") 汽車E/E架構(gòu)的五大域控制器
汽車E/E架構(gòu)的五大域控制器
根據(jù)國外主流供應(yīng)商的總結(jié)經(jīng)驗(yàn),現(xiàn)如今行業(yè)中將汽車E/E架構(gòu)按功能劃分為動力域(安全)、底盤域(車輛運(yùn)動)、座艙域(信息娛樂)、自動駕駛域(輔助駕駛)和車身域(車身電子)五大區(qū)域,每個區(qū)域?qū)?yīng)推出相應(yīng)的域控制器,最后再通過CAN/LIN等通訊方式連接至主干線甚至托管至云端,從而實(shí)現(xiàn)整車信息數(shù)據(jù)的交互。
1、動力域控制器
動力域控制器是一種智能化的動力總成管理單元。借助CAN/FLEXRAY實(shí)現(xiàn)變速器管理,引整管理電池監(jiān)控交流發(fā)電機(jī)調(diào)節(jié)。其優(yōu)勢在于為多種動力系統(tǒng)單元(內(nèi)燃機(jī)、電動機(jī)\發(fā)電機(jī)、電池、變速箱)計(jì)算和分配扭矩通過預(yù)判駕駛策略實(shí)現(xiàn)CO2減排通信網(wǎng)關(guān)等,主要用于動力總成的優(yōu)化與控制,同時(shí)兼具電氣智能故障診斷智能節(jié)電、總線通信等功能。
以多核安全微處理器為核心的硬件平臺對動力域內(nèi)子控制器進(jìn)行功能整合,集成各ECU的基本功能需要的硬件針對動力域VClLIverterTCU BMS和DCDO等高級的域最次算法提供當(dāng)力支持以ASIL-C安全等級為目標(biāo),具備SOTA信息安全、通訊管理等功能。
支持的通訊類型包括CAN/CAN-FD,GigabitEthernet并對通訊提供SHA-256加密算法支持面向CPU\GPU發(fā)展,需要支持AdapativeAUTOSAR環(huán)境,或支持POSIX標(biāo)準(zhǔn)接口的操作系統(tǒng)。
2、底盤域控制器
底盤域是與汽車行駛相關(guān),由傳動系統(tǒng)、行駛系統(tǒng)轉(zhuǎn)向系統(tǒng)和制動系統(tǒng)共同構(gòu)成。隨著汽車智能化發(fā)展,智能汽車的感知識別、決策規(guī)劃、控制執(zhí)行三個核心系統(tǒng)中,與汽車零部件行業(yè)最貼近的是控制執(zhí)行端,也就是驅(qū)動控制、轉(zhuǎn)向控制、制動控制等,需要對傳統(tǒng)汽車的底盤進(jìn)行線控改造以適用于自動駕駛。
線控底盤主要有五大系統(tǒng),分別為線控轉(zhuǎn)向線控制動、線控?fù)Q擋線控油門線控懸掛,線控轉(zhuǎn)向和線控制動是面向自動駕駛執(zhí)行端方向最核心的產(chǎn)品。
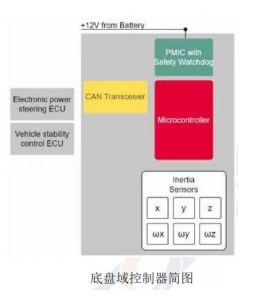
底盤域控制器應(yīng)采用高性能、可擴(kuò)展的安全計(jì)算平臺,并支持傳感器-群集及多軸慣性傳感器,并且可檢查和慣性傳感器信號融合實(shí)現(xiàn)車輛動態(tài)模型的高性能安全計(jì)算,同時(shí)達(dá)成高性價(jià)比。