 聊聊自動駕駛中高精度地圖的特點和面臨的問題
聊聊自動駕駛中高精度地圖的特點和面臨的問題
來到陌生的城市旅游,通過提前查看攻略準備去當地特色景點游玩,面對從未來過的城市,你很熟練地拿出手機,在導航App內輸入你想去的地點,導航App便立刻給你提供完善的出行建議,讓你可以根據需要進行選擇,并貼心地給你提供附近的停車點、用餐點、加油點、購物點等信息,讓你有需要時可以很快找到,而你也由于導航App的幫助,在陌生的城市完全可以放心游玩,這就是導航的常見用處所在。
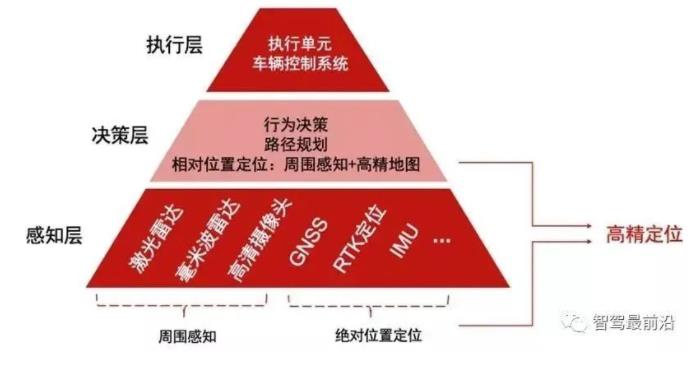
自動駕駛汽車概念的提出,讓汽車獨自完成行車任務成為了現實,自動駕駛主要是通過感知、決策和執行三個主要行為來實現。
感知就像人類通過眼睛和耳朵感知周圍情況,自動駕駛的感知是通過激光雷達、毫米波雷達、高清攝像頭等硬件設備的周圍感知及通過GNSS(全球導航衛星系統)、IMU(慣性測量單元)、RTK(實時動態)定位等絕對位置定位組成,用來搜集車輛周邊的環境。
決策就像是人類通過眼睛和耳朵接受到的信息,對下一步的動作做出預判,車輛的決策主要包含行為決策、路徑規劃和相對位置定位(周圍感知+高精度地圖),通過感知獲取的道路信息,對方向盤、加速踏板、制動踏板等決定車輛行為的設備進行決策控制。自動駕駛決策主要以感知信息數據為基礎,計算出經過優化的駕駛決策。
執行就像是人類行走時的手和腳,自動駕駛汽車基于決策層給出的駕駛決策,自動駕駛汽車的反向盤、加速踏板、制動踏板做出相對應的執行動作,從而確保自動駕駛車輛可以安全地完成自動駕駛任務。
高精度地圖特點
當使用自動駕駛汽車時,輸入預到達的目的地,自動駕駛汽車首先要做的就是道路的規劃和導航,就像我們在陌生城市旅游時,通過導航App來進行道路的選擇和規劃,但與導航App不同的是,導航App更注重的是街道名稱及路徑等信息,只記錄道路級別的數據:道路形狀、坡度、曲率、鋪設、方向等。自動駕駛車輛所需的是高精度地圖,高精度地圖不僅增加了車道屬性相關(車道線類型、車道寬度等)數據,更有諸如高架物體、防護欄、樹、道路邊緣類型、路邊地標等大量目標數據。高精度地圖能夠明確區分車道線類型、路邊地標等細節,給自動駕駛車輛在行駛過程中提供必要的信息提示。
此外,高精度地圖精度更高,不同于導航App米級導航,高精度地圖的精度要求達到厘米級(Google等高精度地圖精度在10-20厘米級別)。導航App的作用就是輔助導航,本質上與傳統的紙質地圖類似,而高精度地圖通過“高精度+高動態+多維度”數據,其目的是為自動駕駛提供自變量和目標函數的功能。
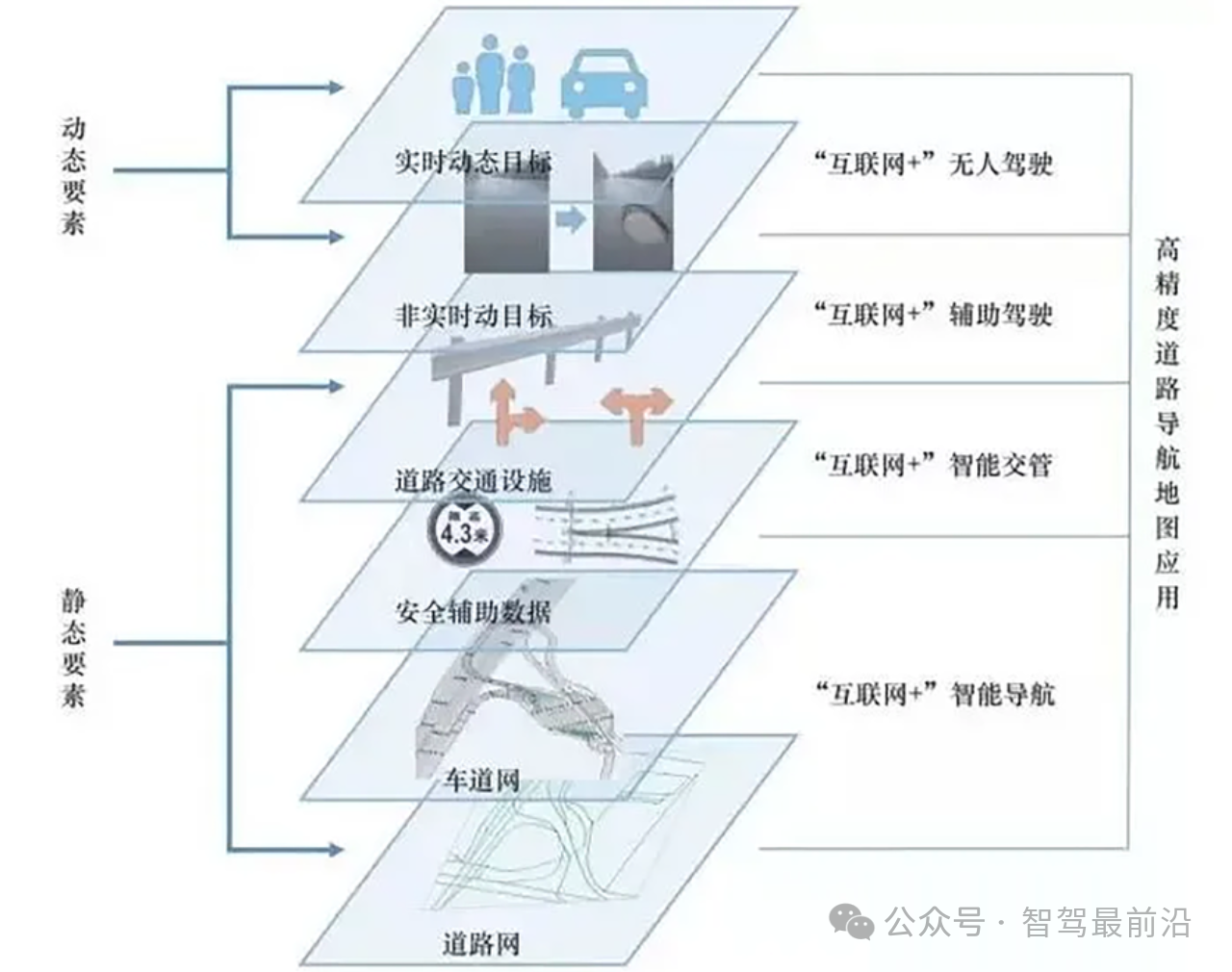
