 一種可在二維平面內進行全自由度獨立控制的光驅動微米器件
一種可在二維平面內進行全自由度獨立控制的光驅動微米器件
當光與物質發生相互作用時,伴隨著光子的散射或者吸收常常會發生光子動量或角動量的轉移,從而產生施加在物體上的力或力矩。這些力和力矩作用在微觀物體上可以產生很大的加速度,因此可以用光來對微觀物體進行非接觸操控。以光鑷技術為代表的光操控在一些領域獲得成功的應用,特別是對于電磁中性的物體,例如電介質微粒、生物細胞以及原子分子等。Arthur Ashkin 教授因此獲得2018年諾貝爾物理學獎。但是迄今為止,利用光來實現對微觀物體的全自由度操控(二維空間:2個平動自由度+1個轉動自由度;三維空間:3個平動自由度+3個轉動自由度)仍然是一個很大的挑戰。而利用電場或磁場的微觀操控也是類似的情況。
近日,來自德國維爾茨堡大學物理學和天文學院(注:倫琴發現X射線的地方)納米光學組的吳曉飛博士和 Bert Hecht 教授等研究人員首次實現了一種可在二維平面內進行全自由度獨立控制的光驅動微米器件(大小約2 μm,質量約2 pg)。該器件在整體結構和控制機理上與四旋翼無人機十分相似(圖1),因而被稱為微米無人機(microdrone)。
相關研究論文"Light-driven microdrones"于2022年4月21日在線發表在Nature Nanotechnology,并被 Nature 在“Research Highlight”【1】和 Nature Nanotechnology 在“News & Views”【2】中報道。
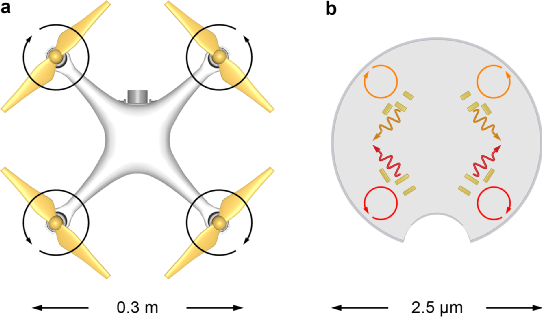
圖1 四旋翼無人機和光驅動微米無人機的對比。
圖源:吳曉飛(德國維爾茨堡大學物理學和天文學院納米光學組)
四旋翼無人機
四旋翼無人機是我們日常生活中見到的最多的一種無人機(圖1a),常用于攝影攝像、貨物運輸、燈光秀以及監視探測等。四旋翼無人機的廣泛應用得益于兩個主要的特點。首先,它是一種可以實現全部六個自由度控制的航空飛行器,而這一點是絕大多數其他航空飛行器做不到的。其次,相較于實現復雜控制的能力,四旋翼無人機的控制機理反而非常簡單。它的全部活動機械部件僅僅是四個旋轉電動機和螺旋槳,而它的所有操控也是通過對每個電動機的獨立控制來實現。這其中的一個巧妙之處是四個螺旋槳分成了旋轉方向相反的兩對(圖1a,黑色箭頭表示旋轉方向),因此通過調節兩對螺旋槳轉速之間的平衡就可以實現對轉動自由度的控制。簡單的結構和機理使得四旋翼無人機非常便于維護和控制。上述這兩個特點又使得四旋翼無人機可以借助內置的傳感器實現自動反饋控制,以保持非常穩定的飛行軌跡和姿態。“四旋翼無人機的這些特點正是我們希望我們的光操控器件也能夠具備的。”吳曉飛博士如此表示。
微米無人機的結構和工作原理
同四旋翼無人機一樣,微米無人機具備四個可獨立控制的發動機,它們被對稱地集成在一個透明圓形薄片內。每個發動機由一個納米光學天線構成,并且由特定波長和特定圓偏振的光場驅動(圖1b中橙色和紅色圓形箭頭分別表示兩個波長和兩個圓偏振)。類似于無線電和微波天線,光學天線是一種在光學波段有效實現傳播場和局域場相互轉換的結構,通常為金屬納米結構,尺寸小于半個光波長。當垂直于器件入射的光照射到這些納米天線上時,它們會將相應的光分量沿特定的方向散射出去(如圖1b中的橙色和紅色的波狀小箭頭所示),從而產生橫向的反作用力,推動器件的移動或轉動。從圖1還可以看出,和四旋翼無人機一樣,微米無人機的四個發動機也是分成了手性相反的兩對。
兩個波長和兩個圓偏振一共可以形成六種基本組合,分別可以產生二維平面內的三個自由度的六個方向的運動,即前?后、左?右的平動以及順時針?逆時針的轉動,如圖2所示。這些對基本自由度的控制就構成了器件沿任意軌跡運動的基礎。需要指出的是,在進行復雜軌跡的控制時,每個波長的光其實是兩個圓偏振分量的疊加,因此不是純圓偏振光。