現(xiàn)如今底盤電控越來越普及,底盤上電控產(chǎn)品的數(shù)據(jù)往往可以達(dá)到10個以上,當(dāng)前電子底盤系統(tǒng)以零部件劃分,如車身穩(wěn)定控制系統(tǒng)ESC電子助力系統(tǒng)IBS電子轉(zhuǎn)向系統(tǒng)EPS電子縣架等,各個子系統(tǒng)屬于不同供應(yīng)商或OEM的不同開發(fā)部門,同時(shí)每個子系統(tǒng)都擁有獨(dú)立的汽車動力控制系統(tǒng)和車輛動態(tài)控制模型,此外每個底盤電子產(chǎn)品的進(jìn)行車輛控制的側(cè)重點(diǎn)也有不同,如舒適性,操控性以及安全性。以上這些現(xiàn)狀導(dǎo)致了在底盤電控開發(fā)上,軟硬件耦合關(guān)系強(qiáng),存在重復(fù)研發(fā),開發(fā)成本高,各子系統(tǒng)存在相抵的負(fù)作用種種問題,使得車輛控制無法達(dá)到最優(yōu)的狀態(tài)。
正是在這樣的背景下,在高度自動駕駛領(lǐng)域,迫切需要底盤域控制器產(chǎn)品的出現(xiàn)。實(shí)現(xiàn)轉(zhuǎn)向、制動懸架的集中控制軟硬件分離;車輛的橫向縱向垂向協(xié)同控制更好的服務(wù)于ADAS全面提高整車性能。
首先結(jié)合現(xiàn)有底盤電子產(chǎn)品的功能定義,以及高度自動駕駛系統(tǒng)的需求,底盤域控制器需要實(shí)現(xiàn)如下的功能:
自動駕駛-車輛執(zhí)行控制
●指令模式仲裁控制:底盤域控制器不僅需要執(zhí)行上層感知層和決策層的指令,更需要發(fā)揮自動駕駛“小腦”的作用結(jié)合整車車輛狀態(tài)穩(wěn)定性安全性綜合判斷,決策出更優(yōu)的控制指令。
●橫向縱向垂向線控執(zhí)行控制:進(jìn)行橫向縱向垂向控制,實(shí)現(xiàn)6自由度的協(xié)同控制。
●車輛運(yùn)動狀態(tài)控制:向上層反饋當(dāng)前車輛運(yùn)動狀態(tài),使得決策層更加有效的進(jìn)行車輛控制。
●整車穩(wěn)定性控制車輛姿態(tài),狀態(tài)識別及預(yù)測主動垂向穩(wěn)定控制。
●車身穩(wěn)定性控制后輪轉(zhuǎn)向控制
舒適性控制
●駕駛模式切換
●地形自適應(yīng)控制
●駕駛工況
●自適應(yīng)控制
●智能懸架控制
●綜合控制
●轉(zhuǎn)向助力
●制動助力
●駐車控制
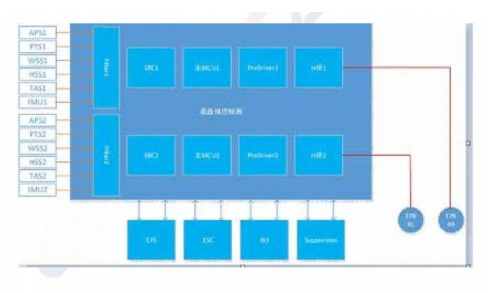
其次為了滿足高度自動駕駛的要求,需要重點(diǎn)考慮底盤域控制器的冗余設(shè)計(jì),需要包括如下
●冗余特行傳感器端,包括加速踏板開度,制動踏板開度,輪速傳感器,車身高度傳感器,方向盤轉(zhuǎn)角力矩傳感器,慣量傳感器等,均需要有冗余備份。
●在域控制器內(nèi)部,需要有雙路的主控芯片,電源管理芯片,預(yù)驅(qū)芯片
●在通訊端,需要有冗余的網(wǎng)絡(luò)設(shè)計(jì)
3、智能座艙域控制器
智能座艙域控制器需要具備卓越的處理性能,以支持座艙域的應(yīng)用,如語音識別,手勢識別等;提供優(yōu)秀的顯示性能支持,同時(shí)支持虛擬化技術(shù),支持一芯多屏顯示,滿足各種尺寸的儀表屏及中控屏幕顯示需要,并將不同安全級別的應(yīng)用進(jìn)行隔離。
