 詳解單片機三種應用程序的架構
詳解單片機三種應用程序的架構
摘要:對于單片機程序來說,大家都不陌生,但是真正使用架構,考慮架構的恐怕并不多,隨著程序開發的不斷增多,架構是非常必要的。
應用程序的架構大致有三種:
1、簡單的前后臺順序執行程序,這類寫法是大多數人使用的方法,不需用思考程序的具體架構,直接通過執行順序編寫應用程序即可。
2、時間片輪詢法,此方法是介于順序執行與操作系統之間的一種方法。
3、操作系統,此法應該是應用程序編寫的最高境界。
一、程序框架設計
1、前后臺順序執行法
這是初學者們常用的程序框架設計方案,不用考慮太多東西,代碼簡單,或者對系統的整體實時性和并發性要求不高;初始化后通過while(1){}或for(;;){}`循環不斷調用自己編寫完成的函數,也基本不考慮每個函數執行所需要的時間,大部分情況下函數中或多或少都存在毫秒級別的延時等待。
-
優點:對于初學者來說,這是最容易也是最直觀的程序架構,邏輯簡單明了,適用于邏輯簡單,復雜度比較低的軟件開發。
-
缺點:實時性低,由于每個函數或多或少存在毫秒級別的延時,即使是1ms,也會造成其他函數間隔執行時間的不同,雖然可通過定時器中斷的方式,但是前提是中斷執行函數花的時間必須短。當程序邏輯復雜度提升時,會導致后來維護人員的大腦混亂,很難理清楚該程序的運行狀態。
以下是在校期間做的寢室防盜系統的部分代碼(當時也存在部分BUG,沒有解決。現在再看,其實很多問題,而且比較嚴重,比如中斷服務函數內竟然有3000ms延時,這太可怕了,還有串口發送等等;由于實時性要求不算太高,因此主函數中的毫秒級別延時對系統運行沒有多大影響,當然除BUG外;若是后期需要維護,那就是一個大工程,還不如推翻重寫):
intmain(void)
{
u8temperature;
u8humidity;
inta;
delay_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
I2c_init();
uart2_Init(9600);
uart_init(9600);//串口初始化為115200
TIM3_Int_Init(4999,7199);
ds1302_init();
while(DHT11_Init())//DHT11初始化
{
led2=0;
}
a1602_init();
Ds1302Init();
EXTIX_Init();
GPIOX_Init();
lcd12864_INIT();
LcdInit();
beep_init();
RED_Init();
led1=1;
beep=0;
while(1)
{
for(a=0;a<11;a++)
{
num[a+3]=At24c02Read(a+2)-208;
delay_us(10);
}
for(a=0;a<6;a++)
{
shuru[a]=At24c02Read(a+13)-208;
delay_us(10);
}
delay_ms(10);
RED_Scan();
Ds1302ReadTime();//讀取ds1302的日期時間
shi=At24c02Read(0);//讀取鬧鐘保存的數據
delay_ms(10);
fen=At24c02Read(1);//讀取鬧鐘保存的數據
usart2_scan();//藍牙數據掃描
usart2_bian();//藍牙處理數據
usart2_gai();
nao_scan();
k++;
if(k<20)
{
if(k==1)
LcdWriteCom(0x01);//清屏
LcdDisplay();//顯示日期時間
}
if(RED==0)
RED_Scan();
if(k>=20&&k<30)
{
if(k==20)
LcdWriteCom(0x01);//清屏
Lcddisplay();//顯示溫濕度
LcdWriteCom(0x80+6);
DHT11_Read_Data(&temperature,&humidity);//讀取溫濕度值
Temp=temperature;Humi=humidity;
LcdWriteData('0'+temperature/10);
LcdWriteData('0'+temperature%10);
LcdWriteCom(0x80+0X40+6);
LcdWriteData('0'+humidity/10);
LcdWriteData('0'+humidity%10);
}
if(k==30)
k=0;
lcd12864();//顯示防盜鬧鐘狀態
