 簡單實用的框架,可用于快速增加或修改IO配置
簡單實用的框架,可用于快速增加或修改IO配置
在一個嵌入式系統中,可能存在許多輸入或輸出的IO口,輸入有霍爾傳感器、紅外對管等,輸出有LED、電源控制開關等。如果說硬件可以一次成型,那么隨便一份代碼都可以完成IO的配置工作,但研發階段的產品,硬件各種修改是難免的,每一次 IO 的修改,對于底層開發人員來說,可能都是一次挑戰。因為一旦有某一個 IO 配置錯誤,或者原來的配置沒有修改正確(比如一個 IO 在原來的硬件適配中是輸入,之后的硬件需要修改成輸出),那么你很難查出來這是什么問題,因為這個時候不僅硬件修改了,軟件也修改了,你需要先定位到底是軟件問題還是硬件問題,所以一個好用的 IO 的配置框架就顯得很有必要了。
有道友會說,不如使用 CubeMx 軟件進行開發吧。
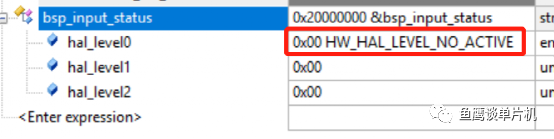
1、這個軟件適用于 ST 單片機,以前還能用,現在,除非你家里有礦,不然誰用的起STM32?基本上都國產化了(雖然有些單片機號稱兼容,但到底還是有些差異的)。2、公司原本的代碼就是使用標準庫,只是因為IO 的變化,你就需要把整個庫換掉嗎?時間上允許嗎?你確定修改后不會出現大問題?3、國產化的芯片可沒有所謂的標準庫和HAL庫供你選擇,每一家都有各自的庫,如果你的產品臨時換方案怎么辦?4、HAL 效率問題。今天魚鷹介紹一個簡單實用的框架,可用于快速增加或修改IO配置,甚至修改底層庫。假設有3個 LED 作為輸出、3 個霍爾傳感器作為輸入:輸入配置代碼:調試的時候,我們可以很方便的查看每個 IO 的狀態是怎樣的,而不用管 0 或 1 到底代表什么意思:#defineGPIOx_DefGPIO_TypeDef*#define GPIOMode_Def GPIOMode_TypeDeftypedef struct{GPIOx_Def gpio;uint16_t msk;GPIOMode_Def pull_up_down;} bsp_input_pin_def;#define _GPIO_PIN_INPUT(id, pull, gpiox, pinx) [id].gpio = (GPIOx_Def)gpiox, [id].msk = (1 << pinx), [id].pull_up_down = (GPIOMode_Def)pull#define GPIO_PIN_INPUT(id, pull, gpiox, pinx) _GPIO_PIN_INPUT(id, pull, gpiox, pinx)#define bsp_pin_get_port(gpiox) ((uint16_t)((GPIO_TypeDef *)gpiox)->IDR)#define bsp_pin_get_value(variable,id) do{ bsp_pin_get_port(bsp_input_pin[id].gpio) & bsp_input_pin[id].msk ? variable |= (1 << id) : 0;} while(0)typedef enum{PIN_INPUT_HALL_0 = 0, // 輸入 IO 定義PIN_INPUT_HALL_1,PIN_INPUT_HALL_2,PIN_INPUT_MAX}bsp_pin_input_id_def;static const bsp_input_pin_def bsp_input_pin [PIN_INPUT_MAX] ={GPIO_PIN_INPUT(PIN_INPUT_HALL_0, BSP_GPIO_PUPD_NONE, GPIOA, 0),GPIO_PIN_INPUT(PIN_INPUT_HALL_1, BSP_GPIO_PUPD_NONE, GPIOB, 8),GPIO_PIN_INPUT(PIN_INPUT_HALL_2, BSP_GPIO_PUPD_NONE, GPIOE, 9),};// 單個 IO 初始化函數void bsp_pin_init_input(GPIOx_Def gpiox, uint32_t msk, GPIOMode_TypeDef pull_up_down){uint32_t temp;assert_param((msk & 0xffff0000) == 0 && gpiox != 0);temp = ((uint32_t) gpiox - (uint32_t) GPIOA) / ( (uint32_t) GPIOB - (uint32_t) GPIOA);/* enable the led clock */RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA << temp, ENABLE);GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = (GPIOMode_Def)pull_up_down;GPIO_InitStruct.GPIO_Pin = msk;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_2MHz;GPIO_Init((GPIO_TypeDef*)gpiox, &GPIO_InitStruct);}// 所有 IO 初始化void gpio_input_init(){bsp_input_pin_def *info;info = (bsp_input_pin_def *)&bsp_input_pin;for(int i = 0; i < sizeof(bsp_input_pin)/sizeof(bsp_input_pin[0]); i++){bsp_pin_init_input(info->gpio, info->msk, info->pull_up_down);info++;}}// 最多支持 32 個 IO 輸入uint32_t bsp_input_all(void){uint32_t temp = 0;bsp_pin_get_value(temp, PIN_INPUT_HALL_0);bsp_pin_get_value(temp, PIN_INPUT_HALL_1);bsp_pin_get_value(temp, PIN_INPUT_HALL_2);return temp;}// 讀取單個 IO 狀態uint32_t bsp_input_level(bsp_pin_input_id_def id){return (bsp_pin_get_port(bsp_input_pin[id].gpio) & bsp_input_pin[id].msk) ? 1 : 0;}typedef enum{HW_HAL_LEVEL_ACTIVE = 0, // 可直接修改為 0 或 1,另一個枚舉值自動修改為相反值HW_HAL_LEVEL_NO_ACTIVE = !HW_HAL_LEVEL_ACTIVE,}hw_input_hal_status_def;typedef struct{hw_input_hal_status_def hal_level0;uint8_t hal_level1;uint8_t hal_level2;}bsp_input_status_def;bsp_input_status_def bsp_input_status;int main(void){USRAT_Init(9600);//必須,進入調試模式后點擊全速運行gpio_input_init();while(1){uint32_t temp = bsp_input_all();bsp_input_status.hal_level0 = (hw_input_hal_status_def)((temp >> PIN_INPUT_HALL_0) & 1);bsp_input_status.hal_level1 = ((temp >> PIN_INPUT_HALL_1) & 1);bsp_input_status.hal_level2 = ((temp >> PIN_INPUT_HALL_2) & 1);}}
 輸出配置代碼:
輸出配置代碼:這個框架有啥好處呢?1、自動完成 GPIO 的時鐘初始化工作,也就是說你只需要修改引腳即可,不必關心時鐘配置,但對于特殊引腳(比如PB3),還是得另外配置才行。2、應用和底層具體 IO 分離,這樣一旦修改了 IO,應用代碼不需要進行任何修改。3、增加或刪減 IO 變得很簡單,增加 IO時,首先加入對應枚舉,然后就可以添加對應的 IO 了。刪除 IO時,只要屏蔽對應枚舉值和引腳即可。4、參數檢查功能, IO 刪除時,因為屏蔽了對應的枚舉,所以編譯時可以幫你發現問題,而增加 IO 時,它可以幫你在運行時檢查該 IO是否進行配置了,可以防止因為失誤導致的問題。