") 致遠(yuǎn)電子ZPS-CANFD支持總線數(shù)據(jù)的發(fā)送和接收
致遠(yuǎn)電子ZPS-CANFD支持總線數(shù)據(jù)的發(fā)送和接收
采樣點(diǎn)是接收節(jié)點(diǎn)判斷信號邏輯的位置,采樣點(diǎn)對CAN總線來說極其重要,尤其是在組網(wǎng)的時候,多個節(jié)點(diǎn)盡量保持同一個采樣點(diǎn),若網(wǎng)絡(luò)中節(jié)點(diǎn)采樣點(diǎn)不一致會導(dǎo)致同樣的采樣頻率出現(xiàn)采樣錯誤,使整個網(wǎng)絡(luò)出現(xiàn)故障。
采樣點(diǎn)的規(guī)則及原理
CAN協(xié)議里將一個位時間分為同步段、傳播段、相位緩沖段1和相位緩沖段2。這些段又由稱之為Time Quantum(以下稱為Tq)的最小時間單位構(gòu)成。1位由多少個Tq構(gòu)成、每個段由多少個Tq構(gòu)成等是可以設(shè)定的。通過設(shè)置bit時序,使得可以設(shè)定一個采樣點(diǎn)以使總線上多個單元可同時采樣,所謂采樣點(diǎn)就是在這一時刻總線上的電平被鎖存,這個鎖存的電平作為位的值。采樣點(diǎn)的位置在相位緩沖段1(PBS1)的結(jié)束處。
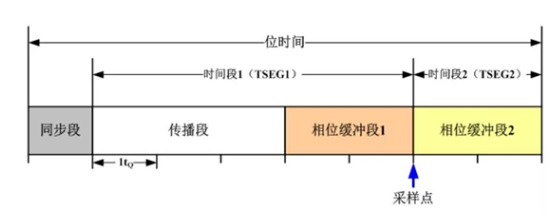
圖1 CAN 位時間結(jié)構(gòu)圖
同步段(SS):多個連接在總線上的單元通過此段實(shí)現(xiàn)時序調(diào)整,同步進(jìn)行接收和發(fā)送工作,邊沿包含在此段中;
傳播時間段(PTS):用于補(bǔ)償網(wǎng)絡(luò)上所有的物理延遲;
相位緩沖段1(PBS1)和相位緩沖段2(PBS2):當(dāng)信號邊沿不能被包含于(SS)段中時,可在此段進(jìn)行補(bǔ)償;
采樣點(diǎn):讀取并解釋總線上各位值的一個時間點(diǎn)。
采樣點(diǎn)位置如圖1所示,它是讀取總線電平,并將讀到的電平作為位值的點(diǎn),所以從一個位的開始到采樣點(diǎn)的時間占一個完整位的總時間的百分比就是所求的采樣點(diǎn)的值:
sample =(1+TSEG1)/(1+TSEG1+TSEG2)
ZPS-CANFD采樣點(diǎn)測試的測試原理
將ZPS-CANFD設(shè)備連接好后,再選擇“采樣點(diǎn)測試”并設(shè)置好對應(yīng)的參數(shù),然后開始測試即可進(jìn)行采樣點(diǎn)的測試,如圖2,最終的測試結(jié)果為:90%,誤差為5%位寬。
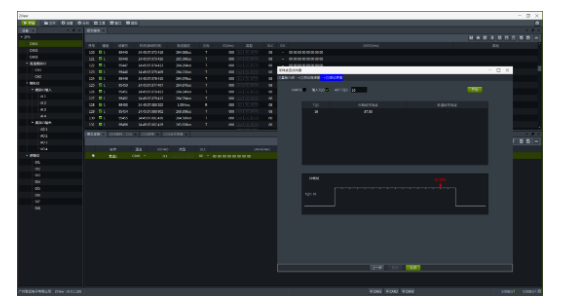
圖2 采樣點(diǎn)測試結(jié)果
ZPS-CANFD測試原理及過程如下:
1、用ZPS-CANFD發(fā)送ID 為0的報文100幀,在此報文的第一個ID位(1注1)的0%處施加一個寬度為27%位寬(2注2)的干擾(如圖3),記錄這100幀報文中出現(xiàn)的錯誤幀數(shù),但由于此時距離采樣點(diǎn)位置較遠(yuǎn),暫時不會出現(xiàn)錯誤幀。
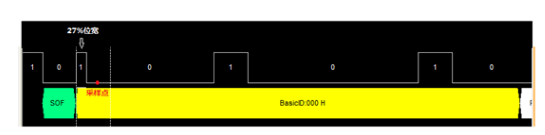
圖3 干擾1
2、27%位寬的干擾逐漸以1%位寬的步進(jìn)向右移動,在干擾的右邊沿快靠近采樣點(diǎn)時(如圖4),由于通信延遲的關(guān)系,此時采到的電平和ZPS-CANFD發(fā)送的不一致了,導(dǎo)致DUT接收到的CRC校驗(yàn)和DUT計算的CRC校驗(yàn)不一致,DUT就會主動發(fā)出錯誤幀,把每一個不同干擾位置的錯誤幀數(shù)記錄下來。從此刻開始,繼續(xù)往右步進(jìn),錯誤幀數(shù)也會有所增加。
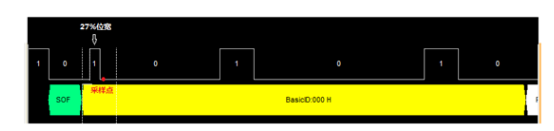
圖4 干擾2
