 合成孔徑雷達背景簡介
合成孔徑雷達背景簡介
合成孔徑雷達背景簡介
雷達是由二戰中的軍事需求發展起來的,最初用于跟蹤惡劣天氣及黑夜中的飛機和艦船。隨著射頻(RF)技術、天線以及數字技術的發展,雷達技術也得到了穩步的發展。
早期的雷達系統利用時間延遲測量雷達與目標(雷達反射體)之間的距離,通過天線指向探測目標方位,繼而又利用多普勒頻移檢測目標速度。
1951 年,研究人員發現,通過對多普勒頻移進行處理,能夠改善波束垂直向上的分辨率。根據這一原理,就可以利用雷達得到二維地表圖像。這種通過信號分析技術來構建一個等效長天線的思想稱為合成孔徑雷達(Synthetic Aperture Radar,簡稱SAR)。
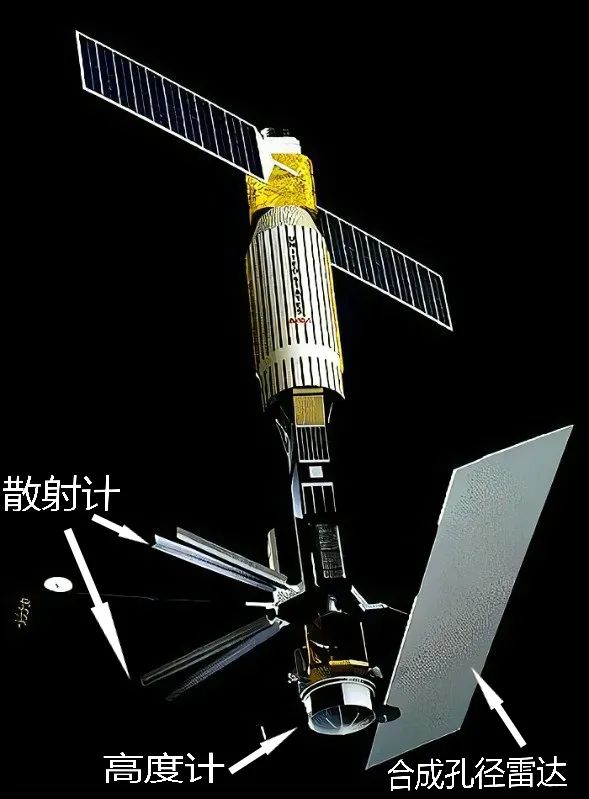
許多 SAR 的基礎技術是在機載平臺上發展起來的,直到第一顆星載 SAR 的發射才引起了遙感領域對這種新型傳感器的關注。1978 年,NASA 的 SEASAT 衛星(如下圖所示)向全世界展示了 SAR 獲得高清晰度地表圖像的能力。SEASAT 的發射促進了包括 SAR 數字處理器及 SAR 應用研究(如海浪波長、高度及方向測量等)在內的許多遙感領域技術的發展。
雷達系統接收到的 SAR 數據是散焦的,看上去很像隨機噪聲。與全息技術類似,回波數據的基本信息隱藏在相位中,所以需要一個對相位敏感的處理器來獲得聚焦圖像。
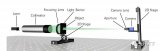
利用傅里葉光學原理,聚焦可以通過激光波束和透鏡組來完成。將雷達回波數據記錄在黑白膠片上,用一個激光束瞄準并照射膠片,利用透鏡組將這些數據進行一次實時二維傅里葉變換,然后通過衍射光柵來聚焦數據,再經過另一組透鏡進行傅里葉變換,就可以在膠片上獲得最終的圖像。
通過 SAR 光學處理器可以得到聚焦良好的圖像,但需要對安放在光路上的高質量透鏡組進行精確的調整。雖然除去膠片沖洗時間,數據處理是實時的,但仍然需要一個熟練的操作員來控制圖像的質量,并且很難做到自動化處理。另外,最終圖像的動態范圍也受限于輸出膠片。
SEASAT 之后,人們開始集中力量開發 SAR 數字處理器。回波數據經過數字化后,記錄在膠帶或磁盤上。20 世紀 70 年代后期,256KB 內存對于計算機來說已經相當大了,當時的磁盤容量和運算速度是非常低的。盡管如此,在 1978 年還是建立了一臺 SAR 數字處理器來處理 SEASAT 數據,該處理器處理一幅 40kmx40km 大小的 25m 分辨率圖像需要 40h。同樣的數據用今天的桌面工作站處理只需要幾十秒。
開發 SAR 數字處理算法需要將光學處理方法進行完整的移植。其中,字節長度、縮放比例、轉角、插值以及快速卷積等都是需要考慮的細節。經過一系列原型化開發,1978 年,著名的精確數據處理算法:距離多普勒算法(range Doppler algorithm,簡稱RDA),人們很快就認識到 SAR 數字處理的優勢和潛力,數字化方法也旋即成為主流。
1978 年以后,RDA 經過了多次改進,其他數字處理算法也不斷涌現,其中有些是針對特殊應用的。過去30年里絕大部分雷達系統方面的革新都是由數字技術在雷達系統設計(尤其是數據處理)中的應用帶來的。隨著算法處理速度和雷達系統的不斷改進,每年都有功能更強大的遙感雷達被設計出來。
SAR 基礎
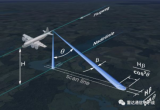
在遙感中,SAR 借助機載或星載平臺獲得地表圖像。這一過程是通過雷達波束沿著與傳感器運動矢量近乎垂直的方向發射相位調制(phase—encoded)脈沖,接收并記錄經地表反射后的回波來完成的。
為形成一幅圖像,需要在兩個互相正交的軸向上進行強度測量。對于 SAR 來說,其中一個軸向(圖像 x 軸)平行于雷達波束指向,在這個方向上,回波延時正比于雷達與散射體之間的距離。通過測量回波延時,雷達就能沿圖像 x 軸將回波置于正確位置上。但實際上,天線波束與地面之間并不是平行的,波束指向與雷達運動方向之間也不是嚴格垂直的,由此造成的幾何畸變需要在處理過程中加以校正。