高精度地圖對數據的實時性要求更高。根據博世在2007年提出的定義,無人駕駛時代所需的局部動態地圖(Local Dynamic Map)根據更新頻率劃分可將所有數據劃分為四類:永久靜態數據(更新頻率約為1個月),半永久靜態數據(頻率為1小時),半動態數據(頻率為1分鐘),動態數據(頻率為1秒)。導航App可能只需要前兩者,而高精地圖為了應對各類突發狀況,保證自動駕駛的安全實現需要更多的半動態數據以及動態數據,這大大提升了對數據實時性的要求。精度地圖是高鮮度、高精度及高豐富度的集合,不論是動態化,還是精度和豐富度,其目的都是為了讓自動駕駛汽車能夠安全、高效行駛,動態化的高精度地圖可以保證自動駕駛汽車在行駛過程中及時、有效地面對突發狀況,并選擇最優的行駛路徑,讓自動駕駛汽車可以安全將乘客送達預定目的地。
高精度地圖的定義
高精度地圖通俗來講就是精度更高、數據維度更多的電子地圖。精度更高體現在精確到厘米級別,數據維度更多體現在其包括了除道路信息之外的與交通相關的周圍靜態信息。
高精度地圖將大量的行車輔助信息存儲為結構化數據,這些信息可以分為兩類。第一類是道路數據,比如車道線的位置、類型、寬度、坡度和曲率等車道信息。第二類是車道周邊的固定對象信息,比如交通標志、交通信號燈等信息、車道限高、下水道口、障礙物及其他道路細節,還包括高架物體、防護欄、數目、道路邊緣類型、路邊地標等基礎設施信息。
以上這些信息都有地理編碼,導航系統可以準確定位地形、物體和道路輪廓,從而引導自動駕駛車輛行駛。其中最重要的是對路網精確的三維表征(厘米級精度),比如路面的幾何結構、道路標示線的位置、周邊道路環境的點云模型等。有了這些高精度的三維表征,自動駕駛系統可以通過比對車載的GPS、IMU、LiDAR或攝像頭的數據精確確認自己當前的位置。另外,高精度地圖中包含有豐富的語義信息,比如交通信號燈的位置和類型、道路標示線的類型、以及哪些路面是可以行使等。
高精度地圖的重要性
高精度地圖除了在自動駕駛汽車行駛時提供導航作用外,還為自動駕駛汽車的安全行駛發揮了極大作用。
現在自動駕駛汽車行駛過程中的信息采集主要是通過激光雷達、毫米波雷達及車載攝像頭等對道路狀態進行信息采集,其中車道線的采集也是其中一個參考目標,但部分道路由于長期沒人維護,車道線就會磨損消失,自動駕駛汽車缺失了這一參考目標就及容易讓車輛的行駛偏離預定行駛車道,高精度地圖的輔助,就可以讓自動駕駛汽車保持在一個車道內行駛。
在雨雪、大霧等極端天氣下,硬件設備的信息采集也會出現一定程度的失效,為了保證自動駕駛汽車行駛過程中的安全性,高精度地圖就可以有效進行信息的補充,而且在復雜的道路環境下,僅僅依靠硬件設備的信息采集是無法分辨出紅綠燈信息及車道信息的,高精度地圖的出現就可以讓自動駕駛汽車獲得更多的道路信息,從而讓自動駕駛汽車實現動態的自動控制。
