") Micro-ROS:把ROS2放在MCU上
Micro-ROS:把ROS2放在MCU上
對于熟悉機(jī)器人應(yīng)用的讀者,ROS想必定是不會陌生的。ROS可以說是目前機(jī)器人相關(guān)開源社區(qū)最流行的項目。每一種類型的機(jī)器人都需要以硬件的實際情況編寫符合用戶需要的功能,起初代碼的復(fù)用率很低,大大阻礙了機(jī)器人的發(fā)展。
ROS便是為機(jī)器人在研發(fā)的過程中的代碼復(fù)用提供支持的開源框架,大量的機(jī)器人開源項目,從感知到控制、從定位到構(gòu)圖、從導(dǎo)航到可視化,幾乎都使用ROS作為基礎(chǔ)。
Micro-ROS從何而來?
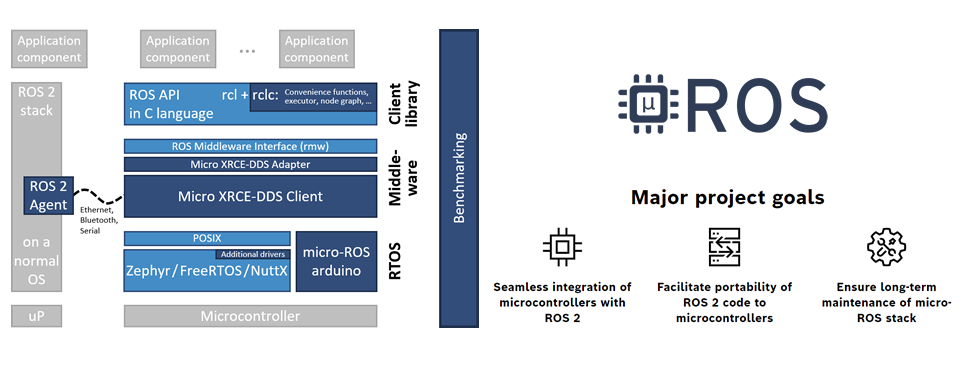
Micro-ROS實際上是從ROS2優(yōu)化而來的輕量級ROS系統(tǒng),用于在各種機(jī)器人應(yīng)用中在MCU上實現(xiàn)第二代機(jī)器人操作系統(tǒng)ROS 2,通過使用通用框架,它可以實現(xiàn)與傳統(tǒng)機(jī)器人、物聯(lián)網(wǎng)傳感器和設(shè)備的互操作性。ROS2基于ROS升級而來,如果說ROS為機(jī)器人研究和機(jī)器人原型開發(fā)提供了良好?態(tài)的話,那么ROS2就是?于機(jī)器人部署環(huán)境的開發(fā)架構(gòu)和相應(yīng)的工具鏈。
傳統(tǒng)機(jī)器人ROS實質(zhì)上是仍舊停留在MCU邊界的,再通過串行協(xié)議或者舊版ROS中的工具與MCU集成在一起。Micro-ROS則允許在硬件級別附近運(yùn)行ROS2節(jié)點,所有硬件外設(shè)都可用于該應(yīng)用程序,從而使其能夠直接與低級總線系統(tǒng)進(jìn)行交互,亦與傳感器和執(zhí)行器接口互通。
(Micro-ROS,Micro-ROS開源社區(qū))
ROS2解決了ROS在很多層面上無法滿足的性能升級的短板,諸如:實時性、對MCU的支持、網(wǎng)絡(luò)通信的依賴程度、多機(jī)器人的支持等等。原生的ROS其實只支持單個機(jī)器人,對于多機(jī)器人的支持是不足的,而且大型機(jī)器人項目的構(gòu)建、開發(fā)和部署這些需求ROS逐漸不能滿足。實時性、安全性、嵌?式移植等方面,在工業(yè)領(lǐng)域也讓時常無法匹配某系性能的要求。
Micro-ROS在解決了多機(jī)器人支持、非理想網(wǎng)絡(luò)環(huán)境支持、實時系統(tǒng)支持之外,最重要的就是對MCU直接的支持。Micro-ROS將不再停留在MCU的邊界通過串行協(xié)議集成。ROS2采?RTSP(Real-Time Publish-Subscribe)協(xié)議的DDS作為中間層,DDS作為?種?于實時和嵌?式系統(tǒng)發(fā)布-訂閱式通信的?業(yè)標(biāo)準(zhǔn),在系統(tǒng)容錯和靈活性上會更加完善。Micro-ROS同時可以利用其中間件可插拔性來使用針對MCU進(jìn)行了優(yōu)化的DDS-XRCE。
基于Micro-ROS的機(jī)器人控制MCU
Micro-ROS旨在將ROS2引入廣泛的微控制器,主要目標(biāo)就是中檔32位微控制器系列。一般來說,Micro-ROS 需要具有幾萬字節(jié)RAM內(nèi)存的MCU和能夠?qū)崿F(xiàn)Micro-ROS客戶端到代理通信的通信外圍設(shè)備。Micro-ROS支持的硬件目前分為官方支持的板和社區(qū)板。這里挑幾個官方支持的Micro-ROS機(jī)器人本體控制MCU。
瑞薩RA6M5 Micro-ROS
瑞薩電子與Micro-ROS框架供應(yīng)商eProsima合作,開發(fā)了基于RA6M5的ROS機(jī)器人本體控制器,將Micro-ROS完全集成到了EK RA6M5 MCU中。該系統(tǒng)能夠基于ROS控制多個伺服系統(tǒng)。
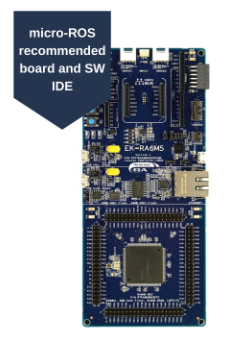
(瑞薩)
32位的RA6M5 MCU是高性能Arm Cortex-M33內(nèi)核,521KB內(nèi)存,閃存高達(dá)2MB。集成了能夠用于在ROS節(jié)點之間進(jìn)行 Pub/Sub信息傳遞的通信接口,可以通過單線 UART 和 RS-485 控制多個伺服系統(tǒng)。該官方板支持的實時操作系統(tǒng)為FreeRTOS、ThreadX和裸機(jī)。
樂鑫ESP32 Micro-ROS
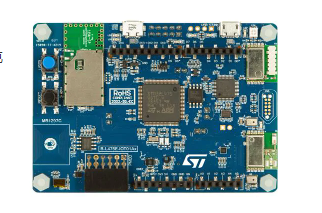
Xtensa雙核32位LX6微處理器,最高240 MHz,520KB的內(nèi)存以及高達(dá)4MB的閃存,在外設(shè)支持上是官方板中最多的,以太網(wǎng) MAC、Wi-Fi 802.11 b/g/n、藍(lán)牙 v4.2 BR/EDR、BLE、SPI、I2C、I2S、UART、SDIO、CAN、GPIO、ADC/DAC、PWM全部覆蓋。對實時操作系統(tǒng)的支持目前僅支持應(yīng)用最廣泛的FreeRTOS。