}
}
//定時器3中斷服務程序
voidTIM3_IRQHandler(void)//TIM3中斷
{
inti;
if(TIM_GetITStatus(TIM3,TIM_IT_Update)!=RESET)//檢查TIM3更新中斷發生與否
{
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);//清除TIMx更新中斷標志
if(key1==1&&FEN-fen==0&&SHI-shi==0)//時間一到鬧鐘響起
{
f=1;
}
if(key1==0||FEN-fen!=0||SHI-shi!=0)
else
{
f=0;
}
if(USART_RX_BUF[0]=='R'&&USART_RX_BUF[1]=='I'&&USART_RX_BUF[2]=='N'&&USART_RX_BUF[3]=='G')
{
key0=1;
for(i=0;i<17;i++)
{
USART_SendData(USART1,num[i]);//向串口1發送數據
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待發送結束
USART_RX_STA=0;
}
delay_ms(3000);
for(i=0;i<3;i++)
{
USART_SendData(USART1,num1[i]);//向串口1發送數據
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待發送結束
USART_RX_STA=0;
}
}
}
}
二、時間片論法
介于前后臺順序執行法和操作系統之間的一種程序架構設計方案。該設計方案需能幫助嵌入式軟件開發者更上一層樓,在嵌入式軟件開發過程中,若遇到以下幾點,那么該設計方案可以說是最優選擇,適用于程序較復雜的嵌入式系統;
- 目前的需求設計需要完全沒有必要上操作系統。
- 任務函數無需時刻執行,存在間隔時間(比如按鍵,一般情況下,都需要軟件防抖,初學者的做法通常是延時10ms左右再去判斷,但10ms極大浪費了CPU的資源,在這段時間內CPU完全可以處理很多其他事情)
- 實時性有一定的要求。
該設計方案需要使用一個定時器,一般情況下定時1ms即可(定時時間可隨意定,但中斷過于頻繁效率就低,中斷太長,實時性差),因此需要考慮到每個任務函數的執行時間,建議不能超過1ms(能通過程序優化縮短執行時間則最好優化,如果不能優化的,則必須保證該任務的執行周期必須遠大于任務所執行的耗時時間),同時要求主循環或任務函數中不能存在毫秒級別的延時。
“如何確定每個函數的任務周期呢?根據任務的耗時和效果決定、如按鍵掃描任務周期為 10ms(為了提高響應),指示燈控制任務周期為 100ms(通常情況下最高100ms的閃爍頻率正好,特殊需求除外),LCD/OLED 顯示周期為 100ms(通過這種通過SPI/IIC等接口的方式耗時大約在 1~10ms,甚至更長,所以任務周期必須遠大于耗時,同時為了滿足人眼所能接受的刷屏效果,也不能太長,100ms 的任務周期比較合適)等。
”
以下介紹兩種不同的實現方案,分別針對無函數指針概念的朋友和想進一步學習的朋友。
1、無函數指針的設計方式
/**
*@brief主函數.
*@paramNone.
*@returnNone.
*/
intmain(void)
{
System_Init();
while(1)
{
if(TIM_1msFlag)//1ms
{
CAN_CommTask();//CAN發送/接收通信任務
TIM_1msFlag=0;
}
if(TIM_10msFlag)//10ms
{
KEY_ScanTask();//按鍵掃描處理任務
TIM_10msFlag=0;
}
if(TIM_20msFlag)//20ms
{
LOGIC_HandleTask();//邏輯處理任務
TIM_20msFlag=0;
}
if(TIM_100msFlag)//100ms
{
LED_CtrlTask();//指示燈控制任務
TIM_100msFlag=0;
}
if(TIM_500msFlag)//500ms
{
TIM_500msFlag=0;
}
if(TIM_1secFlag)//1s
{
WDog_Task();//喂狗任務
TIM_1secFlag=0;
}
}
}
/**
*@brief定時器3中斷服務函數.
*@paramNone.
*@returnNone.
