 詳解Board和SoC解耦的設計思路
詳解Board和SoC解耦的設計思路
摘要
本文簡單介紹OpenHarmony輕量系統移植,Board和SoC解耦的設計思路。適合自己動手移植OpenHarmony輕量系統的朋友們。開始嘗試講解一下系統的移植,主要是輕量系統,也可能會順便講下L1移植。
對應的是 01_vendor_soc_board

1、hb編譯原理
當我們輸入hb set命令后,會提示我們選擇要編譯構建的工程。
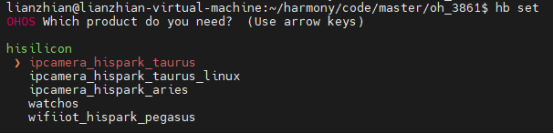
那么,hb 怎么知道有哪些工程可以編譯呢?
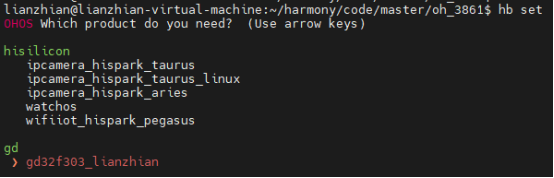
事實上這些工程都是在vendor文件夾中的,為了驗證,我們可以在vendor中創建一個空的文件夾:gd,然后gd文件夾下面又創建了gd32f303_lianzhian文件夾。
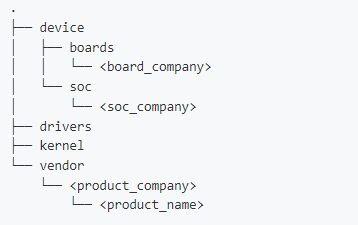
但是這里還不夠,一個標準簡單的vendor文件夾結構如下:
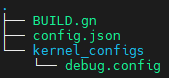
其中debug.config內容為空即可,因為它的內容是自動生成的,后面我們配置的內核的時候需要用到。
這幾個文件我們可以直接復制3861的過來,然后刪去我們不需要的子系統,我們只需要保留如下即可:
config.json文件:
{"product_name": "gd32f303_lianzhian","type": "mini","version": "3.0","device_company": "lianzhian","board": "gd32f303_lianzhian","kernel_type": "liteos_m","kernel_version": "","subsystems": [{"subsystem": "kernel","components": [{ "component": "liteos_m","features":[]}]}],"third_party_dir": "","product_adapter_dir": ""}
向右滑動查看完整代碼
BUILD.gn文件:
group("gd32f303_lianzhian") {}
向右滑動查看完整代碼
此時,我們再去執行hb set,就可以看到我們自己創建的工程了:gd32f303_lianzhian
2、設計思想
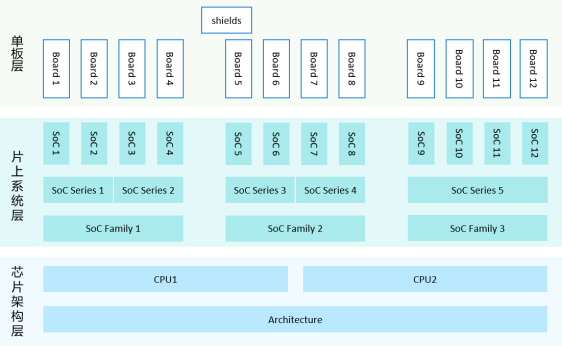
最新的master分支的代碼設計采用Board和SoC解耦的設計思路,具體可以看這個文章:按照硬件進行層次劃分為芯片架構層、片上系統層和單板層。從下向上依次進行包含關系,例如:
(1)架構
ARMv7E-M架構具有ARM Cortex-M4, ARM Cortex-M7等CPU實現。
(2)芯片系列
ARM Cortex-M4 CPU對應的SoC Family有STmicro STM32、NXP i.MX等,反過來,如圖SoC Family 2跨越CPU1和CPU2,意味著一個SoC Family可以包含多個CPU實現,例如STMicro STM32可以包含Cortex-M0、Cortex-M4等CPU,又例如復雜的STM32MP157 SoC包含兩個Cortex-A7 CPU核與一個Cortex-M4 CPU核,對于異構多核SoC,需要通過OpenAMP來進行分解成多個同構多核的部分。
(3)芯片與開發板對應關系
STM32 SoC Family有STM32F4、STM32G4等SoC Series。
STM32F4 SoC Series 有 STM32F401、STM32F429等SoC。
STM32F429 SoC 有 野火STM32F429挑戰者開發板、正點原子stm32f429阿波羅開發板等。
如圖Board 5上面還有一個shields,意味著一個Board可以通過增加擴展板的形式來提供更強的功能。例如,單板可以利用串口通信外接Hi3861模組,以提供WLAN能力。
基于硬件結構劃分層次圖,OpenHarmony頂層目錄結構設計如下:
3、board配置
1)創建 board文件夾當我們輸入hb set命令后,我們選擇 gd32f303_lianzhian 可以看到會提示報錯:我們需要創建該文件夾:device/board/lianzhian,為啥是lianzhian ?
