") KUKA機器人PN系統(tǒng)網(wǎng)絡(luò)故障的判斷方法
KUKA機器人PN系統(tǒng)網(wǎng)絡(luò)故障的判斷方法
1.使用拓?fù)浣Y(jié)構(gòu)
前提: 廠家已經(jīng)作好拓?fù)浣Y(jié)構(gòu)圖。
方法:在帶有菜單命令 Edit (編輯 ) > PROFINETIO > Topology (拓?fù)洌┑?HW Config或 NetPro
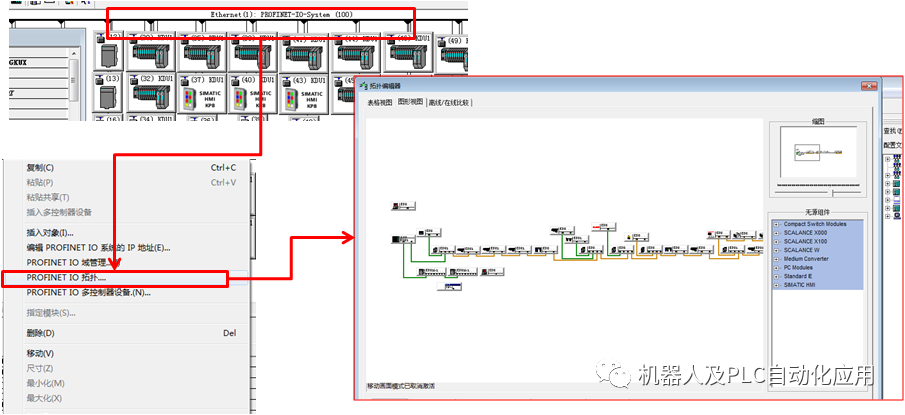
優(yōu)點:
可以判斷PN網(wǎng)絡(luò)故障的具體區(qū)域范圍。
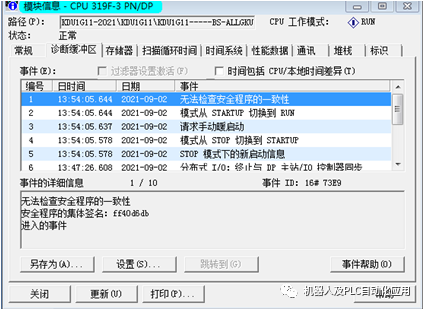
2.使用CPU診斷緩沖區(qū)來處理PN網(wǎng)絡(luò)問題:
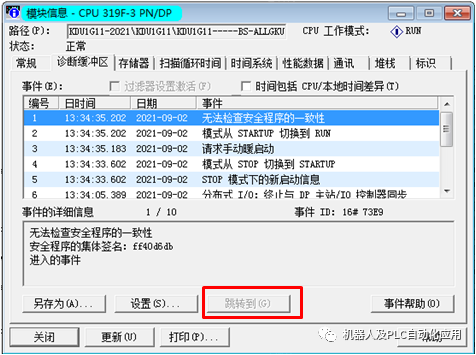
在現(xiàn)場中可以通過“跳轉(zhuǎn)到”來找到報警輸出的具體的現(xiàn)場設(shè)備站.
可以在以下兩種情況下選擇"跳轉(zhuǎn)到"按鈕:
?有一個對診斷事件中塊相對地址的引用。
?有一個對診斷事件中模塊或PNIO設(shè)備的引用。
3.通過硬件組態(tài)在線的方法來處理PN網(wǎng)絡(luò)問題:
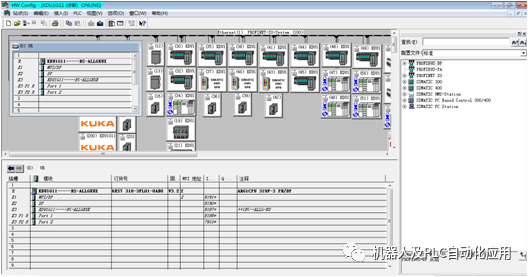
通過雙擊故障模塊,或者故障模塊的插槽點出現(xiàn)的“模塊信息”判斷故障點。
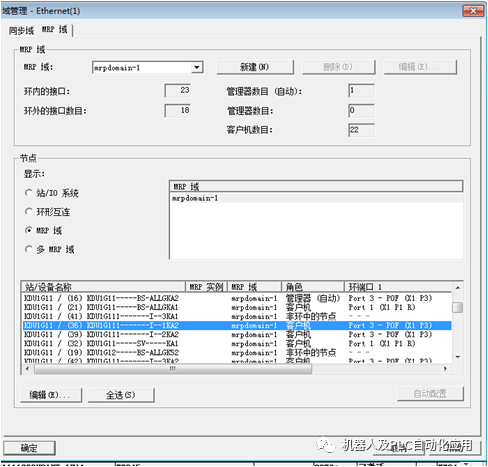
4.更換交換機的注意事項。交換機在激活環(huán)網(wǎng)的組態(tài)設(shè)備中不能有兩個管理機.所以為了避免患上的交換機是曾經(jīng)用過的交換機自帶原有網(wǎng)絡(luò)的屬性,而使得新網(wǎng)絡(luò)出現(xiàn)網(wǎng)絡(luò)風(fēng)暴!在交換機作為備件進(jìn)行更換前進(jìn)行初始化。
5.偶發(fā)鈍化引起的網(wǎng)絡(luò)故障。
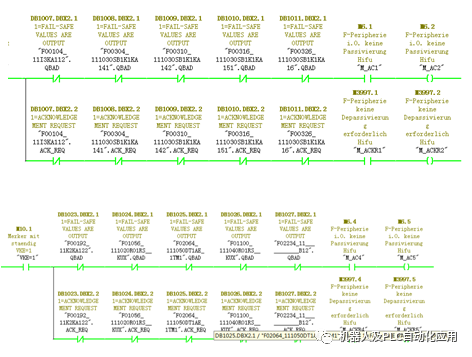
5.1.通過CPU報警提示-診斷緩沖區(qū)確定設(shè)備端口。
5.2.通過查找PLC程序確定設(shè)備端口。
通過VASS對安全設(shè)備的安全DB塊上的點進(jìn)行監(jiān)控.
二.KUKA機器人PN系統(tǒng)網(wǎng)絡(luò)故障的判斷方法:
1.通過WorkVisual的PN 的拓?fù)涔δ苓M(jìn)行網(wǎng)絡(luò)診斷
