 NVIDIA SDK 3.0新硬件功能介紹
NVIDIA SDK 3.0新硬件功能介紹
NVIDIA 圖靈架構引入了一種新的硬件功能,用于以非常高的性能計算一對圖像之間的光流。 NVIDIA 光流 SDK 公開了使用這種光流硬件(也稱為 NVOFA )加速應用程序的 API 。我們很高興地宣布光流 SDK 3.0 的可用性具有以下新功能:
DirectX 12 光流 API
通過單個 API 的前后向光流
全球流動矢量
DirectX 12 光流 API
DirectX 12 是一個來自 Microsoft 的低級編程 API ,與它的前身 DirectX 11 相比,它減少了驅動程序開銷。 DirectX 12 為開發人員提供了更大的靈活性和細粒度的控制。開發人員現在可以利用 DirectX 12 中的低級編程 API 并優化其應用程序,以提供比早期 DirectX 版本更好的性能—同時,客戶端應用程序本身必須負責資源管理、同步, DirectX 12 在游戲和其他圖形應用程序中迅速發展。
光流 SDK 3.0 支持 DirectX 12 應用程序使用 NVIDIA 光流引擎。計算出的光流可用于提高游戲和視頻中的幀速率,以獲得更平滑的體驗或用于目標跟蹤。為了提高幀速率, F rame R ate U p C onversion ( FRUC )技術通過在原始幀之間插入插值幀來使用。插值算法使用幀對之間的流來生成中間幀。
光流硬件的所有代支持 DirectX 12 光流接口。光流 SDK 包包含頭( S )、演示使用的示例應用程序、可根據需要重新使用或修改的 C ++包裝類和文檔。用于訪問光流硬件的所有其他組件都包含在 NVIDIA 顯示驅動程序中。 Windows 20H1 或更高版本的操作系統支持 DirectX 12 光流 API 。
除了顯式同步之外, directx12 光流 API 的設計與 SDK 中已有的其他接口( CUDA 和 DirectX 11 )非常接近, DirectX 12 光流 API 由初始化、流量估計和銷毀三個核心功能組成。
ypedef NV_OF_STATUS(NVOFAPI* PFNNVOFINIT) (NvOFHandle hOf, const NV_OF_INIT_PARAMS* initParams); typedef NV_OF_STATUS(NVOFAPI* PFNNVOFEXECUTED3D12) (NvOFHandle hOf, const NV_OF_EXECUTE_INPUT_PARAMS_D3D12* executeInParams, NV_OF_EXECUTE_OUTPUT_PARAMS_D3D12* executeOutParams); typedef NV_OF_STATUS(NVOFAPI* PFNNVOFDESTROY) (NvOFHandle hOf);
初始化和銷毀 API 在所有接口上都是相同的,但在 DirectX 12 和其他接口(即 DirectX 11 和 CUDA )之間執行 API 是不同的。盡管在 DirectX 12 中傳遞給 executeapi 的大多數參數與其他兩個接口中的參數相同,但在功能上還是存在一些差異。 DirectX 11 和 CUDA 接口中的同步由操作系統運行時和驅動程序自動處理。但是,在 DirectX 12 中,需要有關圍欄和圍欄值的附加信息作為執行 API 的輸入參數。這些圍欄對象將用于同步 CPU ? GPU 和 GPU ? GPU 操作。有關詳細信息,請參閱光流 SDK 附帶的編程指南。
DirectX 12 中的緩沖區管理 API 接口也需要 fence 對象來進行同步。
所有接口的光流輸出質量相同。與其他兩個接口相比, DirectX 12 的性能應該非常接近。
正反向光流
沒有一種光流算法能給出 100% 的準確流量。在閉塞區域,流動通常是扭曲的。有時, NVOA 提供的成本也可能不代表流動的真實可信度。通常采用的一個簡單檢查是比較向前和向后流動。如果正向流和反向流之間的歐氏距離超過閾值,則該流可以標記為無效。
為了估計兩個方向上的流,客戶機必須調用 Execute API 兩次:一次調用輸入和引用圖像,第二次調用在反轉輸入和引用圖像之后。像這樣兩次調用 Optical Flow Execute API 可能會由于上下文切換、線程切換等開銷而導致性能不佳。 Optical Flow sdk3 。 0 公開了一個新的 API ,以便在單個 Execute 調用中生成雙向流。可以通過在初始化中設置 NV_OF_INIT_PARAMS::predDirection to NV_OF_PRED_DIRECTION_BOTH 并在 NV_OF_EXECUTE_OUTPUT_PARAMS/NV_OF_EXECUTE_OUTPUT_PARAMS_D3D12::bwdOutputBuffer, NV_OF_EXECUTE_OUTPUT_PARAMS/NV_OF_EXECUTE_OUTPUT_PARAMS_D3D12::bwdOutputCostBuffer 。 中提供接收反向流和/或開銷所需的緩沖區來啟用此功能
一旦在兩個方向上生成流,客戶端應用程序就可以比較兩個方向的流向量,根據適當的標準(例如,向前和向后流向量之間的歐幾里德距離)丟棄不準確的流向量,并使用孔填充算法來填充這些丟棄的流向量。
注意,由于一些優化, FB 流的輸出質量可能不同于單向流。
演示 FB flow API 編程和一致性檢查的示例代碼:
// Initialization of API
NV_OF_INIT_PARAMS initParams = { 0 };
...
initParams.predDirection = NV_OF_PRED_DIRECTION_BOTH;
...
