 詳解毫米波雷達與激光雷達的區別
詳解毫米波雷達與激光雷達的區別
車載角雷達可以實現盲點檢測(BSD)、側向來車警示 (CTA)、車道變換輔助 (LCA)等功能,在輔助駕駛場景中具有重要應用。下面以 TI 公司的 AWR1843 雷達為例介紹車載角雷達的工作原理。
調頻連續波(FMCW)雷達可以準確測量障礙物和其他車輛的距離和相對速度,是汽車安全應用的重要傳感器。雷達相對于攝像頭和基于激光雷達的系統的一個重要優勢是雷達相對不易受環境條件的影響(例如雨水、灰塵、煙霧和眩光的影響)。
FMCW 雷達傳輸 Chirp(線性調頻)信號并處理其反射,因而可以在完全黑暗或明亮的日光下工作。與超聲波相比,雷達通常具有更長的射程,并且雷達信號的傳輸時間遠小于超聲波信號的傳輸時間。因此,雷達可以更準確地報告動態場景。
毫米波雷達與激光雷達區別
從工作原理上來講,激光雷達(LIDAR,light detection and ranging)和毫米波雷達(RADAR,radio detection and ranging)基本類似,都是利用回波成像來顯示被探測物體。
不過激光雷達發射的電磁波是一條直線,主要以光粒子發射為主要方法,而毫米波雷達發射出去的電磁波是一個錐狀的波束,以電磁輻射為主。
角雷達的工作原理
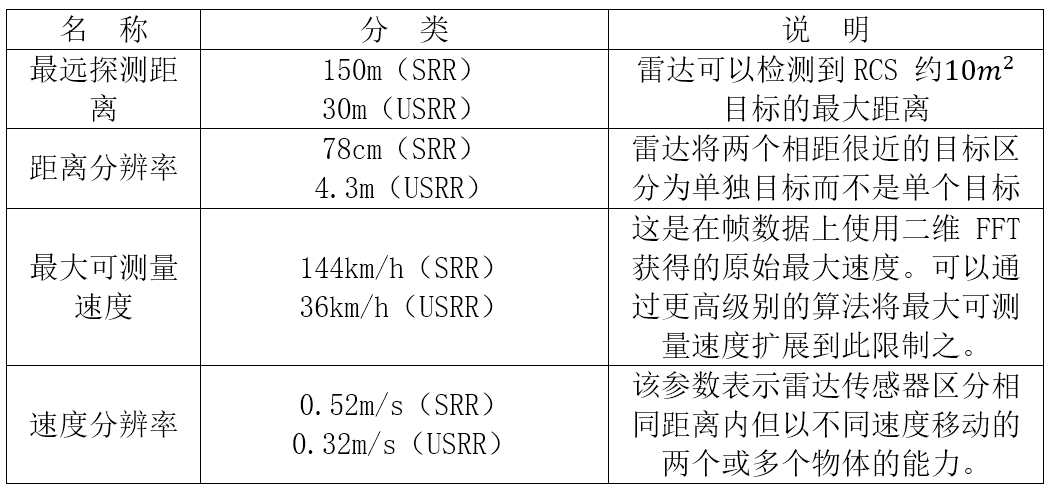
角雷達設計應用于超短程雷達(USRR)和短程雷達(SRR)。在 140km/h 的行駛條件下,AWR1843 雷達能夠檢測兩百多個個物體,并在 150 米的距離處跟蹤二十多個物體。
在角雷達應用中,AWR1843 被配置為多模雷達,意味著它在跟蹤 150 m 處的物體的同時,還可以在 30 m 處生成豐富的物體點云。通過設計增益比更高的天線,可以實現超過 150 m 的范圍。
由于該設計是多模雷達,因此有兩組不同的規格。第一個是可用于BSD、LCA和TJA,對應實現最大射程 150m 的配置(SRR)。第二個是對應于 30m 配置的 USRR 規范。
AWR1843 雷達簡介
AWR1843 是一款集成的單芯片調頻連續波(FMCW)傳感器,能夠在 76-81GHz 頻段內工作。該器件采用 45nm CMOS 工藝構建,可在極小的外形尺寸內實現模擬和數字集成。
該傳感器有四個接收器和三個帶有閉環鎖相環(PLL)的發射器。其還包括一個用于射頻校準和安全監控的內置無線電處理器(BIST)。傳感器設備支持 10MHz 的中頻帶寬和可重新配置的輸出采樣率。Arm Cortex R4F 和 TI 的 C674x DSP(定點和浮點)以及 2MB 片上 RAM 支持高級算法開發。