(樂鑫)
STM32L4 Micro-ROS
ARM Cortex-M4的內(nèi)核,128KB的內(nèi)存,1MB的閃存,相當(dāng)?shù)臉銓崯o華。但在機(jī)器人應(yīng)用外設(shè)的集成上很亮眼,溫濕度傳感器、3軸IMU、ToF傳感器等等。在社區(qū)自制的Micro-ROS
板上,ST的32位MCU仍然是最常見的,呈壓倒性優(yōu)勢。
(ST)
Micro-ROS運(yùn)用在MCU上的內(nèi)存限制
在Micro-ROS與硬件結(jié)合上,還有一個問題,即在嵌入式平臺中運(yùn)行Micro-ROS的最大的制約來自于內(nèi)存的限制。由于Micro-ROS 中的內(nèi)存使用是一個很復(fù)雜的問題,所以如何調(diào)整Micro-ROS 中間件的內(nèi)存消耗是比較棘手的。
因為Micro-ROS的目標(biāo)是MCU這一類內(nèi)存資源低的設(shè)備。優(yōu)先使用靜態(tài)內(nèi)存而不是動態(tài)內(nèi)存,并優(yōu)化應(yīng)用程序的內(nèi)存占用是一個較為可行的辦法。上面我們也提到了,Micro-ROS同時可以利用其中間件可插拔性來使用針對MCU進(jìn)行了優(yōu)化的DDS-XRCE。
Micro-ROS的中間件通常被形容成“資源極度受限但極度靈活”,為了與Micro-ROS堆棧中的ROS中間件接口集成,DDS-XRCE引入了靜態(tài)內(nèi)存池,以避免在運(yùn)行時動態(tài)分配內(nèi)存。這些都是為了消除Micro-ROS與硬件結(jié)合時的內(nèi)存限制。解決這一限制后,Micro-ROS與MCU這類硬件的結(jié)合,可以說是相當(dāng)可靠的機(jī)器人控制解決方案。
寫在最后
“將ROS2放在MCU上”,這是Micro-ROS的社區(qū)宣言。純硬件訪問、低延遲的實時性、低功耗是Micro-ROS將ROS2放在MCU上的原因,Micro-ROS也的確開始在機(jī)器人應(yīng)用中彌合資源受限的MCU和更強(qiáng)大的處理器之間的差距。
-
機(jī)器人
+關(guān)注
關(guān)注
210文章
28191瀏覽量
206505 -
ROS
+關(guān)注
關(guān)注
1文章
276瀏覽量
16965 -
機(jī)器人應(yīng)用
+關(guān)注
關(guān)注
0文章
12瀏覽量
2154
發(fā)布評論請先 登錄
相關(guān)推薦
ROS讓機(jī)器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
ZMC900E控制器之ROS2環(huán)境安裝指南

系統(tǒng)鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發(fā)環(huán)境嗎?
ROS2 robot-localization配置方案
移動機(jī)器人與ROS操作系統(tǒng)原理與應(yīng)用
ros怎么設(shè)置環(huán)境變量
【米爾-TIAM62開發(fā)板-接替335x-試用評測】(一)基于TIAM62開發(fā)板的ROS2交叉編譯
在TogetherROS中如何安裝ROS2功能包

利用 NVIDIA Isaac Transport for ROS 提升自定義 ROS 圖形性能
ROS讓機(jī)器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
ROS系統(tǒng)是什么?ROS系統(tǒng)主要特點有哪些?創(chuàng)龍RK3568J+Debian的ROS2系統(tǒng)案例

ROS2中自帶例程測試

ros1和ros2的通信模型

ros的基本概念是什么
如何創(chuàng)建新的ROS工作空間






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論