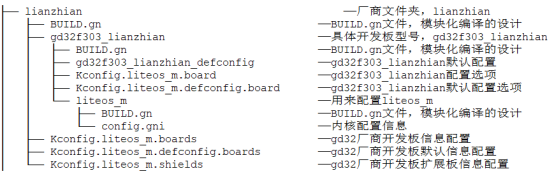
因為我們在vendor中的config.json中指定了device_company 設備廠家是lianzhian,大家可以回頭看看,標準的board文件夾目錄結構如下:
2)Kconfig配置文件
我們可以在kernel/liteos_m內核目錄下執行make menuconfig進行圖形化配置,Makefile文件會遍歷board下的所有Kconfig文件,所以我們需要添加對應的Kconfig文件。
這里內核是分層設計的,即廠商配置和具體開發板分開,一個廠商下面可以有多個開發板。
例如我們現在移植的設備廠商是是lianzhian,那么lianzhian是廠商文件夾,lianzhian下面有Kconfig,主要是廠商級別的配置。
然后lianzhian下面可以有多個開發板,我們這里只寫了gd32f303_lianzhian開發板。同樣gd32f303_lianzhian文件夾下面也有Kconfig配置文件。
3)廠商Kconfig配置文件
我們先看下lianzhian廠商的Kconfig文件
(1)Kconfig.liteos_m.boards 文件內容:
orsource "*/Kconfig.liteos_m.board"
可以看到很簡單,事實上它就是簡單的把當前目錄下的所有文件夾下的Kconfig.liteos_m.board文件都導入進來。
(2)Kconfig.liteos_m.defconfig.boards文件
orsource "*/Kconfig.liteos_m.defconfig.board"
同樣把當前目錄下的所有文件夾下的Kconfig.liteos_m.defconfig.board文件都導入進來。
(3)Kconfig.liteos_m.shields 文件
這里我們暫時不需要,可以內容為空
4)具體開發板的Kconfig配置文件
我們先看下gd32f303_lianzhian廠商的Kconfig文件。
(1)Kconfig.liteos_m.board文件:
需要配置選擇該單板的選項,以及它依賴的SoC
config BOARD_GD32F303_LIANZHIANbool "select board gd32f303 lianzhian"depends on SOC_GD32F303 #只有當我們芯片型號選擇為GD32F303時才可見
向右滑動查看完整代碼
這里是增加一個配置選項,即后面我們可以在make menuconfig中看到"select board gd32f303 lianzhian"配置項。
(2)Kconfig.liteos_m.defconfig.board 文件
需要配置選擇該單板后,默認定義 BOARD 的名字,該文件我們可以留空,也可以如下配置:
if BOARD_GD32F303_LIANZHIANconfig BOARDstringdefault "gd32f303_lianzhian"endif #BOARD_GD32F303_LIANZHIAN
向右滑動查看完整代碼
(3)gd32f303_lianzhian_defconfig 文件
內容為:
LOSCFG_BOARD_GD32F303_LIANZHIAN=yLOSCFG_SOC_SERIES_GD32F303=yLOSCFG_SOC_GD32F303ZET6=y
向右滑動查看完整代碼
這里表示我們選中的板卡、SOC、SOC具體子型號系列等。
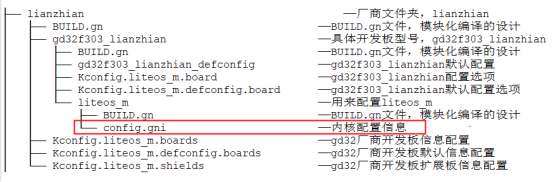
5)config.gni配置文件
liteos_m文件夾下的config.gni文件是用來進行內核配置的
該文件內容如下:
