 關于激光雷達的六個常見誤區
關于激光雷達的六個常見誤區
隨著世界科技向智能化、高效率發展,激光雷達及其應用也受到越來越多的關注。但是,人們對激光雷達技術及性能等方面也存在一些誤解。本文將為大家揭開關于激光雷達的六個常見誤區。
1、激光雷達應用的技術復雜
雖然激光雷達是由不同硬件組成的復雜傳感器,但實際上其基本工作原理相當簡單。傳感器使用飛行時間法,該探測原理類似于蝙蝠使用聲波或雷達使用微波。
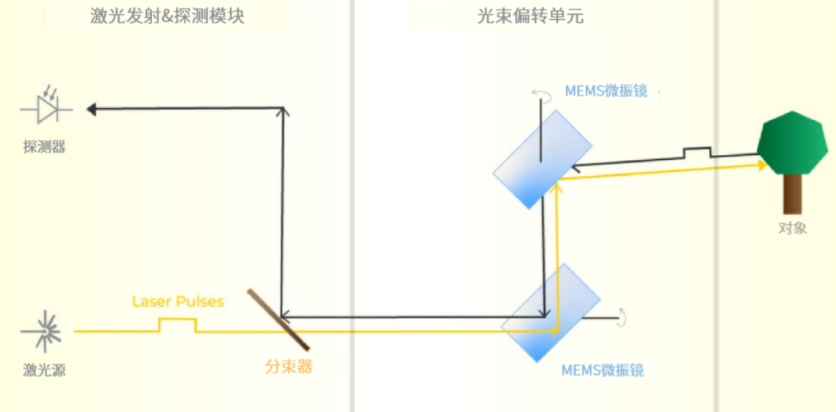
如果我們把傳感器分解成幾個部分,即激光器、探測器和光束偏轉單元,激光雷達就不再是一項令人望而生畏的技術了。激光源首先發出激光脈沖,這些脈沖通過微振鏡偏轉到場景中,探測器檢測反射光,根據激光脈沖發射時間和返回時間精確計算出距離。 每秒鐘重復數千次甚至數百萬次以上這個過程,實時生成精確的3D環境點云。這些3D點云數據易于分析和利用,例如,用于自動駕駛決策。 這項技術是在20世紀60年代早期發明脈沖激光器之后發展起來的,脈沖激光器重復發射光脈沖,而不是采用連續波。
2、在自動駕駛汽車應用中,激光雷達是多余的
埃隆·馬斯克(Elon Musk)在2019年的一次會議上忽視了激光雷達在自動駕駛汽車上的用途,這一事件迄今為止滋生了許多關于激光雷達的謬論。他聲稱,在相機和智能算法的輔助下,激光雷達是多余的,并將一直堅持自己的立場。 攝像機應用不同的圖像識別技術,可以采集彩色視覺圖像,但僅僅采用一個攝像機,只能捕捉到2D數據,很容易導致視覺錯覺和距離誤判。有不少的悲慘例子表明,這些缺陷是危險的,有時甚至是致命的。 相比之下,激光雷達可以可靠地捕捉3D數據,并精確識別出距離和物體尺寸。 融合精確的3D激光雷達數據有助于在攝像機“失明”的情況下依然能夠感知周圍環境,比如在走出隧道后攝像機需要一定時間適應光線變化等場景。 此外,攝像頭生成的2D圖像,表面上看起來可能足夠精確,足以訓練自動駕駛汽車的算法。但它們仍然有很多不精確的地方,會降低機器學習模型的準確性,從而降低車輛感知、預測和決策的能力。促進自動駕駛的機器學習能力需要具有可擴展性,并解決“長尾巴”問題。這意味著僅滿足道路上車輛所面臨的95%的場景是不夠的,基于機器學習的自動駕駛功能還要針對5%的棘手情況進行訓練,同時不斷提高其性能,這需要大量純相機系統數據用于訓練。 相比之下,激光雷達可以提供更多的機器學習預測模型,同時生成更高精度的訓練數據。因此,激光雷達是更可靠、更健壯的自動駕駛系統所必需的傳感器。
3、激光雷達可以完全被其他傳感器取代
關于激光雷達最常見的一個誤解是,它可以被相機或雷達傳感器替代,這種誤解源于人們對這些傳感器技術如何以不同方式對物體進行分類缺乏了解。在理解了這些傳感器的不同能力和產生的數據類型之后,我們會了解到它們在功能上的互補。相機采集到的是2D圖像,提供灰度或顏色信息、紋理和對比度。為了進一步分析這些數據,需要使用圖像識別軟件。因為相機應用的是被動測量原理,物體需要被照亮來檢測。此外,需要兩個或更多的相機來創建3D圖像,以及高計算能力。 雷達測量三維信息,在確定物體距離和速度方面具有極高的精度。然而,分辨率較低,他們無法精確探測(以厘米為尺度)或對物體進行分類。 激光雷達將采集得到的三維數據創建形成點云,根據點云形狀和大小,可以精確地檢測物體,將物體分為不同的類別,如人、汽車、建筑物等。 激光雷達可以收集非常詳細可靠的三維信息,從而填補了其他傳感器技術的不足。在各種環境下可以檢測和準確分類目標,因此在各類傳感器中脫穎而出。來自相機的數據可以用于更深入的分析,雷達收集的距離和速度數據可以用激光雷達進行驗證,以獲得更高的精度。這意味著,未來所有基于傳感器的應用都將集成攝像頭、雷達系統、激光雷達以及其他傳感器。