3、繼續(xù)步進(jìn),當(dāng)干擾的左邊沿位置過了采樣點(diǎn)后(如圖5),此時DUT就不會再出現(xiàn)錯誤幀了。因此,最后一個出現(xiàn)錯誤幀的位置就是我們想要知道的采樣點(diǎn)位置。
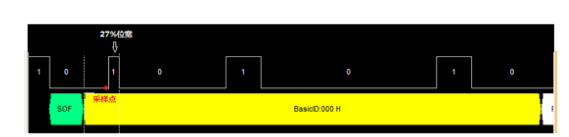
圖5 干擾3
常規(guī)采樣點(diǎn)的設(shè)計
采樣點(diǎn)對CAN總線來說非常重要,在組網(wǎng)的時候,多個節(jié)點(diǎn)應(yīng)盡量保持同一個采樣點(diǎn),且最好在但不超過7/8位時間點(diǎn)上,標(biāo)準(zhǔn)中也給了如下幾個例子。
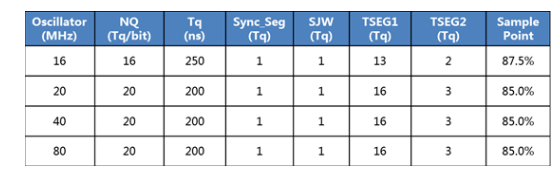
關(guān)于采樣點(diǎn)的計算:
sample =(1+TSEG1)/(1+TSEG1+TSEG2)
例如上面的計算舉例:晶振時鐘頻率16M,SJW為1個Tq, TSEG1為13, TSEG2為2,則采樣點(diǎn)計算帶入上面的公式,sample =(1+13)/(1+13+2)=87.5%。
半導(dǎo)體行業(yè)采樣點(diǎn)測試現(xiàn)狀半導(dǎo)體行業(yè)下游市場涉及汽車、工業(yè)、消費(fèi)電子等各個領(lǐng)域,僅控制器市場在2020年就已達(dá)175億美元,2021年重返正增長,2020-2025年CAGR為8%。以汽車電子為例,當(dāng)前汽車領(lǐng)域隨著新能源汽車的蓬勃發(fā)展,對于該分類汽車的開發(fā)也愈加成熟。其系統(tǒng)可以分為幾大板塊,即動力總成、車身控制、輔助駕駛系統(tǒng)等,而每個系統(tǒng)下又有多個子單元進(jìn)行單獨(dú)控制,例如發(fā)動機(jī)、座椅調(diào)節(jié)、空調(diào)、影音裝置等。因此從數(shù)量上來說,一輛車所需要的ECU和MCU的數(shù)量也在隨之增加。到目前為止,各系統(tǒng)下的節(jié)點(diǎn)數(shù)量一般都會達(dá)到20-50個。
ECU的增加使得汽車線束排線困難、軟件維護(hù)與升級困難、模塊間信息溝通效率低,因此就需要使用CANFD技術(shù)來增加通訊的速率和效率,而此時隨著帶寬的增加,各節(jié)點(diǎn)的采樣點(diǎn)測試就成為了保證通訊的核心點(diǎn)。
總結(jié)
ZPS-CANFD是致遠(yuǎn)電子總線分析儀第二代CAN總線開發(fā)輔助工具,是適用于CANFD、CAN、LIN總線的測量及測試儀器,支持總線數(shù)據(jù)的發(fā)送和接收,高層協(xié)議解析及診斷,能對CANFD、CAN總線物理層電氣信號實(shí)時采集和記錄,并附帶有高速模擬通道、通用數(shù)字IO及模擬IO,通過提供的硬件接口及軟件功能,用戶能夠便捷地構(gòu)建總線信號測量與分析、節(jié)點(diǎn)功能仿真及測試、網(wǎng)絡(luò)可靠性診斷及評估的自動化系統(tǒng)。
-
軟件
+關(guān)注
關(guān)注
69文章
4783瀏覽量
87167 -
總線數(shù)據(jù)
+關(guān)注
關(guān)注
0文章
9瀏覽量
6551 -
致遠(yuǎn)電子
+關(guān)注
關(guān)注
13文章
405瀏覽量
31277
發(fā)布評論請先 登錄
相關(guān)推薦
MD9360四路CANFD應(yīng)用實(shí)例

STM32G474發(fā)送CANFD數(shù)據(jù)出現(xiàn)異常的原因?
CYT2B75 SK Rev03無法正常發(fā)送CANFD數(shù)據(jù),為什么?
喜訊 | 行穩(wěn)致遠(yuǎn),進(jìn)而有為!ZLG致遠(yuǎn)電子榮獲“中國汽車軟件領(lǐng)軍企業(yè)”





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論