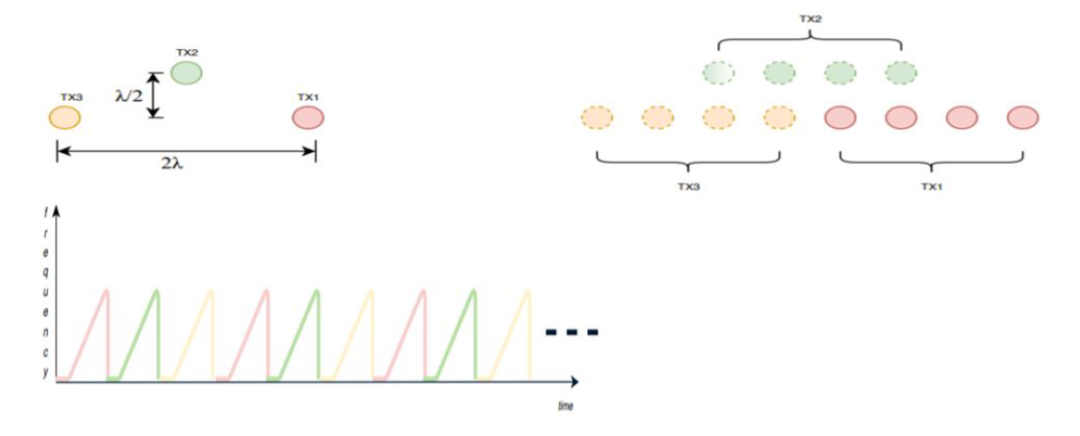
天線配置
角雷達使用四個接收器和三個發射器(兩種不同Chirp配置)。第一種配置(SRR)使用簡單的非 MIMO 配置,TX1、TX2 和 TX3同時傳輸。
第二種 USRR 使用時分復用MIMO配置(即轉換 TX1、TX2 和 TX3 中交替發射 Chirp 信號)。該多輸入多輸出(MIMO)配置合成了一個由 12 個虛擬 RX 天線組成的陣,將角度分辨率提高了三倍(與單個 TX 配置相比)。
信號配置和系統性能
在對信號配置之前,我們先看看毫米波雷達的信號波形圖。
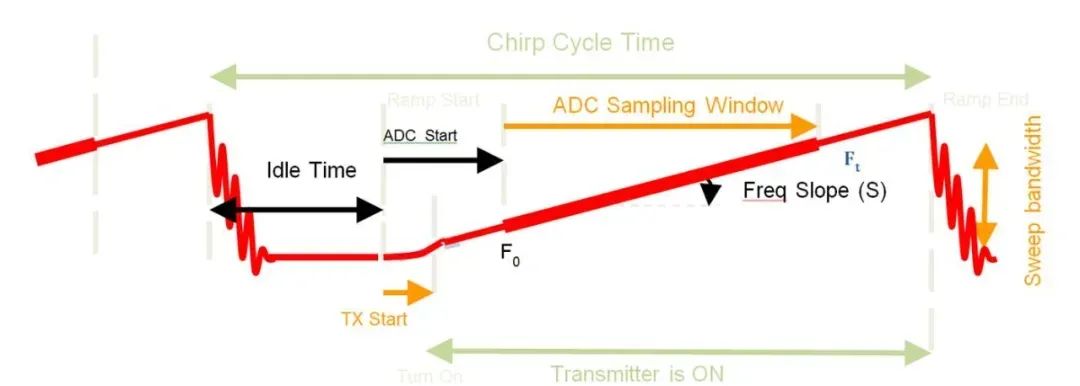
圖中,
Idle Time:空閑時間,上一次 chirp 結束和下一次 chirp 開始之間的時間
Tx Start Time:發射開啟時間,從斜坡開始到發射器打開的時間
ADC Start Time:ADC 啟動時間,從斜坡開始到 ADC 開始對數據進行采集時間
Ramp End Time:斜坡結束時間,從斜坡開始到 chirp 持續上升結束的時間
AWR1843 雷達最大探測距離大約 150m,最大探測距離 。頻率斜率 和最大距離 的乘積受限于可用的中頻帶寬 (AWR1843 為 10MHz)。因此,150m 的最大距離將 FMCW 信號的頻率斜率鎖定到大約 。
Chirp 信號周期的選擇是距離分辨率 和最大速度 之間的權衡。該雷達使用約 0.78m 的距離分辨率,其原始最大速度約為 55km/h。通過高級算法,可以檢測到的最大速度為 144km/h。
由于 L3 內存和 IF 帶寬的限制,較遠的距離會有較低的距離分辨率。解決這種權衡的一種有用技術是擁有多種配置,每種配置都針對特定的觀看范圍進行定制。例如,典型的 SRR 雷達在兩種模式之間交替:低分辨率模式瞄準更大的最大距離(例如 150 米,分辨率為 0.75 米)和高分辨率模式瞄準更短的距離(例如 30 米,分辨率為 4 厘米)。
為了滿足 USRR 和 SRR 的要求,角雷達設計利用了 AWR1843 器件的高級幀配置 API。此 API 允許構建由多個子幀組成的幀,每個子幀都被調整到特定的應用程序。
這些子幀中的每一個都被調整到一個應用程序。在 SRR 設計的情況下,使用了兩個子幀。一個子幀專用于 USRR 中,另一個子幀專用于 SRR 中。
幀配置使用高級幀配置 API 生成兩個單獨的子幀-SRR 子幀以及 USRR 子幀。如下圖所示。
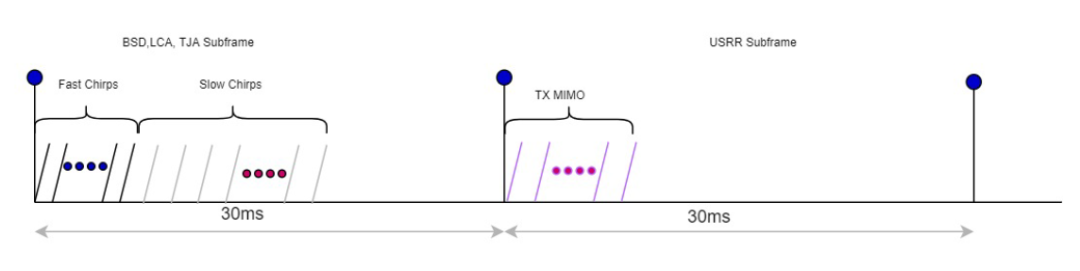