4、激光雷達不能在惡劣的環境條件下工作
攝像機不能在沒有足夠的環境照明的情況下工作,例如在汽車的應用中,攝像機的探測距離只能達到前照燈的照射距離。相比之下,無論光強度條件如何,激光雷達的探測范圍都可以達到數百米,因為它依賴的是紅外激光束而不是可見光。也就是說,一輛配備了激光雷達傳感器的自動駕駛汽車,即使關掉前照燈,在漆黑的環境下駕駛也能像在白天一樣順暢。 當談到像霧、雨或雪這樣的惡劣條件時,激光雷達在性能上再次展現出明顯的優勢,可以在感知系統中彌補其他傳感器(如相機)的不足。 在雨中,激光雷達通常比相機表現得更好,因為它們的光束很大。這使得光束能夠繞過傳感器反射鏡上的障礙物(如雨滴),因此激光雷達的射程在一定程度上不受影響。相比之下,相機的像素尺寸要比雨滴的尺寸小得多,因此它的視野會被遮擋。 大光束還使激光雷達能夠檢測來自不同范圍的多個回波,并只處理信號最強的那個。這在惡劣的天氣條件下也會很有用,比如下雪時,激光雷達可以忽略雪花的反射所帶來的影響。沒有加入任何機器學習算法的相機,不能區分雪花,濕鏡頭或硬物體,最終返回一個扭曲的圖像。 激光雷達的曝光時間和快門速度(百萬分之一秒)也比相機(千分之一秒)要短,這意味著雨滴不會被檢測為跨越多個像素的條紋,而是原始形狀。
由于激光雷達是一種光學設備,其性能在大霧等條件下也會受到負面影響,但它仍能夠提供更多比相機等傳感器的有價值的數據,并且檢測的距離更遠,如上圖所示。
5、激光雷達傳感器很昂貴
曾經有一段時間,市場上唯一可用的激光雷達是旋轉式激光雷達,這種激光雷達非常昂貴,體積很大,無法大量生產。因此,人們對激光雷達及其高昂的價格仍有誤解是很自然的。但自從MEMS(微機電系統)激光雷達問世后,徹底改變了這一說法。MEMS組件是由硅制成的,很容易進行生產擴展,因此具有非常高的成本效益。 固態激光雷達采用標準組件,無需定期維護,因此成本降低。近年來,這些激光雷達傳感器的成本已經從幾千美元降到幾百美元,這種趨勢會在未來持續下去。事實上,中程傳感器在大批量生產時甚至可以以三位數的價格出售。
6、基于MEMS的激光雷達性能不高
盡管基于MEMS的激光雷達傳感器具有可量產、成本低等優點,但人們經常誤以為這些設備的探測范圍很小。這種說法源于MEMS微振鏡通常非常小(因此在MEMS中稱為“微型”)。一般來說,鏡子尺寸越大,接收面積越大,探測范圍越長。虹科開發了自己的MEMS微振鏡,其尺寸超過10mm,能將高比例的光子定向返回到光電探測器上。
虹科固態激光雷達傳感器借助同軸設計實現空間濾波,這意味著檢測器可以精確接收來自發射方向的光子。最小化背景光,實現高信噪比,從而增大探測范圍。
-
傳感器
+關注
關注
2548文章
50678瀏覽量
752008 -
激光雷達
+關注
關注
967文章
3939瀏覽量
189597 -
自動駕駛汽車
+關注
關注
4文章
376瀏覽量
40815
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論