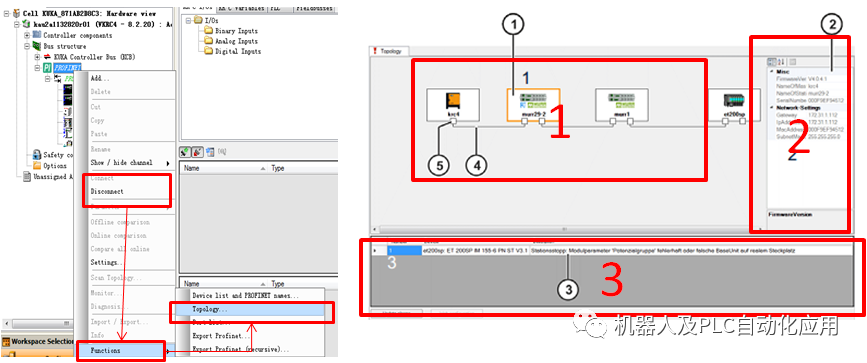
如果設(shè)備顯示為白色,則存在一個與此設(shè)備的連接。如果設(shè)備顯示為灰色,則不存在與此設(shè)備的連接。
2 參數(shù)窗口
為所選的設(shè)備顯示不同的參數(shù)。
3 信息窗口
如果設(shè)備報錯,則顯示該信息提示窗口。點擊 更新警報 按鈕可更新顯示。
2.通過機器人KRC診斷顯示.
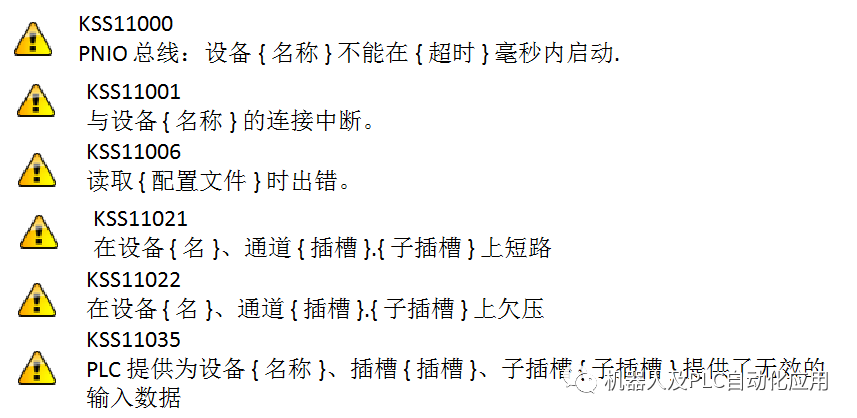
3.通過SmartPAD診斷監(jiān)視器進(jìn)行診斷.診斷> 診斷監(jiān)視器
工業(yè)以太網(wǎng)輸入輸出驅(qū)動程序 (PNIODriver)
工業(yè)以太網(wǎng)控制堆棧 (PNIO-CTRL)
工業(yè)以太網(wǎng)設(shè)備
工業(yè)以太網(wǎng)設(shè)備棧 (PNIO-DEV)
察看工業(yè)以太網(wǎng)設(shè)備的通訊狀態(tài):

-
cpu
+關(guān)注
關(guān)注
68文章
10824瀏覽量
211138 -
網(wǎng)絡(luò)
+關(guān)注
關(guān)注
14文章
7514瀏覽量
88626 -
KUKA機器人
+關(guān)注
關(guān)注
4文章
143瀏覽量
9053
原文標(biāo)題:西門PLCS7-300/400系列及KUKA機器人PN網(wǎng)絡(luò)故障的判斷方法:
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
FMEA在工業(yè)機器人故障預(yù)防中的應(yīng)用
ROS讓機器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
機器人神經(jīng)網(wǎng)絡(luò)系統(tǒng)的特點包括
機器人神經(jīng)網(wǎng)絡(luò)控制原理是什么
Al大模型機器人
abb機器人系統(tǒng)密鑰在哪
機器人控制系統(tǒng)按控制方法可哪些種類
Kuka機器人配置Profinet通訊網(wǎng)關(guān)HT3S-PNS-ECS

工業(yè)級路由器如何解決網(wǎng)絡(luò)故障?
FMEA與智能機器人:提升機器人可靠性與安全性的關(guān)鍵
聯(lián)網(wǎng)自動駕駛機器人的網(wǎng)絡(luò)安全






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論