SRR 子幀由兩種 Chirp 信號組成:快頻信號和慢頻信號。快頻信號和慢頻信號具有相同的斜率,但是,慢頻信號的重復周期略高于快頻信號。
與快頻信號相比,在 2D-FFT 之后處理的慢頻信號將具有較小的最大速度。快、慢頻信號不交替。相反,快頻信號重復一定次數,然后是慢頻信號再次重復相同次數。
這種設計的目的是使用來自快頻信號和慢頻信號的兩個獨立的目標速度估計來生成具有更高最大速度估計。
USRR 子幀由三個交替的 Chirp 信號組成。每個 Chirp 使用 AWR1843 上可用的三個 TX 之一。該子幀的組合處理允許生成 8 個 Rx 天線的虛擬 Rx 陣列,因此具有更好的角分辨率(在方位角方向約為14.32度)。
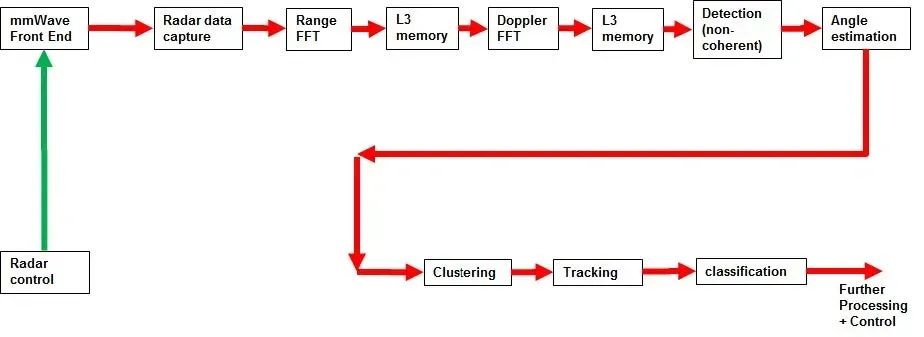
下圖顯示了到SRR應用程序的處理數據路徑。
時間配置
下圖顯示了 Chirp 信號的時序和系統中的后續處理。
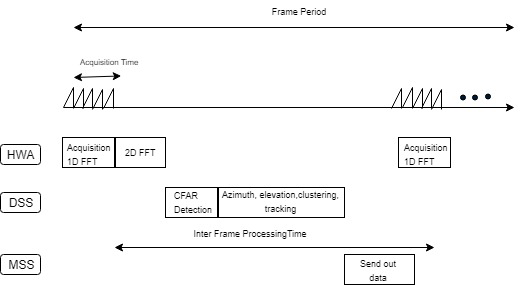
上圖顯示的數據路徑處理,描述如下。
RF 前端由 BIST 子系統(BSS)配置,從各個前端通道獲得的原始數據交由雷達硬件加速器(HWA)進行處理。
Chirp 期間的處理包括:
從 ADC 緩沖器獲取來自多個接收天線的輸入(對應于發射天線上的Chirp模式),硬件加速器執行的一維(距離)FFT 處理
通過增強型直接存儲器訪問(EDMA)將處理結果輸到L3(三級緩存)RAM
在射頻電路的空閑期間(即幀間處理時間)進行處理包括:
將 L3 RAM 中的一維輸出作為輸入,由硬件加速器執行的二維(速度)FFT 處理,在 L3 RAM 中生成(距離、速度)矩陣
將數據從 L3 RAM 輸入 C674x DSP 以執行多普勒方向的CFAR檢測,距離方向的 CFAR 檢測使用 mmWave 庫。其余的處理在 DSP 中繼續進行
SRR子幀、多普勒和 USRR 子幀的峰值聚合(多普勒和距離)
到達方向(方位角)、俯仰角估計
基于目標的 SNR 和 2D-FFT 幅度進行額外修剪以避免地面雜波
在 SRR 和 USRR 中使用 DBSCAN 算法(基于密度的聚類算法)對檢測到的目標進行聚類
使用 SRR 的擴展卡爾曼濾波器跟蹤集群
EDMA配置
存儲器之間的大規模數據移動是在 SRR 中使用 EDMA 完成的。使用 EDMA 比使用處理器移動數據更有效,因為當數據移動完成時,DSP 和 HWA 可以繼續處理數據。必要的主要數據傳輸包括:
? 將距離 FFT 輸出數據從 HWA 內存移動到 L3 內存
? 從 L3 獲取 1D-FFT 數據到 HWA 輸入緩沖區以執行 2D FFT
? 移動來自 L3 的 1D-FFT 數據進行角度估計(在2D-DFT之后)
