") 無人機如何完成到手光流激光定位操作
無人機如何完成到手光流激光定位操作
近日,北醒聯合云訥舉辦了無人機技術分享直播,兩位主講嘉賓分別是北醒資深產品經理-劉揚,研究生畢業(yè)于法國國立奧爾良大學,在激光雷達領域有多年的行業(yè)經驗與研究;另一位是是云訥科技合伙人-王唐林王總,具有軍工院所、公司從業(yè)經歷,從事工業(yè)級產品開發(fā)近十年。
直播內容從行業(yè)情況、技術原理、應用落地、技術教程等方面深入淺出的進行了分享,期間大家互動火熱對無人機定高等技術有諸多探討與頭腦風暴。
今天小編針對直播回放內容“激光雷達與光流技術如何強強聯手”進行深度解析:
大多數無人機在起飛降落、懸停及水平飛行過程中,需要獲取距離地面的絕對高度信息來控制起降速度及恒定飛行高度,以確保無人機飛行安全。常見的無人機定高傳感器有GPS、毫米波雷達和激光雷達傳感器。GPS在室內使用時存在信號丟失及精度差等問題。毫米波體積較大且?guī)瘦^低,不適用于該場景。Kerloud無人機采用PX4FLOW光學傳感器和北醒單點激光雷達TF-Luna混合感知方案,完美解決無人機在室內飛行定位,起降及懸停等問題。如視頻中所示,按照本文所示的操作步驟可實現無人機半自動室內飛行。
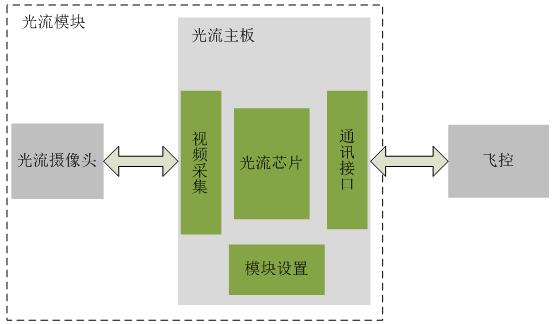
北醒單點激光雷達TF-Luna是一款高幀率、高精度、小體積、高性價比的空間距離傳感器。TF-Luna體積小、重量輕,將其安裝在無人機下方,可以實時探測無人機到正下方地面的距離信息并反饋給無人機。無人機依據TF-Luna實時傳回的高度信息,完成起降、懸停及水平飛行等。
具體表現在,激光雷達實時探測無人機對地高度。當無人機飛行高度小于激光雷達量程時,激光雷達可快速且精準輸出高度信息。當無人機飛行高度高于激光雷達量程時,激光雷達會輸出極大值或0,此時無人機需采用其它傳感器數據,如GPS。在無人機起降過程中,激光雷達可輸出連續(xù)的隨時間變化的距離曲線。
此時采用激光雷達定高的過程是靈活且安全的,飛控系統(tǒng)會根據預設的高度信息,結合激光雷達的距離數據,實時調整飛機上升或下降。當激光雷達輸出的距離值大于設定高度時,無人機將下降,反之則升高,從而維持在一個恒定的高度飛行。最后激光雷達將輔助無人機緩慢下降直至平穩(wěn)落地,避免墜機風險。
激光雷達定高優(yōu)勢
及產品推薦
探測頻率高
測量精度高
體積小,重量輕,易于安裝集成
測距量程遠
平均價格低于毫米波雷達
單點激光雷達視場角小
北醒TF02-Pro激光雷達為例,凈重50g,在無人機下降至低空0.1-40m范圍內,通過最高1000Hz的高頻探測,可輔助無人機獲取距地高度。相較于超聲波測距傳感器,不易受復雜環(huán)境的多次回波干擾,且無探測延時。3°視場角使無人機在定高時,不易因探測光束過大,探測到地面其他干擾物體而產生誤報。
Kerloud UAV
室內光流激光定位操作
Kerloud UAV系列作為云訥科技(深圳)面向無人機系統(tǒng)集成愛好者的高性價比開發(fā)平臺,支持PX4、Dronecode、ROS、Nvidia和Ubuntu等高級軟件社區(qū)。產品設計緊湊,室內外場景通用;機身可搭載樹莓派、Nvidia Jetson電腦及Intel Realsense深度相機等,基于ROS開發(fā)環(huán)境及云訥官方提供的開源SDK,用戶可便捷開展實時圖像處理、深度學習、室內SLAM、室外避障等應用開發(fā)。
