 電機是如何進行調速的?
電機是如何進行調速的?
當年沒有變頻器的時候,基本上是直流電機調速系統的天下,阿波羅登月時候也要用精確的調速系統,甚至需要進行位置定位控制,當時也是使用了直流伺服來完成的,如果上個世紀60年代以前,晶閘管都沒有誕生的時候,還是通過發電機來帶動直流電機進行調速的,調整發電機勵磁電流就可以控制發電機的輸出電壓,從而控制直流電機的轉速,這種調速系統可以在早期的《電機拖動》教科書上見到,只是笨重點而已,但是調速范圍非常寬,扭矩大,而且穩定可靠,另外直流調速的理論已經非常成熟了,早期的電動汽車上都用這種調速系統。
01
直流電機調速系統
這里說到的直流電機,當然說的是有刷直流電機,因為電機的磁場和電樞線圈是分開獨立控制的,而且正交90°,并沒有耦合問題,當勵磁電流保持恒定的時候,定子勵磁繞組磁鏈是不變的。

電機扭矩=勵磁繞組磁鏈*電樞電流 所以只要調整電樞電流的大小,就可以直接實現對電機精確的轉矩控制,能輕易滿足恒轉矩的控制要求,這也是直流電機調速系統低速扭矩非常良好的根本原因。 對于直流電機的調速,轉速n=(電樞電壓U-電樞電流I*電樞內阻R)/常數Kφ; 因為直流電機的內阻R非常小,所以轉速n≈電樞電壓U/常數。
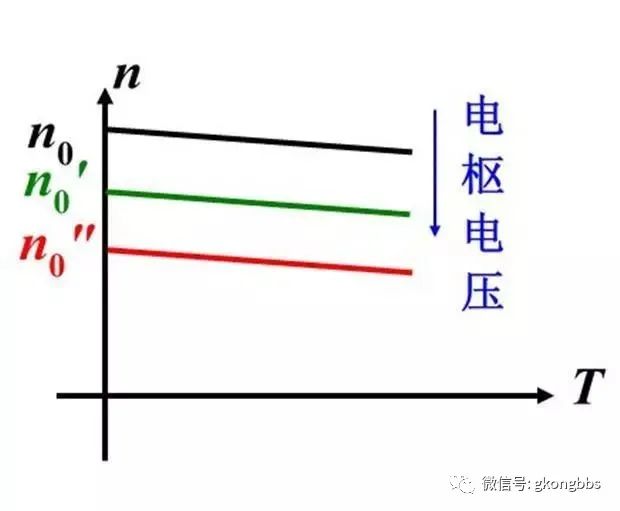
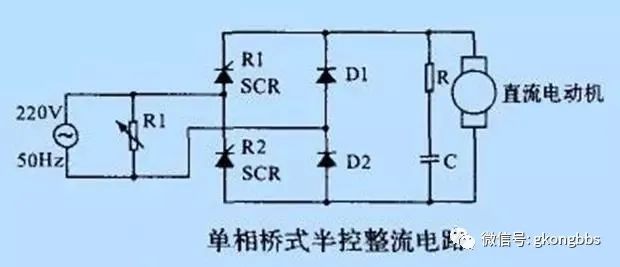
電樞電壓U幾乎和轉速n成正比例關系,這也是直流電機調速通過發電機調壓都能滿足控制重要原因。 后來可控硅等器件發明出來了,通過全控橋或者半控橋,直接可以讓交流電變成可控的直流電,電壓大小可以任意快速可調,這樣用來控制控制直流電機的電樞電壓大小,從而改變電機的轉速。
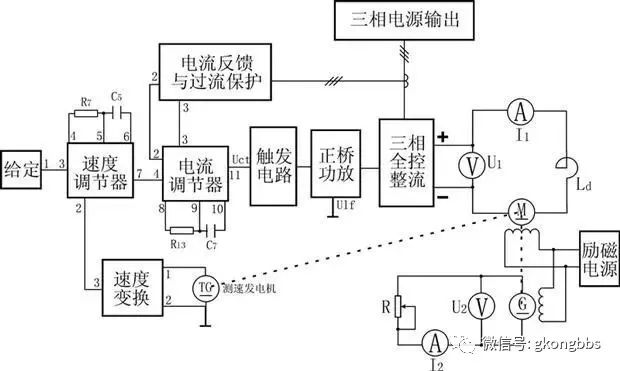
控制理論發展起來后,還對直流電機使用了串級系統來調速,也就是速度環在外邊,速度偏差作為電流環的給定,電流環做為內環,兩個環都使用PID調節器來完成控制,響應快,精度高,扭力大,調速范圍寬。
除了恒扭矩調速外,還可以通過減少勵磁電流來降低勵磁磁通的方法來讓直流電機運行在恒功率區域,這樣扭矩是隨著轉速的增加而減少,功率不變,但是可以擴寬調速范圍。 實際上,今天的變頻器調速的矢量控制模式,就是模仿直流電機的調速方法來進行的,而且效果還沒有直流調速系統的理想。只是因為有刷直流電機碳刷磨損厲害,維護麻煩,而且電機制造成本貴等因素,才逐步讓有刷直流電機調速系統退出了市場。即使這樣,很多小功率的電機依然使用直流調速系統,畢竟價格有優勢,而且性能比較好。