圖像的第二個軸向(圖像 y 軸)由傳感器的航向確定。當雷達在地表上方沿直線飛行時,雷達波束以近似相等的速度掃過地面。雷達發射電磁脈沖串并接收回波脈沖,這些回波經過處理后,就能依據當前的傳感器位置而出現在圖像 y 軸上,即產生了具有正確幾何坐標的圖像。類似于旋轉雷達波束的方位向, y 軸方向又稱為方位向(沿航跡向)。不同的是,對于 SAR 來說,方位向是通過雷達的線性移動來獲得的,而不是像靜止雷達那樣通過波束旋轉來獲得的。
SAR 的不同工作模式
合成孔徑雷達可以按許多不同方式進行工作:
條帶合成孔徑雷達(Stripmap SAR)。在這種模式下,隨著雷達平臺的移動,天線的指向保持不變。天線基本上勻速掃過地面,得到的圖像也是不間斷的。該模式對于地面的一個條帶進行成像,條帶的長度僅取決于雷達移動的距離,方位向的分辨率由天線的長度決定。
掃描合成孔徑雷達(ScanSAR)。這種模式與條帶模式的不同之處在于,在一個合成孔徑時間內,天線會沿著距離向進行多次掃描。通過這種方式,犧牲了方位向分辨率(或者方位向視數)而獲得了寬的測繪帶寬。掃描模式能夠獲得的最佳方位分辨率等于條帶模式下的方位向分辨率與掃描條帶數的乘積。
聚束合成孔徑雷達(Spotlight SAR)。通過擴大感興趣區域(如地面上的有限圓域)的天線照射波束角寬,可以提高條帶模式的分辨率。這一點可以通過控制天線波束指向,使其隨著雷達飛過照射區而逐漸向后調整來實現。波束指向的控制可以在短時間內模擬出一個較寬的天線波束(也就是說一個短天線),但是波束指向不可能永遠向后,最終還是要調回到前向,這就意味著地面覆蓋區域是不連續的,即一次只能對地面的一個有限圓域進行成像。
逆合成孔徑雷達(Inverse SAR,簡稱 ISAR)。到目前為止,我們考慮的都是目標靜止而雷達移動的情況,然而在目標移動而雷達靜止的情況下,SAR 同樣可以工作。這種相反的工作模式稱為“逆合成孔徑雷達”。逆 SAR 的一個例子就是用地基雷達跟蹤衛星航跡。這個概念可以推廣到雷達和目標都運動的情況,例如用機載或星載合成孔徑雷達對波濤洶涌的海面上的艦船進行成像。
雙站合成孔徑雷達(Bistatic SAR)。在這種工作模式下,接收機和發射機分置于不同的位置。對于遙感 SAR 來說,接收機和發射機通常很接近,可以近似成單基模式。
干涉合成孔徑雷達(InSAR)。在這種工作模式下,可以通過復數圖像的后處理來提取地形高度和移位。將兩幅在同一空間位置(差分干涉 SAR)或間隔很小的兩個位置(地形高度干涉 SAR)獲得的復數圖像進行共軛相乘,就能得到一幅具有等高度線或等位移線的干涉圖。
SAR 分辨率
信號處理器在 SAR 分辨率中起著至關重要的作用,因為實際使用中發射脈沖的寬度很寬,必須經過脈沖壓縮技術才能在距離向得到良好的分辨率。經脈沖壓縮后,斜距分辨率等于光速除以二倍的距離處理帶寬。
實際上,脈沖壓縮技術在許多雷達系統中都有應用,而不僅限于 SAR,但是信號處理器的另一個作用卻是 SAR 獨有的,也是 SAR 區別于其他雷達的主要特征。一般雷達的方位向分辨率等于波束角寬與雷達到目標之間的斜距的乘積,即使對于窄波束雷達,幾千米的斜距增量也會導致非常明顯的方位向分辨率惡化。
然而我們注意到,處于雷達波束不同位置的散射體的回波具有不同的多普勒頻移,如果利用這一點來區分不同的方位單元,就可以得到良好的方位向分辨率。這就涉及了“合成孔徑”的概念,并由此給出“SAR”這一名稱的緣由。利用多普勒頻移,可以合成幾千米的孔徑,分辨率也得到相應的提高。
經過處理,最終的方位向分辨率等于天線尺寸的二分之一,而與距離無關。因此,為了得到更好的方位向分辨率,天線尺寸越小越好。一般的天線和透鏡,都是尺寸越大分辨率越高,SAR 的這個特殊性質使得它與普通天線或透鏡的工作原理正好相反。但是,如果天線尺寸過短或作用距離過遠,圖像的信噪比就會低于可接受范圍。