# Copyright (C) 2020 Hisilicon (Shanghai) Technologies Co., Ltd. All rights reserved.# 選擇內核類型, e.g. "linux", "liteos_a", "liteos_m".kernel_type = "liteos_m"# 內核版本,留空即可.kernel_version = ""# 芯片架構, e.g. "cortex-a7", "riscv32".board_cpu = "cortex-m4"# 這里一般不用謝, e.g. "armv7-a", "rv32imac".board_arch = ""# Toolchain name used for system compiling.# E.g. gcc-arm-none-eabi, arm-linux-harmonyeabi-gcc, ohos-clang, riscv32-unknown-elf.# Note: The default toolchain is "ohos-clang". It's not mandatory if you use the default toolchain.# 交叉編譯器名稱board_toolchain = "arm-none-eabi-gcc"# The toolchain path instalLED, it's not mandatory if you have added toolchain path to your ~/.bashrc.# 這里一般可以不寫board_toolchain_path = ""# 交叉編譯器Compiler prefix.board_toolchain_prefix = "arm-none-eabi-"# 編譯器類型 Compiler type, "gcc" or "clang".board_toolchain_type = "gcc"# 編譯選項Board related common compile flags.board_cflags = ["-mcpu=cortex-m4","-mfpu=fpv4-sp-d16","-mfloat-abi=hard","-mthumb","-Og",# "-g",#"-Wall","-fdata-sections","-ffunction-sections",# 注意,這里我們需要定義GD32F30X_HD宏"-DGD32F30X_HD",# 我們需要浮點數計算"-D__FPU_PRESENT",]board_cxx_flags = board_cflagsboard_ld_flags = []# 頭文件路徑,一般需要soc相關 Board related headfiles search path.board_include_dirs = ["${ohos_root_path}device/soc/gd32/gd32f303/liteos_m","${ohos_root_path}device/soc/gd32/CMSIS","${ohos_root_path}device/soc/gd32/CMSIS/GD/GD32F30x/Include","${ohos_root_path}device/soc/gd32/gd32f303/GD32F3XX_Driver/Inc","${ohos_root_path}device/soc/gd32/gd32f303","${ohos_root_path}utils/native/lite/include","${ohos_root_path}kernel/liteos_m/components/cpup","${ohos_root_path}kernel/liteos_m/components/exchook",]# 開發板用到哪個soc Board adapter dir for OHOS components.board_adapter_dir = "${ohos_root_path}device/soc/gd32"# Sysroot path.board_configed_sysroot = ""# Board storage type, it used for file system generation.storage_type = ""
向右滑動查看完整代碼
4、SOC配置
