") PLC控制/監(jiān)控機(jī)器人抓手故障的編寫
PLC控制/監(jiān)控機(jī)器人抓手故障的編寫
PLC控制/監(jiān)控機(jī)器人的抓手狀態(tài)的功能塊FB250

選擇維護(hù)位置
采用“維護(hù)”(Maintenance) 按鈕(切換功能),可以選擇維護(hù)位置或?qū)ζ溥M(jìn)行確認(rèn)。到達(dá)維護(hù)位置時(shí),其文本將從“維護(hù)”變成“維護(hù)確認(rèn)”。
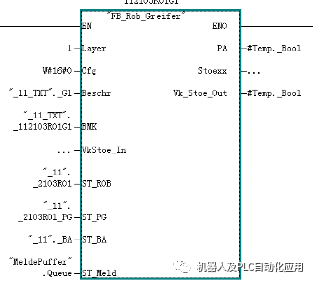
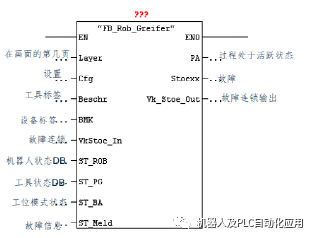
Beschr :工具標(biāo)簽:


機(jī)器人反饋故障:
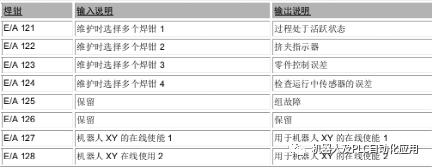
PA := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=0));
A121激活工具
xFVA := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=1));
A122夾爪K91不到位故障
xFBTK := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=2));
A123零件檢查錯(cuò)誤
xFSLS := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=3));
A124搜索傳感器錯(cuò)誤
xFSST := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=4));
A125總故障
注: 抓手的報(bào)警和別的工具不同,抓手的報(bào)警A122 ,A125,A121都是編輯在MAKRO342/MAKRO343里,零件檢測(cè)A123, A124需要在程序里編輯.
-
傳感器
+關(guān)注
關(guān)注
2548文章
50667瀏覽量
751947 -
機(jī)器人
+關(guān)注
關(guān)注
210文章
28195瀏覽量
206507 -
plc
+關(guān)注
關(guān)注
5008文章
13150瀏覽量
462052
原文標(biāo)題:VASS :PLC-機(jī)器人抓手故障的編寫
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
焊接機(jī)器人常見(jiàn)故障及排查
FMEA在工業(yè)機(jī)器人故障預(yù)防中的應(yīng)用
ROS讓機(jī)器人開(kāi)發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
Al大模型機(jī)器人
工業(yè)機(jī)器人數(shù)據(jù)采集遠(yuǎn)程監(jiān)控平臺(tái)是什么
工業(yè)機(jī)器人、PLC與自動(dòng)化之間的關(guān)系
PLC與機(jī)器人之間如何通訊
如何使用PLC控制機(jī)器人
機(jī)器人控制系統(tǒng)的基本單元有哪些
基于FPGA EtherCAT的六自由度機(jī)器人視覺(jué)伺服控制設(shè)計(jì)
LabVIEW的六軸工業(yè)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)
PLC對(duì)機(jī)器人的互鎖信號(hào)控制

基于導(dǎo)納控制的機(jī)器人拖動(dòng)示教原理和實(shí)現(xiàn)步驟
ROS讓機(jī)器人開(kāi)發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
機(jī)器人故障分析和解決方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論