 GD32 RISC-V系列 BSP框架制作與移植
GD32 RISC-V系列 BSP框架制作與移植
手把手教你使用RT-Thread制作GD32 RISC-V系列BSP
熟悉RT-Thread的朋友都知道,RT-Thread提供了許多BSP,但不是所有的板子都能找到相應的BSP,這時就需要移植新的BSP。RT-Thread的所有BSP中,最完善的BSP就是STM32系列,但從2020年下半年開始,國內出現史無前例的芯片缺貨潮,芯片的交期和價格不斷拉升,STM32的價格也是水漲船高,很多朋友也在考慮使用國產替代,筆者使用的兆易創新的GD32系列,我看了下RT-Thread中GD系列BSP,都是玩家各自為政,每個人都是提交自己使用的板子的BSP,充斥著大量冗余的代碼,對于有強迫癥的我就非常不爽,就根據手頭的板子,參看STM32的BSP架構,構建了GD32的BSP架構。
目前筆者已經完成了ARM架構和RISC-V架構的移植,關于ARM架構的移植可以看我以前的文章,本文將要講解基于RISC-V架構的移植。
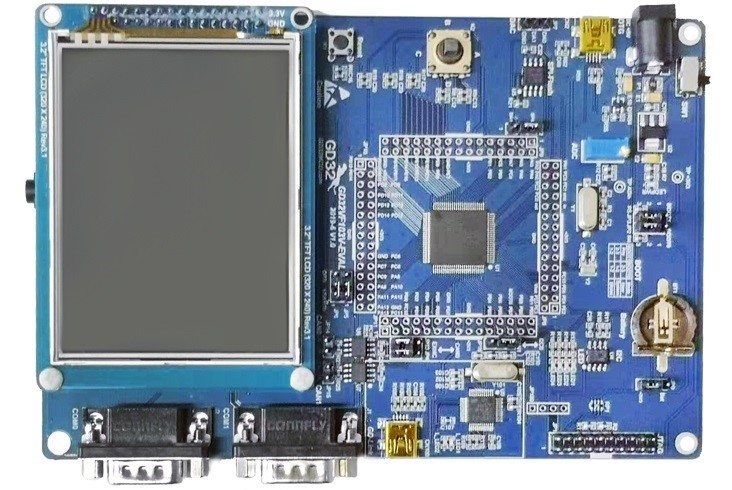
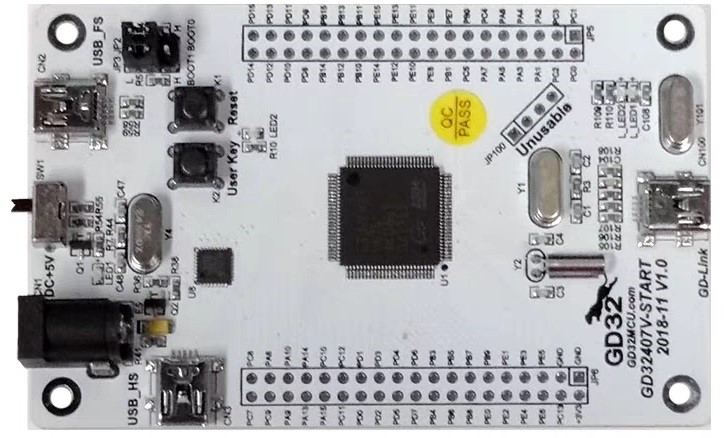
筆者使用的開發板是兆易創新設計的GD32VF103V-SEVAL開發板。其主控芯片為GD32VF103VB,主頻 108MHz,128KB FLASH,32KB RAM,資源還算豐富。
1 BSP框架制作
在具體移植GD32VF103V-SEVAL的BSP之前,先做好GD32 RISC-V系列的BSP架構。BSP框架結構如下圖所示:
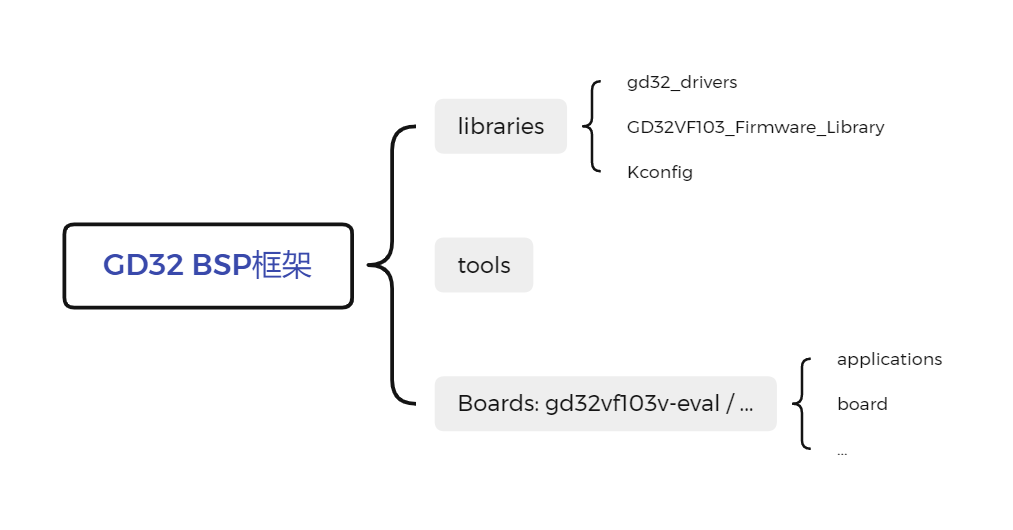
BSP架構主要分為三個部分:libraries、tools和具體的Boards,其中libraries包含了GD32的通用庫,包括每個系列的Firmware Library以及適配RT-Thread的drivers;tools是生成工程的Python腳本工具;另外就是Boards文件,當然這里的Boards有很多,我這里值列舉了GD32VF103V-SEVAL。
這里先談談libraries和tools的構建,然后在后文單獨討論具體板級BSP的制作。
1.1 Libraries構建
Libraries文件夾包含兆易創新提供的固件庫,這個直接在兆易創新的官網就可以下載。
下載地址:http://www.gd32mcu.com/cn/download/
然后將GD32VF103_Firmware_Library復制到libraries目錄下,其他的系列類似。

GD32VF103_Firmware_Library就是官方的文件,基本是不用大改,這里先在在文件夾中需要添加構建工程的腳本文件SConscript,其實也就是Python腳本。后面具體講解需要修改的地方。

SConscript文件的內容如下:
import rtconfig
from building import *
# get current directory
cwd = GetCurrentDir()