*/
voidTIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET)//溢出中斷
{
sg_1msTic++;
sg_1msTic%1==0?TIM_1msFlag=1:0;
sg_1msTic%10==0?TIM_10msFlag=1:0;
sg_1msTic%20==0?TIM_20msFlag=1:0;
sg_1msTic%100==0?TIM_100msFlag=1:0;
sg_1msTic%500==0?TIM_500msFlag=1:0;
sg_1msTic%1000==0?(TIM_1secFlag=1,sg_1msTic=0):0;
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);//清除中斷標志位
}
2、含函數指針的設計方式
/**
*@brief任務函數相關信息結構體定義.
*/
typedefstruct{
uint8m_runFlag;/*!
uint16m_timer;/*!
uint16m_itvTime;/*!
void(*m_pTaskHook)(void);/*!
}TASK_InfoType;
#defineTASKS_MAX5//定義任務數目
/**任務函數相關信息*/
staticTASK_InfoTypesg_tTaskInfo[TASKS_MAX]={
{0,1,1,CAN_CommTask},//CAN通信任務
{0,10,10,KEY_ScanTask},//按鍵掃描任務
{0,20,20,LOGIC_HandleTask},//邏輯處理任務
{0,100,100,LED_CtrlTask},//指示燈控制任務
{0,1000,1000,WDog_Task},//喂狗任務
};
/**
*@brief任務函數運行標志處理.
*@note該函數由1ms定時器中斷調用
*@paramNone.
*@returnNone.
*/
voidTASK_Remarks(void)
{
uint8i;
for(i=0;iif(sg_tTaskInfo[i].m_timer)
{
sg_tTaskInfo[i].m_timer--;
if(0==sg_tTaskInfo[i].m_timer)
{
sg_tTaskInfo[i].m_timer=sg_tTaskInfo[i].m_itvTime;
sg_tTaskInfo[i].m_runFlag=1;
}
}
}
}
/**
*@brief任務函數運行處理.
*@note該函數由主循環調用
*@paramNone.
*@returnNone.
*/
voidTASK_Process(void)
{
uint8i;
for(i=0;iif(sg_tTaskInfo[i].m_runFlag)
{
sg_tTaskInfo[i].m_pTaskHook();//運行任務
sg_tTaskInfo[i].m_runFlag=0;//標志清0
}
}
}
/**
*@brief主函數.
*@paramNone.
*@returnNone.
*/
intmain(void)
{
System_Init();
while(1)