信噪比
SAR 系統的另一個重要參數是圖像信噪比(signal-to-noise,簡稱SNR)。SAR 信號的 SNR 可以由以下“雷達方程”導出。雷達方程表明,雷達接收功率是發射功率、雷達與目標之間的距離以及許多雷達系統和散射體變量的函數。
為建立圖像質量與雷達發射功率之間的定量關系,一般將雷達方程表示成圖像 SNR 的形式,如果圖像包含分布目標(一般指雜波),則 SNR 為
式中,為雷達平均發射功率,為天線增益,為雷達信號波長,為地面目標的歸一化后向散射系數,為光速,是雷達與反射體之間的距離,為玻爾茲曼常數,為接收機溫度,是發射信號帶寬,是接收機噪聲,為系統損耗,為平臺速度,為波束入射角。
平均發射功率:
其中,峰值發射功率,雷達,發射脈沖持續時間。
天線增益是俯仰角和方位角的函數。計算俯仰向的增益時需要將雷達與目標的距離考慮在內;方位向的增益則是合成孔徑角度范圍內天線方向圖的加權平均。是標稱工作溫度下理想接收機的熱噪聲,是實際接收機相對于理想接收機的附加噪聲,是信號在傳輸路徑中的損耗。
當對孤立點目標成像時,由于點目標的尺寸近似于或小于雷達分辨率,因此它的大部分能量集中在圖像的一個點上,點目標 SNR 為
其中,為目標的雷達截面積,為斜距分辨率,為方位向分辨率。
這里使用的是目標的實際(沒有歸一化)雷達截面積,和是數據處理后的分辨率。利用這些公式,可以計算出點目標信雜比或點目標與雜波及噪聲之和的比值。
SAR 的 SNR 與一般雷達 SNR 的主要區別在于對距離的依賴關系不同。根據熟知的平方反比律(即能量均勻分布于整個半徑為的球面),由于雷達能量在發射和接收的傳播中都經過了的衰減,一般雷達 SNR 正比于。
相比而言, SAR 處理器在方位向將回波能量按正比于斜距的長度進行積分,因此消掉了分母中的一個表征能量傳播關系的,導致SAR 的 SNR 正比于。對 SAR 的 SNR 公式的理解并不能幫助我們更好地成像,但是法則將會用于圖像的輻射校正。
距離徙動
合成孔徑處理是針對大量回波脈沖進行的。由于在合成孔徑內傳感器的移動,雷達與目標的距離隨時間變化,這個變化所引發的回波數據的多普勒頻移構成了合成孔徑處理的基礎。然而這種距離變化同時也導致了距離徙動(range cell migration,簡稱RCM)現象,使數據處理變得更復雜了。
雷達接收到回波以后,就對數據進行采樣和存儲。數據處理是一個二維過程,但一般分成距離向和方位向兩個互相獨立的一維處理過程。當回波能量在一個合成孔徑時間內沿距離向沒有明顯的變化時,這種分離是非常簡單的。這里的“明顯”依賴于距離向的采樣密度。
如果回波能量分布沿距離向的變化(或稱距離徙動)超過了一個距離采樣(或距離單元),就認為這種變化是“明顯”的,在成像處理時必須加以考慮。通常處理過程中的RCM 校正是單獨進行的,稱為距離徙動校正(range cell migration correction,簡稱RCMC)。
-The End -
審核編輯 :李倩
-
多普勒
+關注
關注
0文章
76瀏覽量
18258 -
雷達系統
+關注
關注
6文章
243瀏覽量
28647
原文標題:合成孔徑雷達概述
文章出處:【微信號:CloudBrain-TT,微信公眾號:云腦智庫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
相控陣雷達電源芯片詳解
一些著名的微型SAR

基于GIS的SAR多目標智能識別系統
單模光纖數值孔徑一般是多少
激光雷達安全嗎?技術原理解讀激光雷達安全性
SAR的工作模式“知多少”?

如何使用PSoC6制作16位控制調節?
中央域控雷達:4D雷達新時代

SAR的基礎知識和處理過程詳解
激光孔徑測量儀的用途及應用
使用傅里葉疊層成像對運動物體進行高分辨率成像





 工商網監
工商網監
評論