 LIN協議簡介及數據幀結構解析
LIN協議簡介及數據幀結構解析
LIN協議在汽車電子網絡通訊中廣泛使用,很多用戶在解碼LIN協議時,對LIN協議不同版本間的差異不太熟悉,可能導致解碼中出現數據長度識別和校驗混亂。
LIN協議簡介
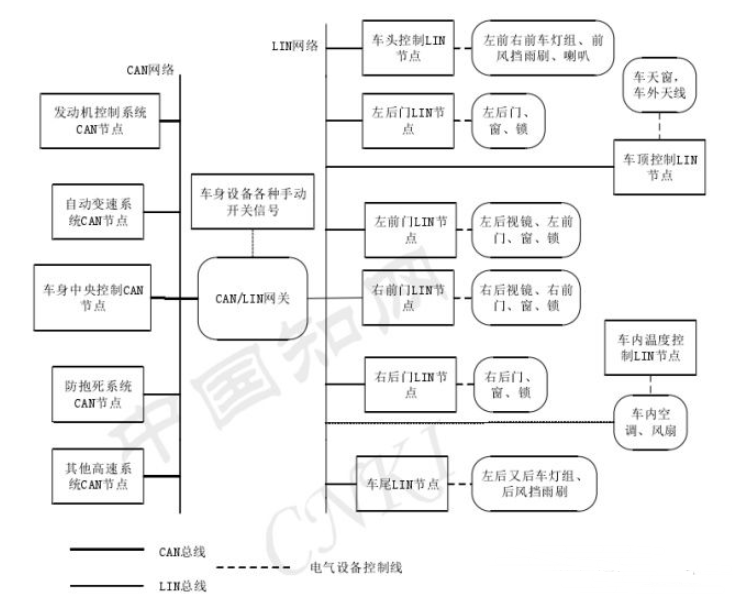
LIN的全稱為Local Interconnect Network。其主要功能是為CAN總線網絡提供輔助功能,適用于對總線性能要求不高的車身系統,如車門、車窗、燈光等智能傳感器、執行器的連接和控制,如圖1所示,為LIN總線在車身的應用。LIN是面向汽車底端分布式應用的低成本、低速率的串行通信總線,屬于局部互聯網,是SAE規范的汽車A類網絡。
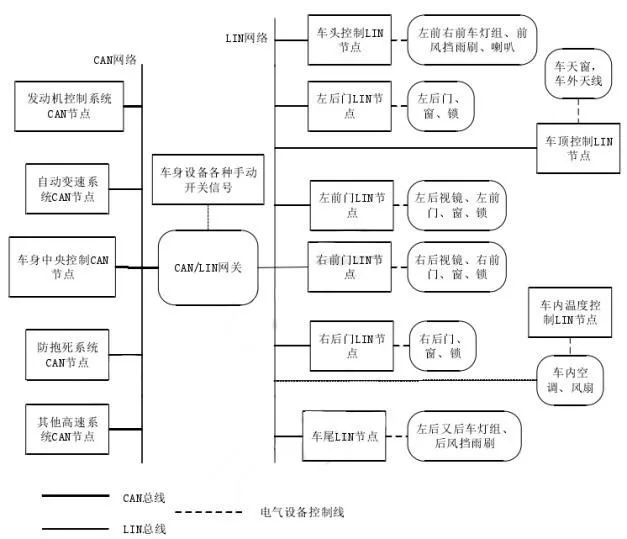
圖1 LIN在車身上的應用
LIN聯盟成立于1999年,并發布了LIN1.0版本。最初的成員有奧迪、寶馬、克萊斯勒、摩托羅拉、博世、大眾和沃爾沃等,最新的為V2.2版。如下圖2為LIN協議的發展史。
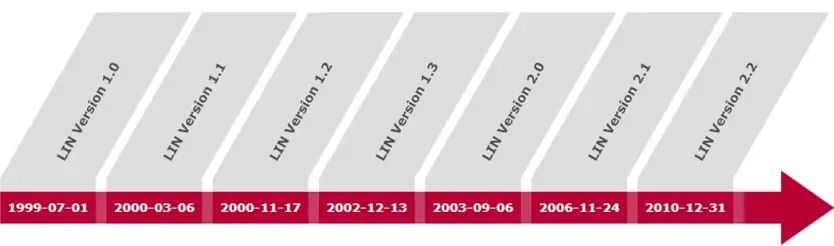
