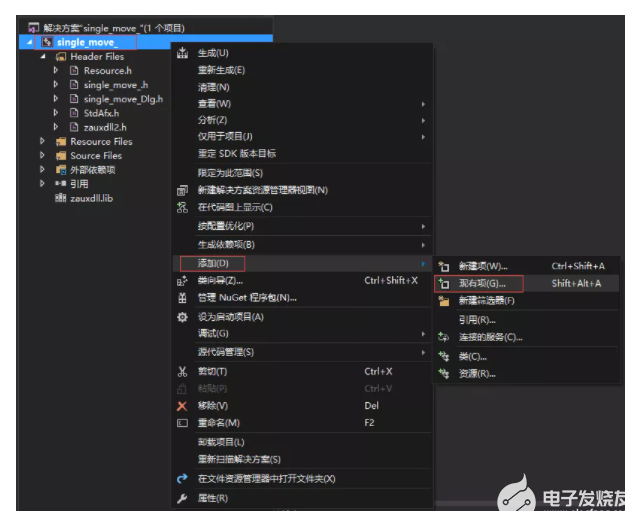
B.在彈出的窗口中依次添加靜態庫和相關頭文件。
(8)聲明用到的頭文件和定義控制器連接句柄。
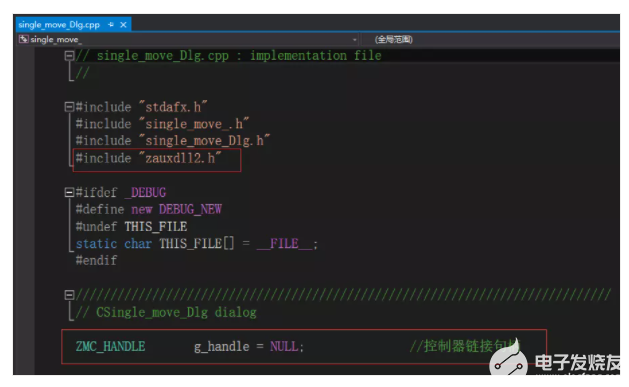
至此項目新建完成,可進行MFC項目開發。
2.查看PC函數手冊,熟悉相關函數接口
(1)PC函數手冊也在光盤資料里面,具體路徑如下:“光盤資料\8.PC函數\函數庫2.1\ZMotion函數庫編程手冊V2.1.pdf”
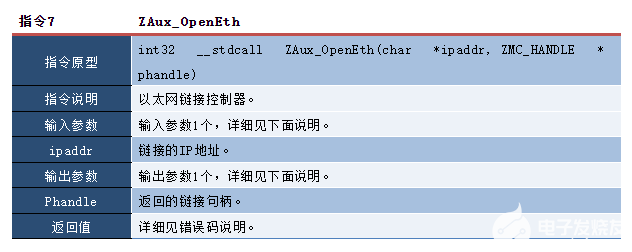
(2)鏈接控制器,獲取鏈接句柄。
ZAux_OpenEth()接口說明:
(3)振鏡運動接口。
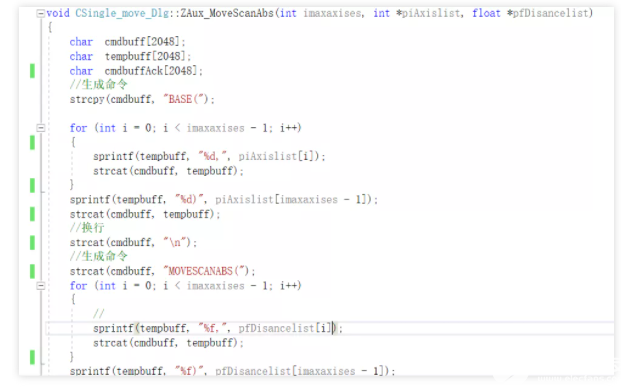
為振鏡運動單獨封裝了一個運動接口,使用MOVESCANABS指令進行運動,采用FORCE_SPEED參數設置運動過程中的速度,運動過程中基本不存在加減速過程,支持us級別的時間控制。
3.MFC開發控制器振鏡運動例程
(1)例程界面如下。
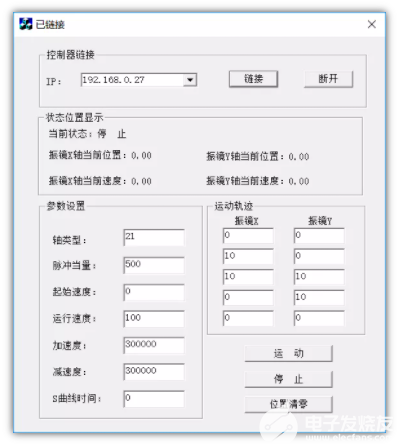
(2)鏈接按鈕的事件處理函數中調用鏈接控制器的接口函數ZAux_OpenEth(),與控制器進行鏈接,鏈接成功后啟動定時器1監控控制器狀態。
//網口鏈接控制器
void CSingle_move_Dlg::OnOpen()
{
char buffer[256];
int32 iresult;
//如果已經鏈接,則先斷開鏈接
if(NULL != g_handle)
{
ZAux_Close(g_handle);
g_handle = NULL;
}
//從IP下拉框中選擇獲取IP地址
GetDlgItemText(IDC_IPLIST,buffer,255);
buffer[255] = '\0';
//開始鏈接控制器
iresult = ZAux_OpenEth(buffer, &g_handle);
if(ERR_SUCCESS != iresult)
{
g_handle = NULL;
MessageBox(_T("鏈接失敗"));
SetWindowText("未鏈接");
return;
}
//鏈接成功開啟定時器1
SetWindowText("已鏈接");
SetTimer( 1, 100, NULL );
}
(3)通過定時器監控控制器狀態。
void CSingle_move_Dlg::OnTimer(UINT_PTR nIDEvent)
{
// TODO: Add your message handler code here and/or call default
if(NULL == g_handle)
{
MessageBox(_T("鏈接斷開"));
return ;
}
if(1 == nIDEvent)
{
CString string;
float position = 0;
