") 如何制作一個(gè)寵物機(jī)器人
如何制作一個(gè)寵物機(jī)器人
我一直想要一個(gè)寵物機(jī)器人——一個(gè)可以跑來(lái)跑去并能自己照顧自己的寵物,機(jī)器人寵物就是個(gè)不錯(cuò)的選擇。
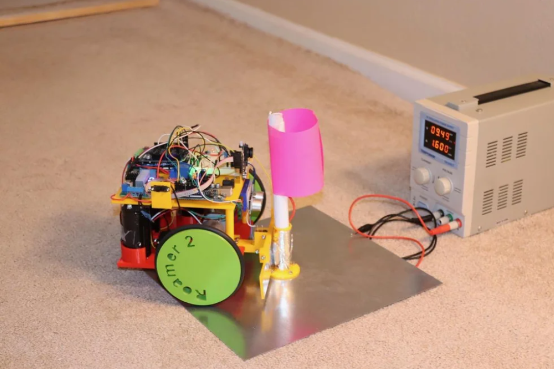
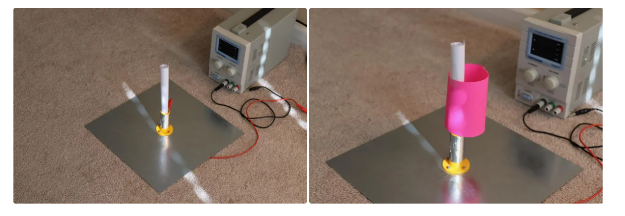
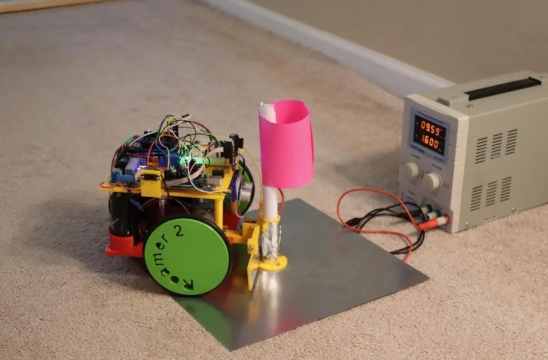
該機(jī)器人的最長(zhǎng)運(yùn)行時(shí)間約為 11 分鐘,但她在 4 分鐘后開(kāi)始尋找充電器(使用 Pixy 相機(jī)和 Arduino)。充電時(shí)間約為兩分鐘。因?yàn)樗怯?a target="_blank">超級(jí)電容器供電,所以她可以充電和放電數(shù)萬(wàn)次(最多任何速率)而不會(huì)降低電容器的性能。充電站是一塊 12“ x 12” 的金屬板,中間有一根桿子。Roamer 2 的前保險(xiǎn)杠接觸桿,彈簧(由伺服電機(jī)降低)接觸金屬板。設(shè)置為 12 伏(最大值)和 1.6 安培(最大值)的臺(tái)式電源提供能量。
補(bǔ)給品
500 法拉,2.8 伏電容器
杠桿開(kāi)關(guān),瞬時(shí)
Arduino*2
電機(jī)護(hù)罩
真空帶
三安培二極管
4.7k 電阻*4
面包板
鋁制膠帶
彈簧,5.5 毫米 x 38 毫米
鋼板
臺(tái)式電源
電線、焊料、3mm 螺絲
3d 打印部件(下文提供下載方式)
齒輪
伺服電機(jī)
小精靈相機(jī)
超聲波模塊
繼電器模塊
第 1 步:
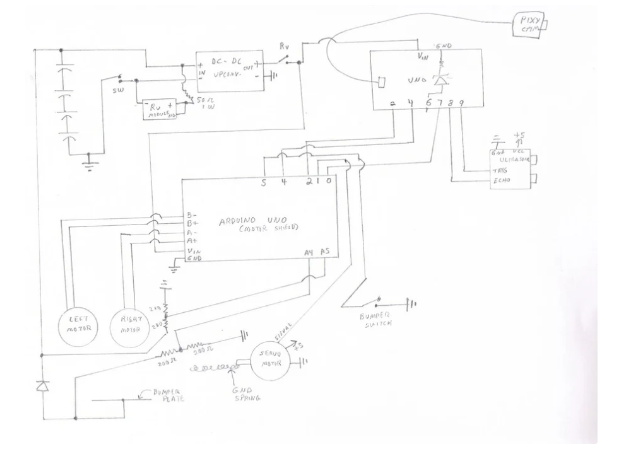
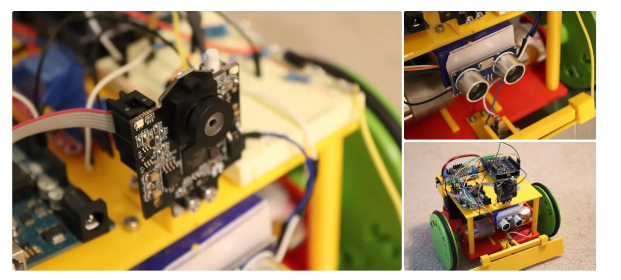
示意圖如下所示。有兩個(gè) Arduino 處理器。一個(gè)管理 Pixy 相機(jī)和超聲波換能器,將結(jié)果發(fā)送到電機(jī)控制 Arduino。
roamer2c_may.ino 點(diǎn)擊下載