同時(shí)提供對外對內(nèi)的通訊能力搭載5G千兆以太網(wǎng)wif6等技術(shù),提供穩(wěn)定、高速的通信網(wǎng)絡(luò)以輕松應(yīng)對VR/AR4K乃至8K視頻等高帶寬應(yīng)用的網(wǎng)絡(luò)要求。針對公網(wǎng)通訊連接提供可靠的網(wǎng)聯(lián)服務(wù)實(shí)現(xiàn)遠(yuǎn)程控制、整車OTA。
提升算力平臺、集成度和感知通信能力。
第一、基于更高算力的座艙域控制器芯片開發(fā)產(chǎn)品集成度更高。集成儀表T-BOX和車機(jī)、空調(diào)控制、 HUD、后視鏡、DMS等。
第二、開發(fā)AR/抬頭顯示HUD內(nèi)后視鏡替代屏外后視鏡替代視覺系統(tǒng)儀表屏、中控屏、副駕顯示屏后排娛樂屏等多屏互動交互方案,提升用戶體驗(yàn)。
第三,基干win65GCV2X以及多模融合的高精定位技術(shù),開發(fā)智能天線產(chǎn)品,通信可靠性高,低時(shí)延,高帶寬為智能網(wǎng)聯(lián)汽車提供多重?zé)o線通訊整合的車聯(lián)網(wǎng)方案。
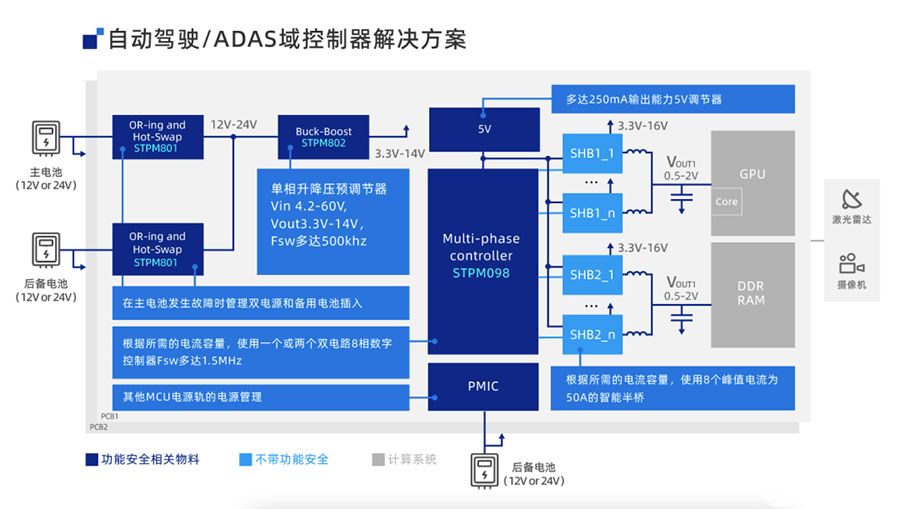
4、自動駕駛域控制器
隨著自動駕駛的來臨,其所涉及的感知控制、決策系統(tǒng)復(fù)雜性更高,與車身等其它系統(tǒng)的信息交互控制的場景也越來越多,各方都希望其能變成一個模塊化的、可移植性的、便于管理的汽車子系統(tǒng)。因此。專門定位于自動駕駛的域控制器系統(tǒng)就應(yīng)運(yùn)而生了。
自動駕駛的域控制器。需要具備多傳感器融合。定位,路徑規(guī)劃,決策控制,無線通訊,高速通訊的能力。
第一,通常需要外接多個攝像頭、毫米波雷達(dá)激光雷達(dá),以及IMU等設(shè)備,完成的功能包含圖像識別數(shù)據(jù)處理等,因此外圍接口可根據(jù)應(yīng)用場景按需擴(kuò)展增加。
第二,自動駕駛域控制器需要感知環(huán)境和實(shí)現(xiàn)信息融合,邏輯運(yùn)算和決策控制,適應(yīng)深度學(xué)習(xí)算法超大算力需求故一般采用GPU或是人工智能芯片TPU處理承擔(dān)大規(guī)模浮點(diǎn)數(shù)并行計(jì)算包括了攝像頭、激光雷達(dá)等識別、融合、分類,因此需要域控制器提供足夠可擴(kuò)展的算力支撐,同時(shí)平臺算力性能可擴(kuò)展硬件擴(kuò)展能力強(qiáng)。
第三為應(yīng)對功能安全、冗余監(jiān)控車輛控制,保證可靠性滿足ISO26262功能安全ASIL-D的要求一般采用安全MCU實(shí)現(xiàn)。
第四,域控制器與其他域交互能力需要支持未來數(shù)據(jù)量增長,采用支持千兆以太網(wǎng)或萬兆以太網(wǎng)。
中國L2級以上智能汽車市場已經(jīng)進(jìn)入快速滲透期預(yù)計(jì)2025年將超過40%。隨著新一代E/E普及,預(yù)計(jì)2025年自動駕駛域控制器出貨量將超過400萬臺套。目前自動駕駛域控制器行業(yè)演變形成傳統(tǒng)外資Tier1本土Tier1互聯(lián)網(wǎng)科技與軟件公司、整車企業(yè)四大陣營,擁有軟硬件技術(shù)融合的公司優(yōu)勢相對較為突出。外資Tier企業(yè)傾向于一攬子域控制解決方案的“交鑰匙”工程,而國內(nèi)Tier1企業(yè)偏向采用協(xié)同分工的模式。