ZAux_Direct_GetDpos( g_handle,m_nAxis,&position); //獲取當前軸位置
string.Format("振鏡X軸當前位置:%.2f", position );
GetDlgItem( IDC_CURPOS )->SetWindowText( string );
float NowSp = 0;
ZAux_Direct_GetVpSpeed( g_handle,m_nAxis,&NowSp); //獲取當前軸速度
string.Format("振鏡X軸當前速度:%.2f", NowSp );
GetDlgItem( IDC_CURSPEED)->SetWindowText( string );
ZAux_Direct_GetDpos(g_handle, m_nAxis+1, &position); //獲取當前軸位置
string.Format("振鏡Y軸當前位置:%.2f", position);
GetDlgItem(IDC_CURPOS2)->SetWindowText(string);
ZAux_Direct_GetVpSpeed(g_handle, m_nAxis+1, &NowSp); //獲取當前軸速度
string.Format("振鏡Y軸當前速度:%.2f", NowSp);
GetDlgItem(IDC_CURSPEED2)->SetWindowText(string);
int status = 0;
ZAux_Direct_GetIfIdle(g_handle, m_nAxis,&status); //判斷當前軸狀態
if (status == -1)
{
GetDlgItem( IDC_CURSTATE )->SetWindowText( "當前狀態:停 止" );
}
else
{
GetDlgItem( IDC_CURSTATE )->SetWindowText( "當前狀態:運動中" );
}
}
CDialog::OnTimer(nIDEvent);
}
(4)通過啟動按鈕的事件處理函數獲取編輯框的移動軌跡,并設置振鏡軸參數操作振鏡軸運動。
void CSingle_move_Dlg::OnStart() //啟動運動
{
if(NULL == g_handle)
{
MessageBox(_T("鏈接斷開狀態"));
return ;
}
UpdateData(true);//刷新參數
int status = 0;
ZAux_Direct_GetIfIdle(g_handle, m_nAxis,&status); //判斷當前軸狀態
if (status == 0) //已經在運動中
{
return ;
}
//設定軸類型 21振鏡軸類型
for (int i = 4; i < 6; i++)
{
//m_Atype=21振鏡軸類型
ZAux_Direct_SetAtype(g_handle, i, m_Atype);
ZAux_Direct_SetMerge(g_handle,i,1);
//設置脈沖當量
ZAux_Direct_SetUnits(g_handle, i, m_units);