{
TASK_Process();
}
}
/**
*@brief定時器3中斷服務函數.
*@paramNone.
*@returnNone.
*/
voidTIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET)//溢出中斷
{
TASK_Remarks();
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);//清除中斷標志位
}
三、操作系統
嵌入式操作系統EOS(Embedded OperatingSystem)是一種用途廣泛的系統軟件,過去它主要應用于工業控制和國防系統領域,而對于單片機來說,比較常用的有UCOS、FreeRTOS、RT-Thread Nano和RTX 等多種搶占式操作系統(其他如Linux等操作系統不適用于單片機)
操作系統和“時間片論法”,在任務執行方面來說,操作系統對每個任務的耗時沒有過多的要求,需要通過設置每個任務的優先級,在高優先級的任務就緒時,會搶占低優先級的任務;操作系統相對復雜,因此這里沒有詳細介紹了。
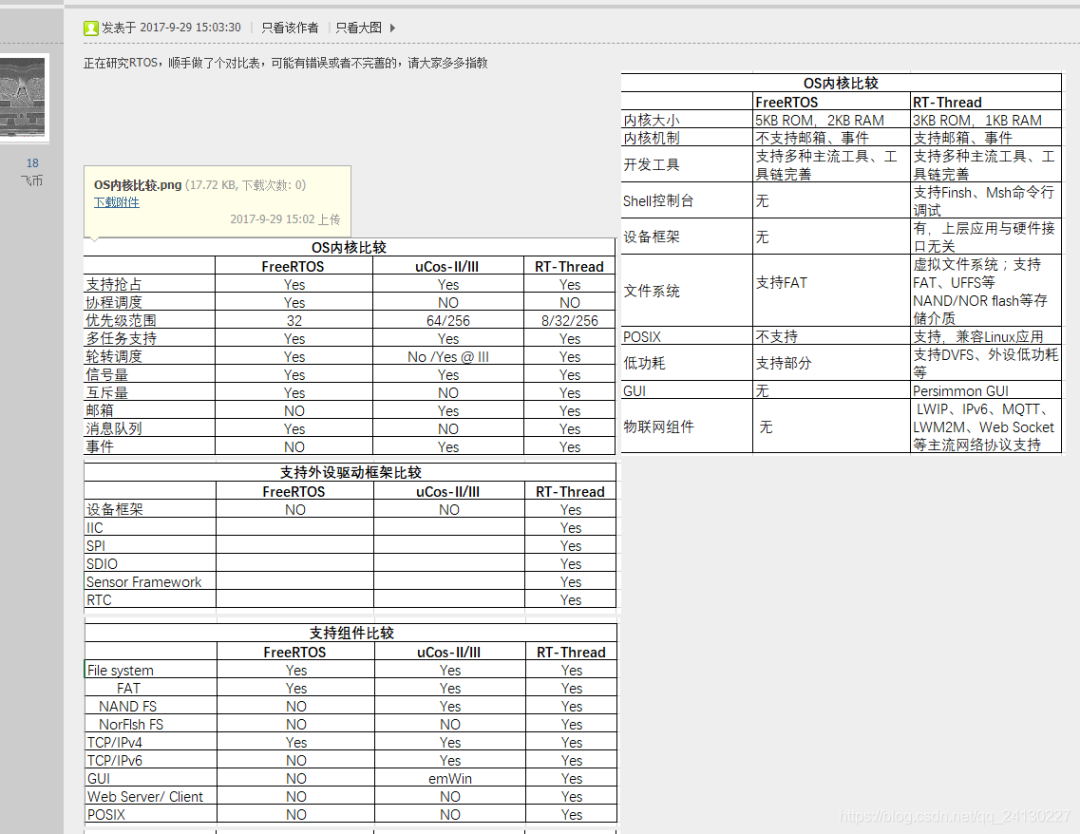
關于如何選擇合適的操作系統(uCOS、FreeRTOS、RTThread、RTX等RTOS的對比之特點:
- uCOS:網上資料豐富,非常適合學習,但是在產品上使用則需要收費。
- FreeRTOS:使用免費,因此很多產品都在用。
- RT-Thread:國產物聯網操作系統,有著十分豐富的組件,也免費,資料:RT-Thread文檔中心。
- RTX:為ARM和Cortex-M設備設計的免版稅,確定性的實時操作系統。
借網上一張對比圖:
四、總結
從上述的對比中可以看出,時間片輪詢法的優勢還是比較大的,它既有前后臺順序執行法的優點,也有操作系統的優點。結構清晰,簡單,非常容易理解,所以這種是比較常用的單片機設計框架。
原文標題:嵌入式軟件開發常用的3種架構
文章出處:【微信公眾號:嵌入式ARM】歡迎添加關注!文章轉載請注明出處。
審核編輯:湯梓紅
-
單片機
+關注
關注
6032文章
44525瀏覽量
633257 -
嵌入式
+關注
關注
5072文章
19026瀏覽量
303515 -
應用程序
+關注
關注
37文章
3245瀏覽量
57614 -
架構
+關注
關注
1文章
510瀏覽量
25451
原文標題:嵌入式軟件開發常用的3種架構
文章出處:【微信號:gh_c472c2199c88,微信公眾號:嵌入式微處理器】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
單片機大致應用程序的架構有三種
單片機MCU應用程序架構的相關資料分享
怎樣架構你的單片機程序
單片機大致應用程序的架構總結
單片機的應用程序架構有哪些?三種架構的詳細資料和代碼說明
干貨:一文搞懂單片機應用程序架構
單片機大致應用程序的三種架構總結、方法的利弊和適應范圍
三種單片機應用程序的架構的利弊和適應范圍資料下載

嵌入式軟件開發三種程序架構詳解

單片機MCU應用程序架構
一文搞懂單片機應用程序架構





 工商網監
工商網監
評論