圖2 LIN協議的發展史
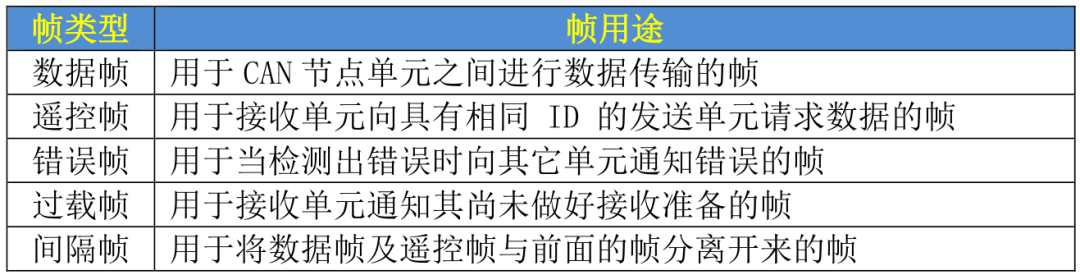
LIN協議的數據幀結構
LIN協議數據幀結構如圖3所示。
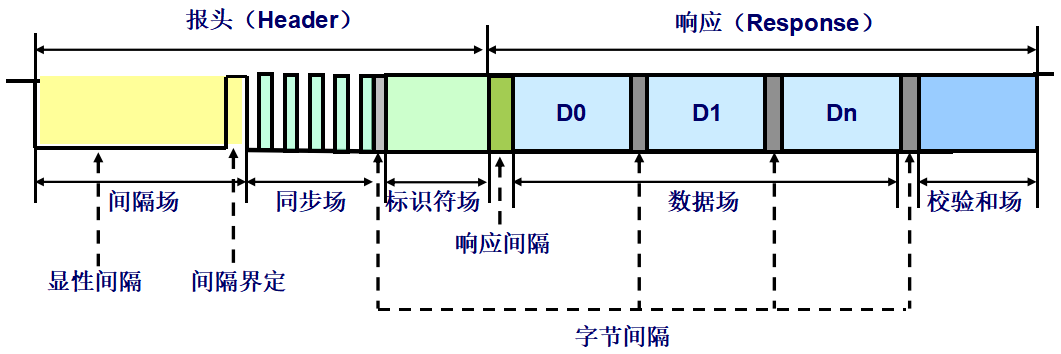
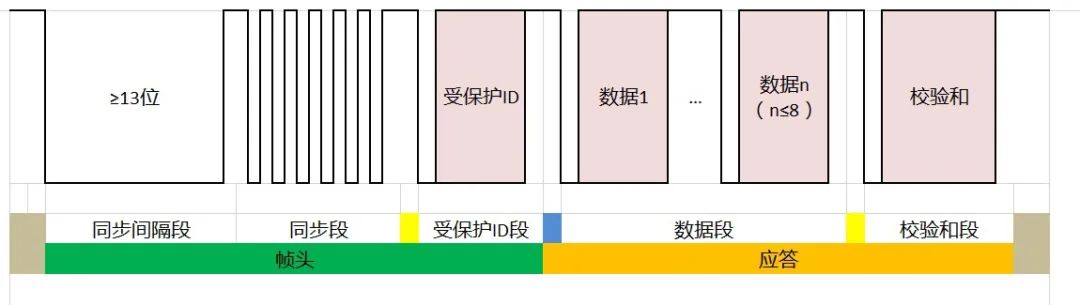
圖3 LIN協議數據幀結構
從圖3中可以看到LIN協議數據幀結構由報文頭、響應報文以及幀間隔組成。其中:
報文頭包含同步間隙、同步域和報文標識符場(0~63);
響應報文由1-9個字節構成:其中2、4或8個字節的數據場和1個校驗和場(LIN1.3);
報文幀之間有幀間間隔分隔;
報文與響應之間有幀內響應空間分隔;
最小幀間間隔和幀內響應空間均為0;
最大長度收到報文幀的最大長度FRAME_max限制。
LIN2.0相對于LIN1.3最主要的差
支持最多8個字節的數據序列;
取消了受保護標識符中的數據長度字段,即傳輸長度不再受限于ID,并將最后一個字節視為校驗和;
校驗和的驗算包括了受保護標識符。
支持自動波特率檢測功能;
對零星幀進行了定義;
網絡管理的定時用秒來定義,而不是用比特數來定義;