搭載光流配置的Kerloud無人機,為用戶以少量設置實現室內定位提供了方便的選擇。該平臺配備有PX4FLOW光學傳感器和北醒TF-Luna激光雷達測距傳感器,PX4FLOW是PX4社區(qū)中的一款基于攝像頭的智能傳感器,在水平速度估計方面表現出色;TF-Luna則可在高度測量中提供厘米級精度。該配置飛機在具備紋理地面的室內環(huán)境中,水平、垂直定位精度分別可達到0.1m、0.05m級別。此外,飛機也支持室外環(huán)境下的無GPS飛行。(本教程將演示Kerloud UAV基于光流實現室內定位的操作方法,更多信息詳見云訥科技官網。)
1. 環(huán)境要求使用光流傳感器,需要室內地面具備豐富的紋理,因此建議用戶使用棋盤紙或其他圖案來對地面進行覆蓋、裝飾。另外,PX4FLOW相機的光照條件也要足夠。
2. 固件設置搭載光流配置的Kerloud無人機在出廠階段已正確配置。面向室內場景,可在QGroundcontrol界面中配置如下參數:
SENS_EN_TF: 2SENS_EN_PX4FLOW: 1EKF2_HGT_MODE: 2EKF2_AID_MASK: 2EKF2_MAG_TYPE: 0EKF2_OF_POS_Y: -0.07
參數說明如下:SENS_EN_TF: 啟動北醒TF測距傳感器驅動程序。SENS_EN_PX4FLOW: 啟動PX4FLOW驅動程序。EKF2_HGT_MODE: 將激光測距儀設置為主要高度信息源。EKF2_AID_MASK: 啟動EKF估計中的光流設置。EKF2_MAG_TYPE: 設置磁力計航向測量為自動模式。EKF2_OF_POS_Y: 設置光流傳感器在體坐標系Y軸的相對位置。
3. 光流對焦設置PX4FLOW傳感器的相機鏡頭在出廠時已調好,官方調參指引可參見:https://docs.px4.io/master/en/sensor/px4flow.html。
簡要陳述:用戶可使用提供的micro-usb線,將PX4FLOW傳感器接入運行有QGC的電腦,然后在QGC設置菜單中選擇PX4FLOW,很快就能在QGC界面中看到來自PX4FLOW相機的圖像。用戶可簡單地放置一本書在地面,將相機抬高到想要飛行的高度(一般為1~3米),擰下固定螺絲,然后通過擰松、擰緊鏡頭尋找焦點位置以實現對焦。當書本的邊緣在圖像中清晰可見時(參見下圖),調焦結果可視為能接受。
4. 傳感器數據查看設置后可以通過QGC地面站查看確認光流傳感器和激光測距傳感器數據:
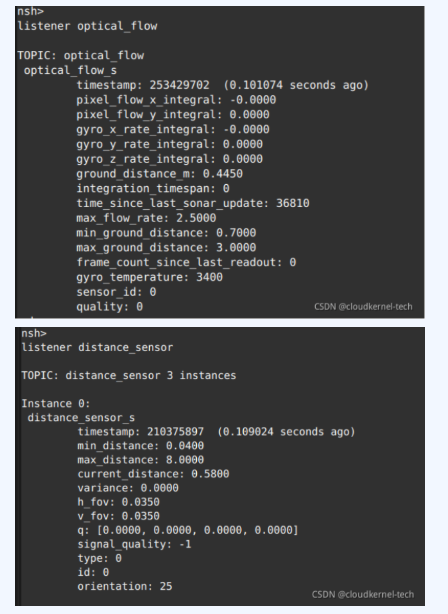
以上4步即可完成無人機到手光流激光定位操作,簡單便捷,基本到手即用。
-
傳感器
+關注
關注
2548文章
50678瀏覽量
752019 -
無人機
+關注
關注
228文章
10340瀏覽量
179636 -
激光雷達
+關注
關注
967文章
3939瀏覽量
189599
發(fā)布評論請先 登錄
相關推薦
光伏電站無人機巡檢系統(tǒng)技術方案

無人機巡檢系統(tǒng)解決光伏電站遮擋問題
光伏無人機巡檢系統(tǒng)的應用
無人機巡檢系統(tǒng)光伏巡檢方案與作用
無人機光伏巡檢較傳統(tǒng)人工巡檢的優(yōu)勢
光伏無人機自動巡檢系統(tǒng)的優(yōu)勢價值
無人機巡檢系統(tǒng)在光伏電站的應用
優(yōu)象無人機光流模塊使用技巧
無人機飛行中定位誤差的影響探究





 工商網監(jiān)
工商網監(jiān)
評論