而且在一些如多層立交、隧道等復雜的道路場景下,為了能夠讓自動駕駛汽車安全地行駛,利用高精度地圖,結合視覺毫米波雷達、激光雷達等無源定位的無源傳感器,實現自主定位,這種融合定位的方式,會在實際使用過程中大大提高自動駕駛的安全性。
多變的道路狀況也是高精度地圖使用的必要原因之一,如部分城市為了有效改善交通環境,會設置潮汐車道等特殊的交通規則,還會對比分道路設置限速,此時就需要使用高精度地圖提前進行路徑規劃,讓自動駕駛汽車遵守交通規則。而且還可以借助高精度地圖提供的信息,對道路狀況進行預測,如在車道合并的路況下,高精度地圖就可以查詢到輔路入口或者車道線合并的情況,從而提前做出預判,高精度地圖也可以根據左右車道的虛實線情況,判斷旁邊車輛加塞的可能性。
高精度地圖面臨的問題
高精度地圖現階段還沒有統一的標準,都是各主車廠對各自的高精度地圖進行信息的采集,相互之間并無法共用,這就增加了各主車廠的采集成本。建立統一高精地圖的數據模型與交換格式,將有助于減少汽車制造商的開發時間和不必要的成本,同時保證未來跨品牌車輛使用的高清地圖都可以不斷共享刷新數據。
高精度地圖的采集成本較高,而且更新也比較慢,現在階段,高精度地圖采集測繪數據的方式主要有2大技術路線,一種以谷歌的地圖測繪車為代表,另一種則以特斯拉的“車隊學習網絡”(FleetLearning Network)為代表,相當于利用量產車,把測繪任務“眾包”出去,調動整個車隊的所有傳感器來收集數據,并通過云技術上傳到中央數據庫,最終每一輛車都是地圖數據貢獻者,也是獲得者。
自動駕駛的發展需要多種軟件、硬件技術的融合,也需要法律法規的建立,自動駕駛是汽車發展的趨勢,但也不是一蹴而就的。也歡迎大家關注智駕最前沿微信公眾號,智駕最前沿將繼續深耕自動駕駛領域技術,與大家聊聊關于自動駕駛發展的技術與趨勢,歡迎大家關注支持!
-
自動駕駛
+關注
關注
783文章
13687瀏覽量
166152 -
高精度地圖
+關注
關注
1文章
17瀏覽量
3035
發布評論請先 登錄
相關推薦
自動駕駛中常提的SLAM到底是個啥?

l4級別自動駕駛的特點是什么

聊聊自動駕駛離不開的感知硬件
自動駕駛無圖方案真的可行嗎?
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
拋棄高精度地圖舊模式,走向視覺感知新時代?
自動駕駛仿真測試實踐:高精地圖仿真

康謀技術 | 自動駕駛:揭秘高精度時間同步技術(二)

自動駕駛:揭秘高精度時間同步技術(一)

特斯拉與百度合作掃清自動駕駛關鍵障礙
自動駕駛發展問題及解決方案淺析
自動駕駛地圖研究:SD pro MAP快速上車,助力城市NOA輕地圖智駕方案






 工商網監
工商網監
評論