//設定速度,加減速
ZAux_Direct_SetLspeed(g_handle, i, m_lspeed);
ZAux_Direct_SetSpeed(g_handle, i, m_speed);
ZAux_Direct_SetForceSpeed(g_handle, i, m_speed);
ZAux_Direct_SetAccel(g_handle, i, m_acc);
ZAux_Direct_SetDecel(g_handle, i, m_dec);
//設定S曲線時間 設置為0表示梯形加減速
ZAux_Direct_SetSramp(g_handle, i, m_sramp);
}
//使用MOVESCANABS運動
int axislist[2] = { 4,5 };
CString str;
GetDlgItem(IDC_EDIT_POSX1)->GetWindowText(str);
float dbx = atof(str);
GetDlgItem(IDC_EDIT_POSY1)->GetWindowText(str);
float dby = atof(str);
float dposlist[2] = { dbx ,dby};
ZAux_MoveScanAbs(2, axislist, dposlist);
GetDlgItem(IDC_EDIT_POSX2)->GetWindowText(str);
dbx = atof(str);
GetDlgItem(IDC_EDIT_POSY2)->GetWindowText(str);
dby = atof(str);
dposlist[0] = dbx;
dposlist[1] = dby;
ZAux_MoveScanAbs(2, axislist, dposlist);
GetDlgItem(IDC_EDIT_POSX3)->GetWindowText(str);
dbx = atof(str);
GetDlgItem(IDC_EDIT_POSY3)->GetWindowText(str);
dby = atof(str);
dposlist[0] = dbx;
dposlist[1] = dby;
ZAux_MoveScanAbs(2, axislist, dposlist);
GetDlgItem(IDC_EDIT_POSX4)->GetWindowText(str);
dbx = atof(str);
GetDlgItem(IDC_EDIT_POSY4)->GetWindowText(str);
dby = atof(str);
dposlist[0] = dbx;
dposlist[1] = dby;
ZAux_MoveScanAbs(2, axislist, dposlist);
GetDlgItem(IDC_EDIT_POSX5)->GetWindowText(str);
dbx = atof(str);
GetDlgItem(IDC_EDIT_POSY5)->GetWindowText(str);