#define GPIOx_Def GPIO_TypeDef*#define GPIOMode_Def GPIOMode_TypeDeftypedef struct{GPIOx_Def gpio;uint32_t msk;uint32_t init_value;} bsp_output_pin_def;#define _GPIO_PIN_OUT(id, gpiox, pinx, init) [id].gpio = gpiox, [id].msk = (1 << pinx), [id].init_value = init#define GPIO_PIN_OUT(id, gpiox, pinx, init) _GPIO_PIN_OUT(id, gpiox, pinx, init)#define _bsp_pin_output_set(gpiox, pin) (gpiox)->BSRR = pin#define bsp_pin_output_set(gpiox, pin) _bsp_pin_output_set(gpiox, pin)#define _bsp_pin_output_clr(gpiox, pin) (gpiox)->BRR = pin#define bsp_pin_output_clr(gpiox, pin) _bsp_pin_output_clr(gpiox, pin)typedef enum{PIN_OUTPUT_LED_G,PIN_OUTPUT_LED_R,PIN_OUTPUT_LED_B,PIN_OUTPUT_MAX}bsp_pin_output_id_def;static const bsp_output_pin_def bsp_output_pin [PIN_OUTPUT_MAX] ={GPIO_PIN_OUT(PIN_OUTPUT_LED_G, GPIOA, 0, 0),GPIO_PIN_OUT(PIN_OUTPUT_LED_R, GPIOF, 15, 0),GPIO_PIN_OUT(PIN_OUTPUT_LED_B, GPIOD, 10, 0),};void bsp_pin_init_output(GPIOx_Def gpiox, uint32_t msk, uint32_t init){uint32_t temp;assert_param((msk & 0xffff0000) == 0 && gpiox != 0);temp = ((uint32_t) gpiox - (uint32_t) GPIOA) / ( (uint32_t) GPIOB - (uint32_t) GPIOA);/* enable the led clock */RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA << temp, ENABLE);GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = (GPIOMode_Def)GPIO_Mode_Out_PP;GPIO_InitStruct.GPIO_Pin = msk;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_2MHz;GPIO_Init((GPIO_TypeDef*)gpiox, &GPIO_InitStruct);if(init == 0){bsp_pin_output_clr(gpiox, msk);}else{bsp_pin_output_set(gpiox, msk);}}void bsp_output_init(){bsp_output_pin_def *info;info = (bsp_output_pin_def *)&bsp_output_pin;for(int i = 0; i < sizeof(bsp_output_pin)/sizeof(bsp_output_pin[0]); i++){bsp_pin_init_output(info->gpio, info->msk, info->init_value);info++;}}void bsp_output(bsp_pin_output_id_def id, uint32_t value){assert_param(id < PIN_OUTPUT_MAX);if(value == 0){bsp_pin_output_clr(bsp_output_pin[id].gpio, bsp_output_pin[id].msk);}else{bsp_pin_output_set(bsp_output_pin[id].gpio, bsp_output_pin[id].msk);}}int main(void){USRAT_Init(9600);//必須,進入調試模式后點擊全速運行bsp_output_init();while(1){bsp_output(PIN_OUTPUT_LED_G, 1);bsp_output(PIN_OUTPUT_LED_B, 0);bsp_output(PIN_OUTPUT_LED_R, 1);}}