5、車身域控制器
隨著整車發(fā)展,車身控制器越來越多,為了降低控制器成本,降低整車重量,集成化需要把所有的功能器件,從車頭的部分車中間的部分和車尾部的部分如后剎車燈、后位置燈、尾門鎖、甚至雙撐桿統(tǒng)一連接到一個總的控制器里面。
車身域控制器從分散化的功能組合,逐漸過渡到集成所有車身電子的基礎(chǔ)驅(qū)動、鑰匙功能、車燈、車門、車窗等的大控制器。車身域控制系統(tǒng)綜合燈光、雨刮洗滌、中控門鎖、車窗控制;PEPS智能鑰匙、低頻天線、低頻天線驅(qū)動、電子轉(zhuǎn)向柱鎖IMMO天線網(wǎng)關(guān)的CAN可擴(kuò)展CANFD和FLEXRAY、LIN網(wǎng)絡(luò)、以太網(wǎng)接口;TPMS和無線接收模塊等進(jìn)行總體開發(fā)設(shè)計(jì)。車身域控制器能夠集成傳統(tǒng)BCMPEPS、紋波防夾等功能。
從通信角度來看,存在傳統(tǒng)架構(gòu)-混合架構(gòu)-最終的VehicleComputerPlatform的演變過程。這里面通信速度的變化,還有帶高功能安全的基礎(chǔ)算力的價(jià)格降低是關(guān)鍵,未來在基礎(chǔ)控制器的電子層面兼容不同的功能慢慢有可能實(shí)現(xiàn)。
采用業(yè)內(nèi)最高規(guī)格的域控MCU實(shí)現(xiàn)功能安全目標(biāo)。通過多核安全處理器平臺,將不同功能、不同安全等級、不用算力要求的應(yīng)用置于不同的核運(yùn)行,降低整個系統(tǒng)運(yùn)行故障風(fēng)險(xiǎn)。同時(shí)具有豐富的通信資源:支持16路CAN-FD24路LIN2路以太網(wǎng)等總線資源,提供穩(wěn)定、高速的通信網(wǎng)絡(luò),能輕松應(yīng)對各種網(wǎng)絡(luò)要求;軟件系統(tǒng)支持AUTOSARCPAUTOSARAP車載智能操作系統(tǒng),以實(shí)現(xiàn)分層設(shè)計(jì),使上層應(yīng)用完全獨(dú)立于硬件平臺開發(fā),增強(qiáng)了系統(tǒng)的可移植性和軟件模塊復(fù)用性,使得應(yīng)用設(shè)計(jì)的擴(kuò)展更加豐富。升級域控制器框架和接口技術(shù),基于跨域控制通信系統(tǒng),提升跨域權(quán)限和沖突管理及算力優(yōu)化配置:
1) 升級域控制器框架和接口技術(shù)。基于跨域控制通信系統(tǒng)提升跨域權(quán)限和沖突管理及算力優(yōu)化配置;
2) 升級跨域控制器集成技術(shù)。分析跨域通訊的數(shù)據(jù)交互的延時(shí)特性建立跨域控制系統(tǒng)集成框架;
3) 升級架構(gòu)系統(tǒng)的硬件及器件的冗余性,加強(qiáng)軟件的安全策略,實(shí)現(xiàn)跨控制域的冗余容錯技術(shù)框架和算法;
4) 針對車身域需要的控制算法(新型傳感器算法、新型執(zhí)行器控制算法;提升熱管理系統(tǒng)和車身控制算法等)提供算力支持,采用高性能的MPU為預(yù)留擴(kuò)展各新型算法的算力能力。