dby = atof(str);
dposlist[0] = dbx;
dposlist[1] = dby;
ZAux_MoveScanAbs(2, axislist, dposlist);
UpdateData(false);
}
(5)通過斷開按鈕的事件處理函數來斷開與控制卡的連接。
void CSingle_move_Dlg::OnClose() //斷開鏈接
{
// TODO: Add your control notification handler code here
if(NULL != g_handle)
{
KillTimer(1); //關定時器
KillTimer(2);
ZAux_Close(g_handle);
g_handle = NULL;
SetWindowText("未鏈接");
}
}
(6)通過坐標清零按鈕的事件處理函數移動振鏡軸回零到中心零點位置,不直接使用dpos=0,修改振鏡軸坐標。
void CSingle_move_Dlg::OnZero() //清零坐標
{
if(NULL == g_handle)
{
MessageBox(_T("鏈接斷開狀態"));
return ;
}
// TODO: Add your control notification handler code here
int axislist[2] = { 4,5 };
float dposlist[2] = { 0 };
ZAux_Direct_MoveAbs(g_handle,2,axislist,dposlist); //設置運動回零點
}
三、調試與監控
編譯運行例程,同時通過ZDevelop軟件連接控制器對控制器狀態進行監控。
1.ZDevelop軟件連接控制器監控控制器的狀態,查看振鏡軸對應參數,并可搭配示波器檢測振鏡軌跡。
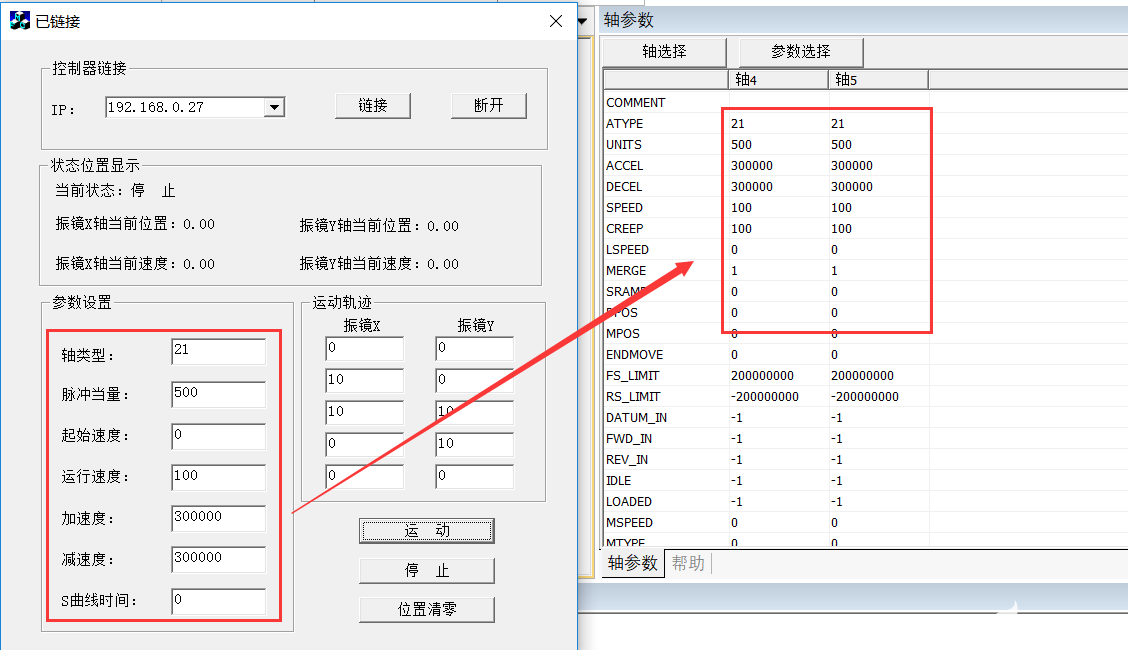
設置振鏡軸運動,首先需要將軸類型配置成21振鏡軸類型,并對應配置振鏡軸的速度加減速等參數才可操作振鏡進行運動。
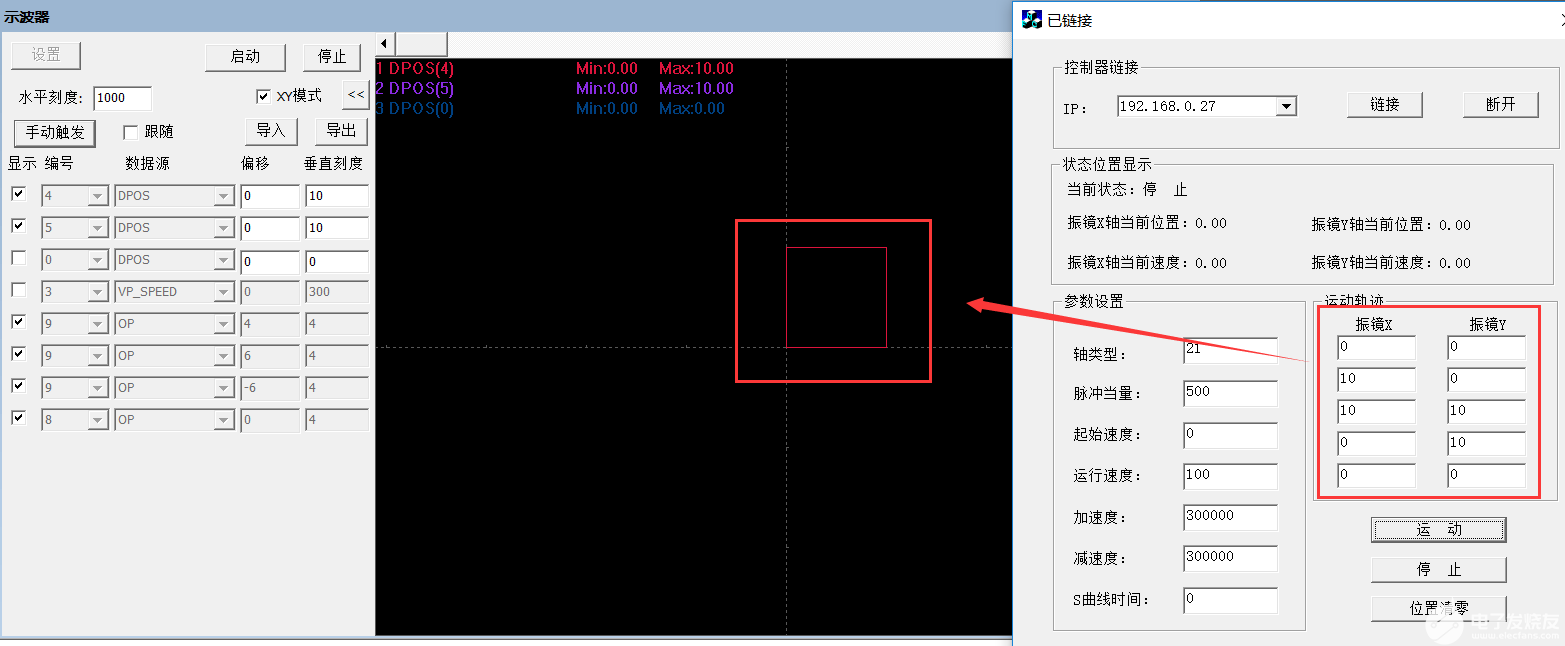
2.通過ZDevelop軟件的示波器監控振鏡運動運行軌跡。
本次,正運動技術開放式激光振鏡+運動控制器(一):硬件接口,就分享到這里。
審核編輯:湯梓紅
-
控制器
+關注
關注
112文章
16203瀏覽量
177414 -
接口
+關注
關注
33文章
8497瀏覽量
150835 -
硬件
+關注
關注
11文章
3252瀏覽量
66115
發布評論請先 登錄
相關推薦
脈沖全閉環EtherCAT運動控制器的固件升級






ZMC900E控制器之ROS2環境安裝指南

多軸高性能EtherCAT總線運動控制器ZMC408CE硬件介紹


EtherCAT運動控制器在LabVIEW中的運動控制與實時數據采集

EtherCAT運動控制器在ROS上的應用開發案例(上)

ZMC900E 國產EtherCAT主站控制器 — 電源口傳導騷擾整改






 工商網監
工商網監
評論