NvOFAPI->nvOFInit(hNvOF, &initParams);
// Estimation of forward and backward flow
NV_OF_EXECUTE_INPUT_PARAMS executeInParams = { 0 };
...
NV_OF_EXECUTE_OUTPUT_PARAMS executeOutParams = { 0 };
...
executeOutParams.outputBuffer = forwardFlowBuffer;
executeOutParams.outputCostBuffer = forwardFlowCostBuffer;
executeOutParams.bwdOutputBuffer = backwardFlowBuffer;
executeOutParams.bwdOutputCostBuffer = backwardFlowCostBuffer;
NvOFAPI->nvOFExecute(hNvOF, &executeInparams, &executeOutParams)
// Invalidating flow vectors
for (int y = 0; y < height; y++) {
for (int x = 0; x < width; x++) {
// read forward flow vector
float mvx = GetFlowX(forwardFlowBuffer, x, y);
float mvy = GetFlowY(forwardFlowBuffer, x, y);
// derive the corresponding position in the backward flow (assuming 1x1 grid size)
// and read the backward flow vector
int x2 = x + mvx;
int y2 = y + mvy;
if (x2 < 0 || x2 > width - 1 || y2 < 0 || y2 < height - 1)
{
SetFlowInvalid(forwardFlowBuffer, x, y);
continue;
}
float mvx2 = -1 * GetFlowX(backwardFlowBuffer, x2, y2);
float mvy2 = -1 * GetFlowY(backwardFlowBuffer, x2, y2);
// mark flow vector as invalid if the distance is greater than a threshold
if (((mvx - mvx2) * (mvx - mvx2) + (mvy - mvy2) * (mvy - mvy2)) > thresh) {
SetFlowInvalid(forwardFlowBuffer, x, y);
}
}
}
全球流量估算
視頻序列或游戲中的全局流是由攝影機平移運動引起的。全局流估計是一個重要的工具,廣泛應用于圖像分割、視頻拼接或基于運動的視頻分析應用中。
全局流矢量也可以啟發式地用于計算背景運動。一旦估計出背景運動,它就可以用來填充遮擋區域中的流矢量,也可以用來處理插值幀中扭曲像素的碰撞。
全局流量是基于發生頻率和其他一些啟發式算法,在前向流矢量上計算的。
為了能夠生成全局流,初始化 API 需要設置標志 初始化參數的 NV \ u :: enableGlobalFlow ,并在 executeapi 中提供額外的緩沖區 NV _ OF _ EXECUTE _ OUTPUT _ PARAMS / NV _ OF _ EXECUTE _ OUTPUT _ PARAMS _ D3D12 ::全局流緩沖區 。
關于作者