ping-pong 工作機制
ping-pong 是一種數據傳輸技術,能夠同時利用兩個數據緩沖區達到數據連續傳輸的目的,從而提高數據傳輸速率。
由于單個緩沖區得到的數據在傳輸和處理中很容易被覆蓋,而 ping-pong 緩沖區的方式能夠總是保持一個緩沖區的數據被利用,另一個緩沖用于存儲數據。即兩個相同的對象作為緩沖區交替地被讀和被寫。
大多數 EDMA 都在 ping-pong 緩沖區上工作,這意味著當 ping 緩沖區被填充時,HWA 或 DSP 可以使用 pong 緩沖區進行處理。
內存分配
AWR1843具有以下存儲器:
? L3 RAM 1024 kB
? L2 RAM 256 kB
? L1D RAM 32 kB
? L1P RAM 32 kB
R4F有512kB代碼和數據RAM。在 SRR設計中,R4F僅用于配置和 UART/LVDS 通信。它的內存消耗和分配對設計沒有影響。因此,DSP 是內存的主要消費者。
在 L1P RAM 和 L1D RAM可用的32KB中,L1P RAM 的一半(16 kB)和L1D RAM的一半(16 kB)保留用于代碼和數據存儲。剩余的用作緩存。
存儲在 L1P 中的代碼通常是 FFT 或 CFAR 等算法,或者是更復雜算法(如聚類和跟蹤)的一些內核。將這些存儲在 L1 中可以更快地執行這些內核,并在剩余內存中節省一些空間(在這種情況下,約為16kB)。
L1D 用作某些常用緩沖區的快速 RAM。L2 RAM 主要用于代碼存儲、數據暫存等。L3 RAM 主要用存儲雷達立方體等。
處理雷達信號需要在處理階段(3D-FFT、檢測、角度估計等)的每個步驟中使用大量暫存緩沖區。通過覆蓋暫存緩沖區可以有效地使用可用內存。在前一階段使用的暫存緩沖區可以在當前階段重新使用。
原文標題:車載毫米波角雷達簡介
文章出處:【微信公眾號:云腦智庫】歡迎添加關注!文章轉載請注明出處。
-
工作原理
+關注
關注
4文章
274瀏覽量
37660 -
激光雷達
+關注
關注
967文章
3940瀏覽量
189602 -
毫米波雷達
+關注
關注
106文章
1030瀏覽量
64240
原文標題:車載毫米波角雷達簡介
文章出處:【微信號:CloudBrain-TT,微信公眾號:云腦智庫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

毫米波雷達與超聲波雷達的區別是什么
簡述毫米波雷達的結構、原理和特點
激光雷達與毫米波雷達的優缺點是什么
激光雷達VS毫米波雷達,一文讀懂!

除了“上車”,毫米波雷達還可以有很多選擇






 工商網監
工商網監
評論