當(dāng)下,量產(chǎn)車型搭載了域控制器。例如的吉利星越L搭載的“CMA超級母體”架構(gòu)首發(fā)搭載的(跨)域集中式電氣功能架構(gòu),借助車輛域控制器實(shí)現(xiàn)動力控制、智駕控制、底盤控制、云端協(xié)同等功能域的跨域高速運(yùn)算與功能高度集成協(xié)同管理,讓自動駕駛控制管理實(shí)現(xiàn)集中,敏捷等特性。在此之外,去年6月上市的嵐圖FREE去年上市的小鵬P7紅旗H9等諸多車型均已應(yīng)用了域控制器。
總結(jié)
面對汽車新E/E架構(gòu)的轉(zhuǎn)型升級,軟件架構(gòu)逐步實(shí)現(xiàn)分層解耦,硬件從分布式向域控制/中央集中式發(fā)展,車載網(wǎng)絡(luò)通信從LN/CAN總線向以太網(wǎng)方向發(fā)展。在這個轉(zhuǎn)型中,重要的關(guān)鍵特征是需要有標(biāo)準(zhǔn)化的控制器的引入。標(biāo)準(zhǔn)域控制器的形成,和面向SOA化的軟件架構(gòu)需要逐漸清晰,車企可以更容易的進(jìn)行上層應(yīng)用軟件開發(fā)功能的更新和升級提供個性化差異化的功能與服務(wù)加快車型向智能化發(fā)展。
標(biāo)準(zhǔn)化域控制器產(chǎn)品及面向SOA的軟件架構(gòu)將加快汽車產(chǎn)業(yè)向智能化快速發(fā)展。在電子電器架構(gòu)變化過程當(dāng)中,逐漸的共識是中央域控制器和自動駕駛域控制器可能是最先引入,并且將成為影響最大的兩個域控制器。如何用最短的周期、高效開發(fā)的方法有限的開發(fā)資源,提升智能化水平,中央域控制器和自動駕駛域控制器帶來的效果是最明顯的,它會解決整車軟件的升級、T化基礎(chǔ)設(shè)施的建設(shè)以及自動駕駛?cè)蚬δ苘浖拈_發(fā)和升級。
-
mcu
+關(guān)注
關(guān)注
146文章
16984瀏覽量
350293 -
電池監(jiān)控
+關(guān)注
關(guān)注
0文章
134瀏覽量
14019 -
自動駕駛
+關(guān)注
關(guān)注
783文章
13682瀏覽量
166139
發(fā)布評論請先 登錄
相關(guān)推薦
2006 年微控制器五大趨勢-架構(gòu)篇(微控制器常用型態(tài)分析)
域控制器是下一代智能汽車架構(gòu)的關(guān)鍵
介紹汽車區(qū)域控制器的一些關(guān)鍵技術(shù)和MCU解決方案
利爾達(dá)攜手ST共同打造汽車域控制器電源管理解決方案
汽車ADAS域控制器SoC架構(gòu)介紹
汽車電子電氣架構(gòu)集成化過程中的域控制器
面向跨域融合的整車運(yùn)動域控制器(VCU8.5)
詳解域控制器的四大支柱
什么是域控制器?OEM為什么要轉(zhuǎn)向域控制器?

整車域控制器的經(jīng)典五域詳解

域控制器上AUTOSAR AP的優(yōu)勢和挑戰(zhàn)

汽車五大域控制器有哪些?汽車域控制器和ecu的區(qū)別
汽車區(qū)域控制器架構(gòu)趨勢下的SmartFET應(yīng)用
汽車區(qū)域控制器架構(gòu)趨勢下,這三類的典型電路設(shè)計(jì)正在改變

小鵬汽車與大眾汽車宣布簽署E/E架構(gòu)技術(shù)合作框架協(xié)議





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論