02
變極調速
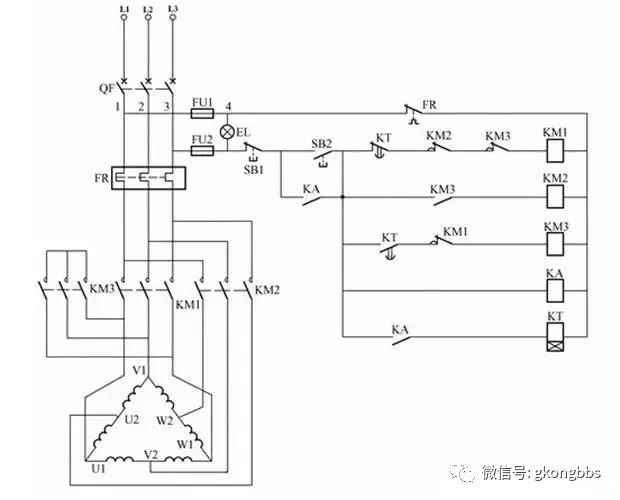
異步電機除了變頻調速外,實際還有一種調試方法,那就是通過改變極對數的方法來實現變速,比如四極電機轉速時1500轉,8極的就只有750轉了,這種調速方式有很大的極限性,一般稱之為雙速電機,往往只有兩個轉速段,但是扭力比較大,而且比較穩定,在一些只需要兩段速的場合,使用這種調速方式是非常理想的,比如一些混料系統上,就有這樣的調速系統,低速運行一段時間后,再切換到高速模式,這種控制系統非常簡單,有點類似星三角那種切換,所以成本低廉,一直到今天,即使變頻非常普及了,但是還是很多場合使用這種調速方式。
異步電機轉速n=60f/p,除了改變頻率就可以改變轉速n外,調整極對數p也可以讓轉速得到改變。
03
滑差調速
這種調速,顧名思義,就是“打滑”來調速的意思,實際電機轉速啟動以后是不變的,是通過電機和負載之間的“滑差頭”來打滑,讓負載這邊的速度變低而已,這個滑差頭,也可以理解成電磁離合器,這種離合器可以有多種形式,但都是利用了電磁效應形成阻力,下邊簡單以磁粉離合器的原理來說明一下。
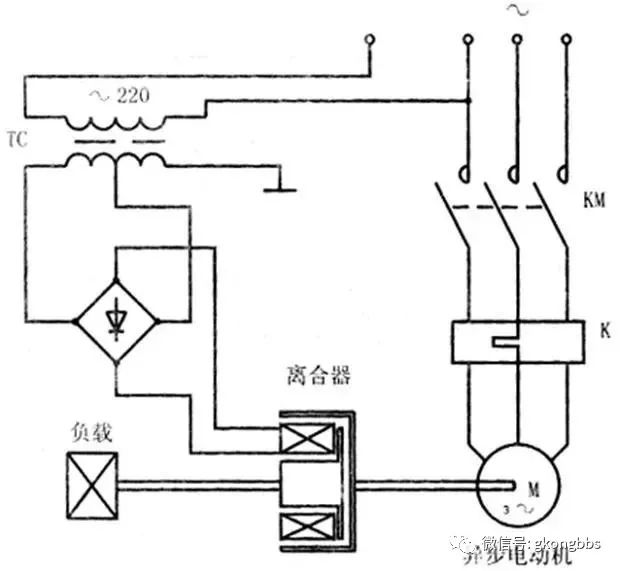
比如在這個離合器里邊,裝有線圈還有很多磁粉,磁粉在通電情況下,會因為線圈磁場的作用,黏連在一起,電流越大,磁場越強,磁粉之間結合越緊密,達到一定程度,就可以變成一定剛性的東西,直接讓輸出和輸出軸連接到一起,保持一致的速度輸出,這樣可以讓負載和電機轉速一樣快。 當完全沒有電流了,磁場消失,磁粉會變成一盤散沙,輸出和輸入軸之間完全沒有磁粉連接了,雖然電機還在轉,負載轉速可以變成零了。 如果磁場電流處于一定值,磁粉有一定的黏連,但是剛度不夠,就會在里邊打滑,這樣會讓輸入和輸出軸之間形成一定的速度差,控制磁場電流值大小,就可以控制速度差大小,這樣能讓負載的速度得到改變。 因為是打滑的,所以肯定會摩擦發熱,這樣一部分電能會白白浪費,調速的效率低下。當然也有它的優點,它可以做成速度閉環控制,低速時候扭矩比變頻器調速還要理想。
審核編輯 :李倩
-
直流電機
+關注
關注
36文章
1708瀏覽量
70072 -
調速系統
+關注
關注
0文章
97瀏覽量
23793 -
勵磁電流
+關注
關注
1文章
88瀏覽量
8515
原文標題:變頻器沒有被發明前,電機是如何進行調速的?
文章出處:【微信號:robotqy,微信公眾號:機械自動化前沿】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論