納米發動機的原理決定了即使使用寬場光同時照射四個發動機,也不會造成對各個發動機控制的串擾。另外由于圓偏振光的連續旋轉對稱性,發動機對驅動光的響應也與器件的朝向角度無關。這就意味著,當使用兩個波長的重疊的寬場光來驅動微米無人機時,所有的操控僅僅通過調控每個發動機對應的光分量的功率就可以實現。這一點也是和四旋翼無人機一致的地方,即控制機理非常簡單。
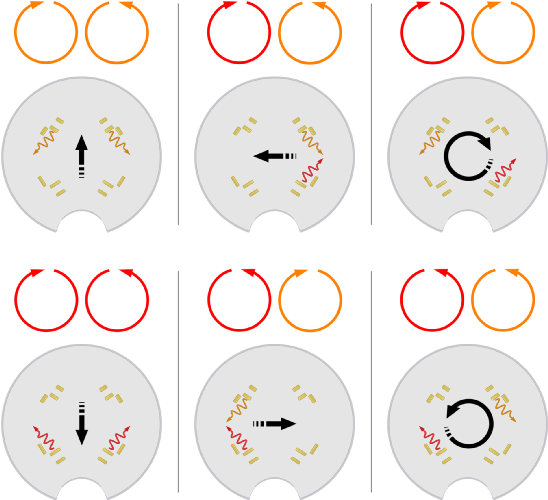
圖2 微米無人機三個基本自由度的控制(黑色箭頭表示運動方向)
圖源:吳曉飛(德國維爾茨堡大學物理學和天文學院納米光學組)
器件的制備
納米發動機的設計與制備是這項研究成功的關鍵。在制備方面,吳曉飛根據多年積累的微納米加工的技術和經驗,開發出一種高效和高精度的單晶金納米結構的制備方法。該方法利用先進的氦離子顯微鏡的聚焦離子束在化學合成的單晶金片上刻出納米發動機結構的輪廓,然后再將整個金片從基底上揭下來,從而將發動機結構留在基底上。刻蝕所利用的圖形則是基于每個像素的坐標、劑量和順序,通過腳本程序產生。相比于傳統的用聚焦離子束刻蝕制備納米結構的方法,該方法不僅大大節約了刻蝕的時間,而且在很大程度上改善了最終結構的形貌和精度(圖3a)。這也是世界上首次報道利用氦離子束刻蝕來批量制備較復雜的納米結構。在完成納米發動機結構的制備后,微米無人機的機身則是通過電子束光刻和化學腐蝕的方法制備而成(圖3b),即用具有所需形狀的光刻膠薄片(厚度200 nm)將納米發動機包覆于內部,起到對發動機結構的固定和保護作用。
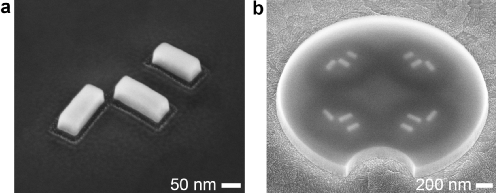
圖3 納米發動機和微米無人機的掃描電鏡顯微圖(上下40°傾斜)
圖源:吳曉飛(德國維爾茨堡大學物理學和天文學院納米光學組)
二維平面全自由度控制的實驗證明
視頻1展示了對微米無人機在二維平面上操控的一些初步驗證結果,包括三個基本自由度的控制和沿較復雜的路徑的運動(8字形和螺旋線)。其中可以明顯看到由于布朗運動的影響,器件的運動軌跡并不平滑。這也是該項研究接下來要解決的問題。
研究展望
微米無人機的概念和原理可以擴展到三維運動的全部六個自由度的操控,而全自由度的獨立控制使得利用反饋控制來自動矯正諸如布朗運動等帶來的擾動成為可能。維爾茨堡大學的科學家們期待在不遠的將來可以實現微米無人機的穩定的三維運動以及懸停(位置與姿態的保持,即便是在液體中),就像四旋翼無人機所能做到的那樣,由此將微觀操控技術推進到一個全新的水平。他們相信,以光驅動微米無人機為基礎,人們可以探索很多新奇的應用。除了比較直接的微觀物體的轉移與操控等應用外,還可以將一些功能性的光學器件裝配在微米無人機上,例如納米光鑷、傳感器、金屬探針等等,從而將這些器件利用在特殊的情形或環境中,甚至執行對微觀環境的精確掃描。
審核編輯 :李倩
-
微波天線
+關注
關注
0文章
21瀏覽量
12003 -
納米
+關注
關注
2文章
693瀏覽量
36955 -
無人機
+關注
關注
228文章
10356瀏覽量
179696
原文標題:Nat. Nanotechnol. | 光驅動微米無人機
文章出處:【微信號:ZHISHIKU-Pro,微信公眾號:知識酷Pro】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一種基于深度學習的二維拉曼光譜算法

二維碼識讀設備有哪些類型
labview按行讀取二維數組之后再按讀取順序重新組成二維數組如何實現?
二維力傳感器怎么安裝,在安裝二維力傳感器的安裝步驟

技術|二維PDOA平面定位方案

二維PDMA可以使用描述符鏈嗎?
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
二維碼掃碼模塊嵌入到電梯設備里

飛凌嵌入式ElfBoard ELF 1板卡-在線二維碼生成器
基于FPGA的六自由度機器人視覺伺服控制方案設計

一文讀懂六自由度激光跟蹤儀

PCB線路板鐳雕二維碼需要的注意事項

二維材料層的共振拉曼光譜






 工商網監
工商網監
評論