對于解碼來說主要關注前三點。
ZDS5000系列示波器全面支持LIN協議解碼功能致遠電子ZDS全系列示波器支持LIN1.3、LIN2.0協議全內存解碼功能,現在使用ZDS5054Pro輸入一個LIN1.3信號,使用LIN1.3和LIN2.0協議解碼會有什么樣的不同效果呢?如下圖4、圖5所示。

圖4 LIN1.3解碼

圖5 LIN2.0解碼
解析:
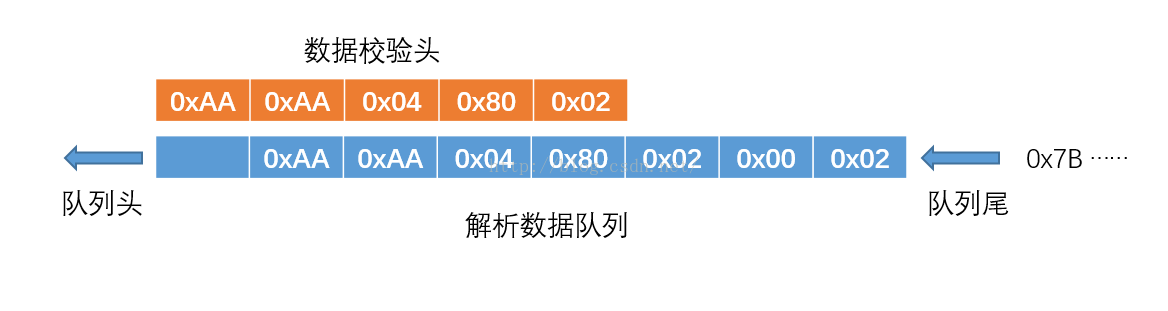
使用LIN2.0解碼LIN1.3協議出現“Checksum Wrong”的錯誤標志,代表在校驗和場上解碼錯誤,原因是LIN2.0的校驗包含“標識場”和“數據場”,而LIN1.3僅僅只校驗“數據場”,從而導致使用LIN2.0解碼LIN1.3協議時出現校驗和場數據與所校驗的數據不對應,導致解碼出錯,如圖6原理所示。
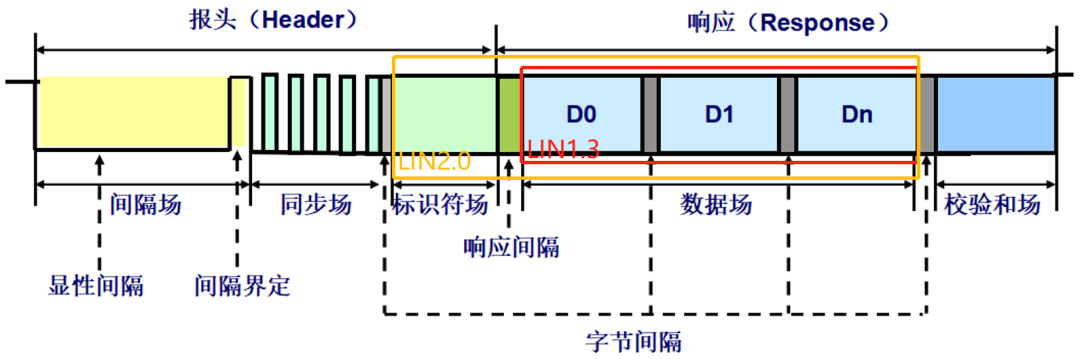
圖6 LIN協議的校驗和場
如圖7所示,為ZDS5054Pro長時間(70s)解碼示意圖。
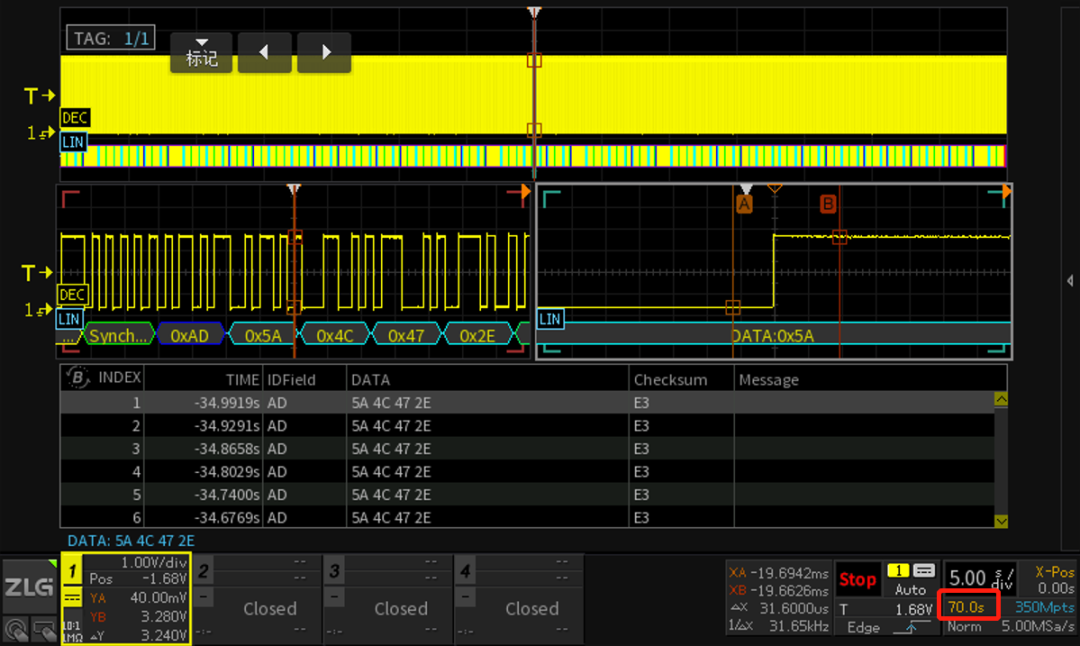
圖7 ZDS5054 Pro進行LIN協議解碼
原文標題:汽車電子之LIN協議解碼
文章出處:【微信公眾號:ZLG致遠電子】歡迎添加關注!文章轉載請注明出處。
審核編輯:湯梓紅
-
汽車電子
+關注
關注
3024文章
7883瀏覽量
166552 -
解碼
+關注
關注
0文章
180瀏覽量
27364 -
網絡通訊
+關注
關注
0文章
74瀏覽量
11249
原文標題:汽車電子之LIN協議解碼
文章出處:【微信號:ZLG_zhiyuan,微信公眾號:ZLG致遠電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
初學者如何快速學習LIN 總線(應用/分類/LIN報文/幀結構)
利用kvaser LIN寫幀
嵌入式ARM協議--LIN總線詳解
LIN總線的應用/特點/幀信號/幀結構
ymodem協議簡介
USART—LIN應用說明
USART_LIN 2.2A協議數據幀的使用方法
汽車網絡LIN總線協議解析
全面解析LIN總線的應用/幀結構/分類
LIN總線幀結構及各場干擾
如何采用“狀態機”解析UART數據幀






 工商網監
工商網監
評論