Konda Raju 是 NVIDIA 多媒體驅動團隊的高級系統軟件工程師。他從事 NVIDIA 光流驅動器和應用程序編程接口設計。此前,他致力于 NVIDIA 視頻驅動程序和固件設計。他有技術碩士學位。印度理工學院坎普爾分校信息技術專業學位。
Sampurnananda Mishra 是 NVIDIA 負責多媒體驅動程序的高級經理。他研究過 NVIDIA GPU s 上支持的各種多媒體用例。他的興趣包括視頻編碼、計算機視覺、視頻安全、深度學習和系統軟件。他擁有印度 IIT 坎普爾電子工程碩士學位,主攻數字信號處理。
審核編輯:郭婷
-
接口
+關注
關注
33文章
8499瀏覽量
150837 -
NVIDIA
+關注
關注
14文章
4940瀏覽量
102817 -
SDK
+關注
關注
3文章
1026瀏覽量
45779
發布評論請先 登錄
相關推薦
通過Google Play SDK管理中心打造更安全、更優質的SDK


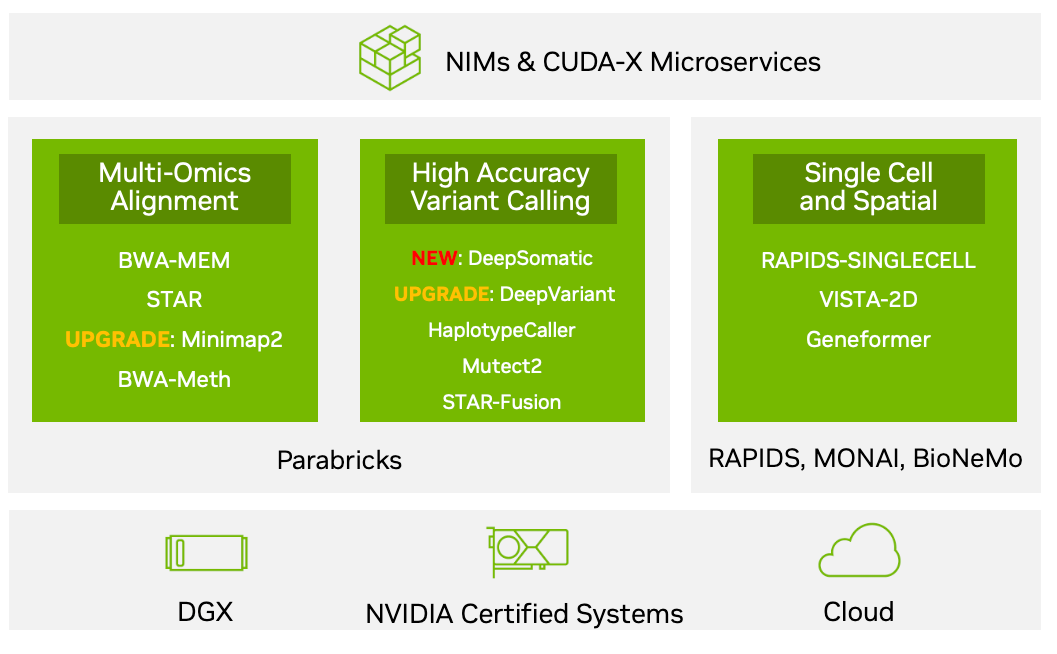
NVIDIA Parabricks v4.3.1版本的新功能
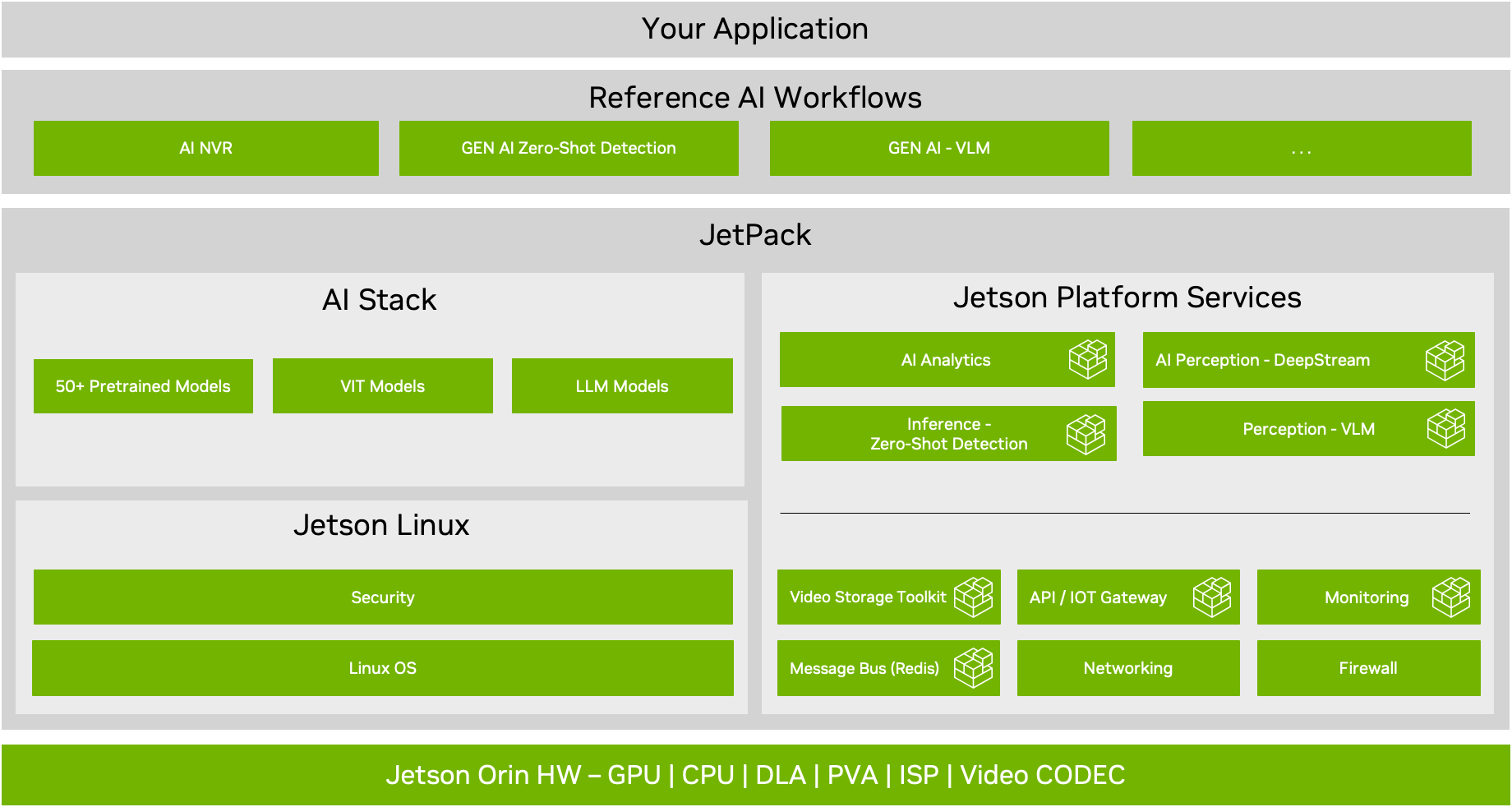
NVIDIA JetPack 6.0版本的關鍵功能
NVIDIA RTX AI套件簡化AI驅動的應用開發
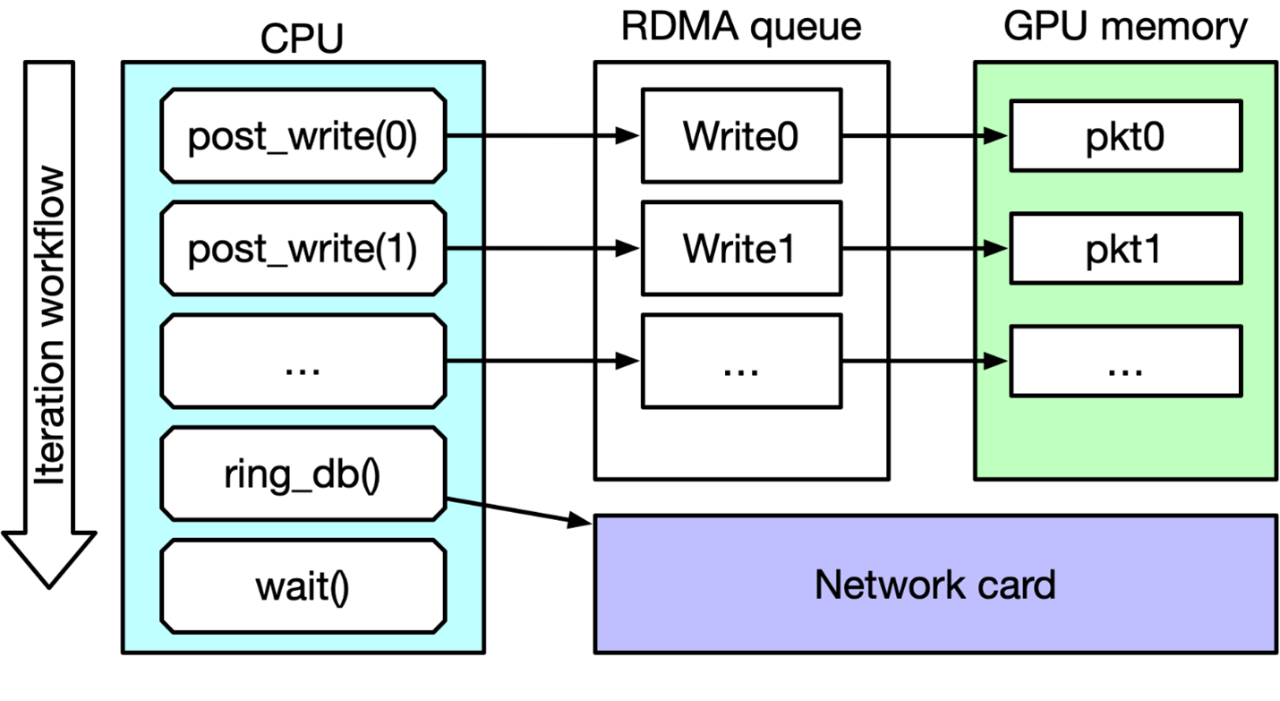
IB Verbs和NVIDIA DOCA GPUNetIO性能測試
如何將SDK安裝到IDE并使用所有SDK功能?
MediaTek NeuroPilot SDK整合NVIDIATAO
NVIDIA發布DeepStream 7.0,助力下一代視覺AI開發

讓sdk中的usb-uvc演示在CYUSB3014上運行,USB3.0沒有響應的原因?
利用NVIDIA AI Enterprise IGX在邊緣賦能任務關鍵型AI

NVIDIA Omniverse中的物理模擬功能







 工商網監
工商網監
評論