 5、更改庫時可以很方便,只需要修改對應的宏即可,目前可以順利在 GD32 和 STM32 庫進行快速更換。6、對于輸入 IO 而言,可以方便的修改有效和無效狀態,防止硬件修改有效電平。對于輸出 IO 而言,可以設定初始 IO 電平狀態。7、代碼簡單高效,盡可能的復用代碼,增加一個 IO 只需要很少的空間。8、缺點就是,只對同種配置的 IO 可以這樣用。
5、更改庫時可以很方便,只需要修改對應的宏即可,目前可以順利在 GD32 和 STM32 庫進行快速更換。6、對于輸入 IO 而言,可以方便的修改有效和無效狀態,防止硬件修改有效電平。對于輸出 IO 而言,可以設定初始 IO 電平狀態。7、代碼簡單高效,盡可能的復用代碼,增加一個 IO 只需要很少的空間。8、缺點就是,只對同種配置的 IO 可以這樣用。
審核編輯 :李倩
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
單片機
+關注
關注
6032文章
44525瀏覽量
633261 -
霍爾傳感器
+關注
關注
27文章
707瀏覽量
63104
原文標題:簡單實用IO輸入輸出框架
文章出處:【微信號:zhuyandz,微信公眾號:FPGA之家】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
華納云監視Linux磁盤IO性能命令:iotop,iostat,vmstat,atop,dstat,ioping
。 top命令可用于查看CPU是否正在等待磁盤操作完成。“wa”度量標準顯示IO等待,CPU等待IO完成所花費的時間(以百分比
io口和串口的區別 單片機有多少個io口
等。而串口,即串行通信接口(Serial Communication Interface),是一種數據通信方式,通過一條數據線按照順序傳送數據。IO口和串口在功能和用途上存在顯著區別: 通信方式 : IO口 :實現簡單的輸入輸出
【教程】比Modbus控制更簡單!S7 200 SMART利用Profinet網關擴展IO
PLC自帶IO方法控制擴展IO。一配置Profinet網關首先導入Profinet網關的GSD文件,用于STEP7-MicroWINSMART組態軟件

單片機io口怎么配置成輸出口
單片機IO口配置成輸出口的過程通常涉及對單片機內部寄存器的操作。不同型號的單片機在寄存器配置和編程方式上可能有所不同,但基本原理是相似的。以下是一個通用的步驟,用于將單片機
bootstrap框架和vue框架的區別
Bootstrap和Vue都是目前非常流行的前端開發框架,它們各自具有獨特的優勢和特點。 設計理念 Bootstrap是一個基于HTML、CSS和JavaScript的前端開發框架,主要用于快
遠程IO與分布式IO的區別
在工業自動化和控制系統設計中,遠程IO(Input/Output)和分布式IO是兩個重要的概念。它們各自具有獨特的特點和優勢,適用于不同的應用場景。本文將詳細探討遠程IO與分布式
暖通控制系統可用鋇錸分布式IO系統BL207
可編程邏輯控制功能,可替代DDC部分功能。 BACnet/IP IO系統BL207提供雙網口支持交換機級聯功能,支持標準的BACnet/IP協議,也可用于接入BACnet/IP控制器,可適配江森、霍

自制測試框架(設置界面密碼1)
(設置界面密碼為1)
目前支持的指令如下:
1.沒有任何編程基礎的人快速實現簡易自動化制作;
2.測試后可以直接把數據和結果直接寫入到MES;
3.可持續增加新的功能及模塊;
4.快速實現點
發表于 03-02 19:33
EtherCAT IO的接線方法和流程是怎樣的?
EtherCAT IO的接線方法和流程是怎樣的? EtherCAT是一種用于實時以太網通信的開放式通信協議,具有低延遲和高帶寬的優勢。 EtherCAT IO是EtherCAT網絡中連接到IO
更改晶振后如何修改配置?
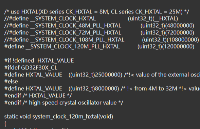
GD32官方提供的固件庫中使用的晶振配置一般為8M或25M,如果讀者使用其他頻率的晶振如何修改配置呢?本文為大家講解如何修改。
激光焊接行業的智能化選擇鋇錸分布式IO
和穩定性。 鋇錸技術分布式IO系統具有良好的擴展性和靈活性。隨著激光焊接技術的發展,對于設備控制的需求也在不斷變化。鋇錸技術的分布式IO系統可以通過簡單地增加
TQT507開發板如何修改和保存內核配置
本文檔介紹如何在開發時修改和保存內核配置,適用于開發板TQT507。 1.修改內核配置 編譯時系統會先檢測當前內核源碼目錄下是否存在.con
T507開發板如何修改和保存內核配置
本文檔介紹如何在開發時修改和保存內核配置,適用于開發板TQT507。1.修改內核配置編譯時系統會先檢測當前內核源碼目錄下是否存在.confi






 工商網監
工商網監
評論