left_right_ultrasonic.ino 點(diǎn)擊下載
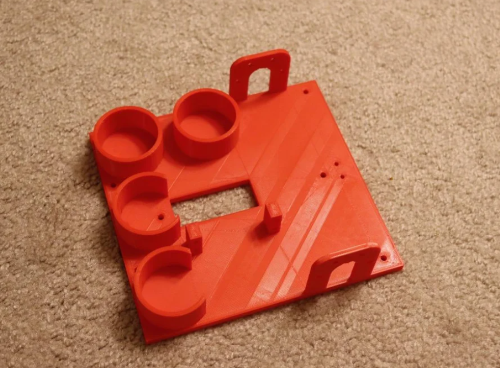
第 2 步:打印3D文件
basea.f3d
basea.stl
charge pole tall.f3d
spring hold 2022.f3d
switch bar.f3d
switch bar.stl
switch holder.stl
slide switch.f3d
motor support.stl
charge pole tall.stl
motor support.f3d
spring hold 2022.stl
wheel.f3d
wheel.stl
slide switch.stl
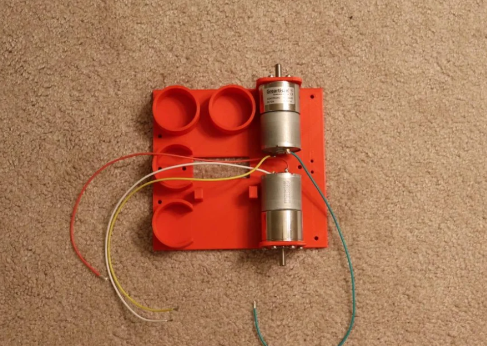
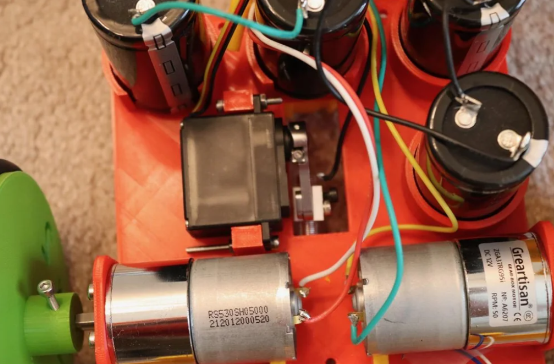
第 3 步:將電機(jī)安裝在底座上
第4步:將彈簧動(dòng)力拾取器連接到伺服電機(jī)

第 5 步:安裝伺服電機(jī)和電容器
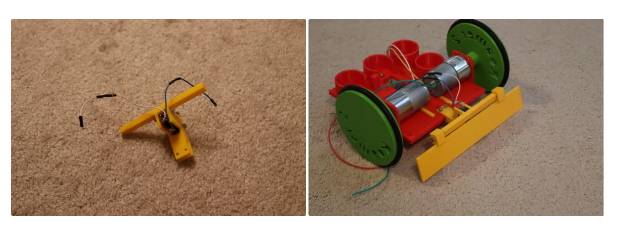
第 6 步:將輪胎(真空帶)安裝在車輪上

第 7 步:將開(kāi)關(guān)連接到開(kāi)關(guān)支架,保險(xiǎn)杠和車輪添加到底座上
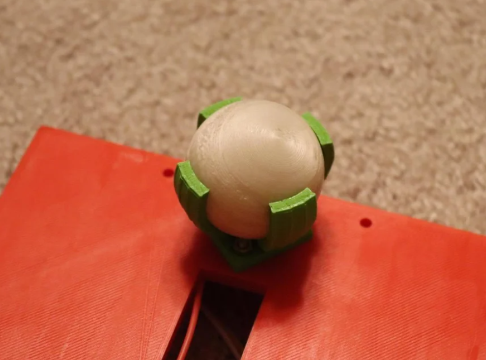
第 8 步:將腳輪添加到底座的后部
第 9 步:在前保險(xiǎn)杠上添加鋁箔膠帶
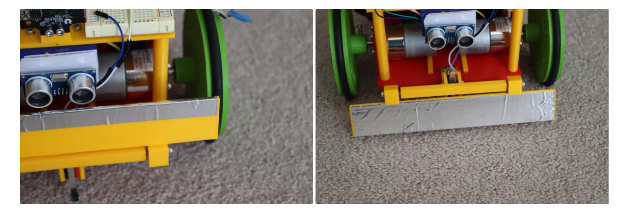
第 10 步:將相機(jī)和超聲波換能器添加到主體
第 11 步:細(xì)節(jié)調(diào)整
第 12 步:最后設(shè)置
-
機(jī)器人
+關(guān)注
關(guān)注
210文章
28226瀏覽量
206606 -
升壓轉(zhuǎn)換器
+關(guān)注
關(guān)注
2文章
653瀏覽量
34869
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論