1)創建 SOC文件夾我們進入到device/soc文件夾,創建 gd32文件夾,gd32文件夾內容如下:
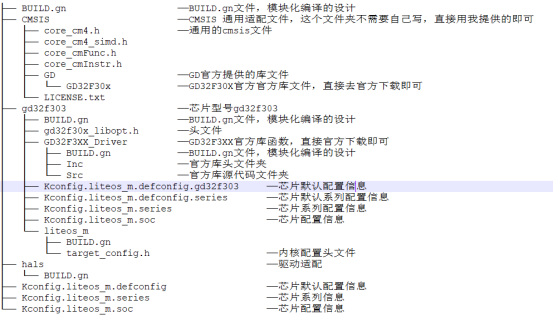
其中GD32官方標準庫文件和CMSIS都可以在GD官網下載到,而且不需要我們修改編寫,故而本節不會講其中的內容,重點放在Kconfig配置文件中。
同樣,soc也是分為芯片廠家的Kconfig 和具體芯片信號的Kconfig,gd32是芯片廠家,gd32f303只是其中的一款型號而已。
2)gd32芯片廠家Kconfig配置文件
(1)先看Kconfig.liteos_m.soc文件
config SOC_COMPANY_GD32boolif SOC_COMPANY_GD32config SOC_COMPANYdefault "gd32"rsource "*/Kconfig.liteos_m.soc"endif # SOC_COMPANY_GD32
向右滑動查看完整代碼
這里很簡單,就是配置我們的芯片廠商默認為 gd32,之后導入所有文件夾的 Kconfig.liteos_m.soc 配置文件。
(2)Kconfig.liteos_m.series文件
這個文件就比較簡單了,導入所有文件夾的 Kconfig.liteos_m.series 配置文件
rsource "*/Kconfig.liteos_m.series"
向右滑動查看完整代碼
(3)Kconfig.liteos_m.defconfig
同樣,導入所有文件夾的Kconfig.liteos_m.defconfig
rsource "*/Kconfig.liteos_m.defconfig.series"
向右滑動查看完整代碼
3)gd32F303芯片的Kconfig配置文件
我們來看看具體的芯片型號gd32f303的配置文件吧
(1)Kconfig.liteos_m.series文件
需要配置芯片系列,以及它的芯片架構等信息,內容:
config SOC_SERIES_GD32F303bool "GD32F303 chip"select ARMselect SOC_COMPANY_GD32select CPU_CORTEX_M4helpEnable support for GD32F303
向右滑動查看完整代碼
這個是芯片系列的選擇,我們的芯片系列是GD32F303,架構是ARM、CORTEX_M4 芯片廠家是 SOC_COMPANY_GD32,這個在上一級gd32的Kconfig配置文件中有定義。
(2)Kconfig.liteos_m.soc文件
需要配置芯片系列有多少個型號的芯片。內容:
choiceprompt "GD32F303 series SoC"depends on SOC_SERIES_GD32F303 #只有選擇了芯片系列SOC_SERIES_GD32F303后才會出現如下選項config SOC_GD32F303ZET6 #增加一個SOC_GD32F303ZET6選項,我們現在只有GD32F303ZET6,后面可以還有GD32F303RCT6等。bool "SoC GD32F303ZET6"endchoice
向右滑動查看完整代碼
(3)Kconfig.liteos_m.defconfig.series 文件
選擇芯片系列后默認的配置,內容:
if SOC_SERIES_GD32F303rsource "Kconfig.liteos_m.defconfig.gd32f303"config SOC_SERIESstringdefault "gd32f303"config NUM_IRQS #中斷數量,跟具體芯片相關intdefault 90config SYS_CLOCK_HW_CYCLES_PER_SEC #時鐘周期,GD32F303是120MHzintdefault 120000000endif
向右滑動查看完整代碼
(4)Kconfig.liteos_m.defconfig.gd32f303 文件
Gd32f303的配置,內容比較簡單:
config SOCstringdefault "gd32f303zet6"depends on SOC_GD32F303ZET6
向右滑動查看完整代碼
默認是gd32f303zet6,至此我們的soc的kconfig配置基本完成。
4)內核配置頭文件
還有一個比較重要的內核配置頭文件,target_config.h。這個大家可以直接復制我的就行,主要是內核功能配置相關。
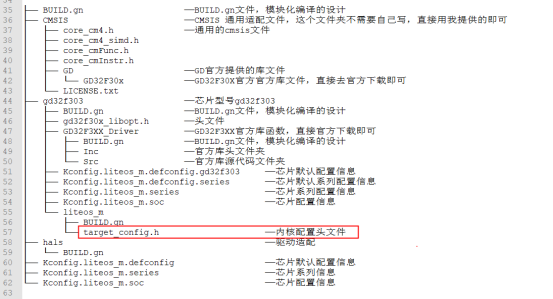
其中有一個比較重要的配置項:
/*** @ingroup los_config* Memory size*/
向右滑動查看完整代碼
這個是配置內核的堆棧大小,這里可以根據自己芯片的內存大小來定,GD32F303內存是64KB,這里我用60k即可。
5、make menuconfig配置
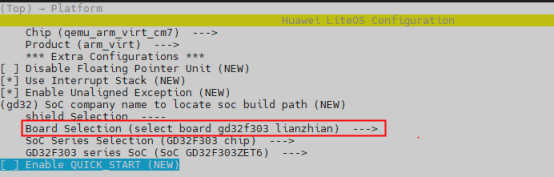
完成上面移植內容后,接下來,我們就可以進行menuconfig配置了。注意,這里我們需要先執行一次hb set選擇我們的開發板gd32f303_lianzhian。我們進入 kernel/liteos_m 文件夾執行 make menuconfig
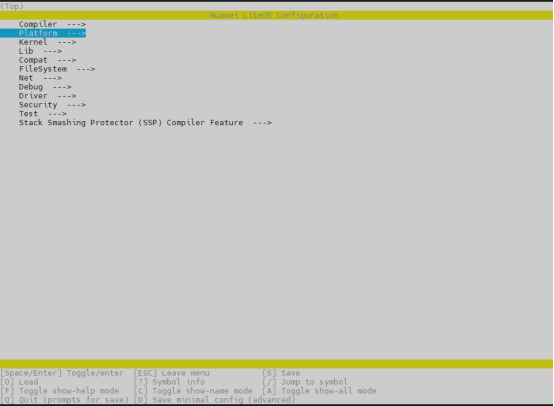
進入Platform,我們選擇gd32f303芯片、gd32f303_lianzhian開發板,如下:
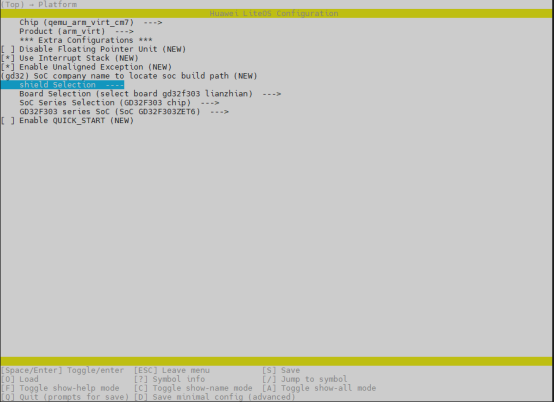
退出保存。結果將自動保$(PRODUCT_PATH)/kernel_configs/debug.config
6、gn編譯
在上一步Kconfig的圖形化配置后,將其生成的配置結果可以作為gn編譯的輸入,以控制不同模塊是否編譯。另外為了解決之前gn編寫時,隨意include的問題,內核編譯做了模塊化編譯的設計,使得整個編譯邏輯更加清晰。我們需要編寫device/board/lianzhian 和 device/soc/gd32兩個文件夾下的BUILD.gn。
這幾個BUILD.gn文件比較簡單,都是模塊化編譯,大家可以直接參考我的。
7、開始編譯
配置完BUILD.gn后,我們就可以開始執行hb build -f編譯了。可以看到已經能編譯過一大半了:
我們今天的目標就是要能讓編譯系統能開始編譯我們的開發板一步一腳印,接下來我們將繼續開始移植,接下來將配置libc庫、系統啟動、main函數、鏈接腳本,直到編譯通過并且在開發板中成功運行~
本節Board和SoC解耦的設計思路就分享到這里了,下一篇我們給大家分享:Board、SOC、架構與代碼對應關系,歡迎大家持續關注哦~
原文標題:從零移植OpenHarmony輕量系統【2】Board和SoC解耦的設計思路
文章出處:【微信公眾號:HarmonyOS官方合作社區】歡迎添加關注!文章轉載請注明出處。
-
soc
+關注
關注
38文章
4124瀏覽量
217966 -
移植
+關注
關注
1文章
377瀏覽量
28111 -
OpenHarmony
+關注
關注
25文章
3665瀏覽量
16162
原文標題:從零移植OpenHarmony輕量系統【2】Board和SoC解耦的設計思路
文章出處:【微信號:HarmonyOS_Community,微信公眾號:電子發燒友開源社區】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
求助解答關于異步電機矢量控制中磁鏈環和電壓前饋解耦問題??
永磁同步電機偏差解耦和電流前饋解耦控制比較
常用的解耦設計方法
從零移植OpenHarmony輕量系統【1】移植思路
從零移植OpenHarmony輕量系統【2】Board和SoC解耦的設計思路
多變量解耦控制實驗
基于補償器的解耦控制方法的研究
基于H∞混合靈敏度解耦控制器實現BTT導彈自動駕駛儀的解耦設計
電容解耦如何放置
永磁同步電機控制之反饋解耦及復矢量解耦






 工商網監
工商網監
評論