# The set of source files associated with this SConscript file.
cwd = GetCurrentDir()
src = Split('''
RISCV/env_Eclipse/handlers.c
RISCV/env_Eclipse/init.c
RISCV/env_Eclipse/your_printf.c
RISCV/drivers/n200_func.c
GD32VF103_standard_peripheral/system_gd32vf103.c
GD32VF103_standard_peripheral/Source/gd32vf103_gpio.c
GD32VF103_standard_peripheral/Source/gd32vf103_rcu.c
GD32VF103_standard_peripheral/Source/gd32vf103_exti.c
GD32VF103_standard_peripheral/Source/gd32vf103_eclic.c
''')
if GetDepend(['RT_USING_SERIAL']):
src += ['GD32VF103_standard_peripheral/Source/gd32vf103_usart.c']
if GetDepend(['RT_USING_I2C']):
src += ['GD32VF103_standard_peripheral/Source/gd32vf103_i2c.c']
if GetDepend(['RT_USING_SPI']):
src += ['GD32VF103_standard_peripheral/Source/gd32vf103_spi.c']
if GetDepend(['RT_USING_CAN']):
src += ['GD32VF103_standard_peripheral/Source/gd32vf103_can.c']
if GetDepend(['BSP_USING_ETH']):
src += ['GD32VF103_standard_peripheral/Source/gd32vf103_enet.c']
if GetDepend(['RT_USING_ADC']):
src += ['GD32VF103_standard_peripheral/Source/gd32vf103_adc.c']
if GetDepend(['RT_USING_DAC']):
src += ['GD32VF103_standard_peripheral/Source/gd32vf103_dac.c']
if GetDepend(['RT_USING_HWTIMER']):
src += ['GD32VF103_standard_peripheral/Source/gd32vf103_timer.c']
if GetDepend(['RT_USING_RTC']):
src += ['GD32VF103_standard_peripheral/Source/gd32vf103_rtc.c']
src += ['GD32VF103_standard_peripheral/Source/gd32vf103_pmu.c']
if GetDepend(['RT_USING_WDT']):
src += ['GD32VF103_standard_peripheral/Source/gd32vf103_wwdgt.c']
src += ['GD32VF103_standard_peripheral/Source/gd32vf103fwdgt.c']
path = [
cwd + '/RISCV/drivers',
cwd + '/GD32VF103_standard_peripheral',
cwd + '/GD32VF103_standard_peripheral/Include',]
group = DefineGroup('Libraries', src, depend = [''], CPPPATH = path)
Return('group')
該文件主要的作用就是添加庫文件和頭文件路徑,一部分文件是屬于基礎文件,因此直接調用Python庫的Split包含,另外一部分文件是根據實際的應用需求添加的。
這里是以GD32VF1來舉例的,其他系列的都是類似的。
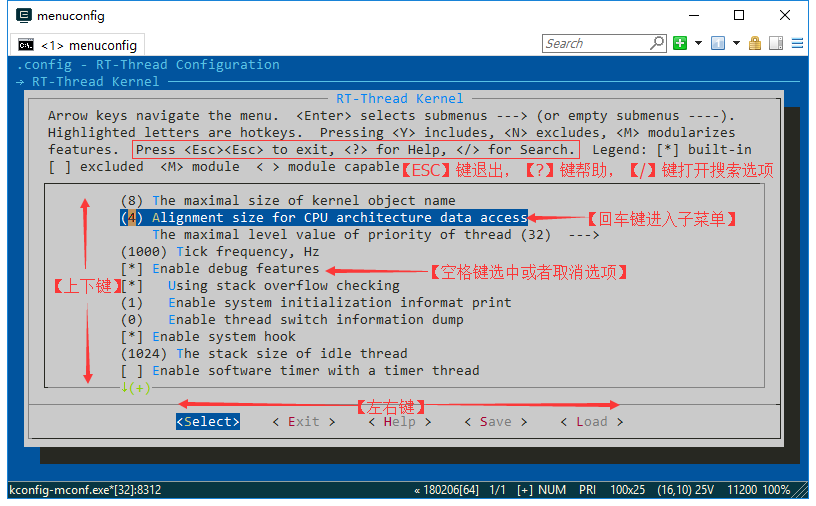
接下來說說Kconfig文件,這里是對內核和組件的功能進行配置,對RT-Thread的組件進行自由裁剪。
如果使用ENV環境,則在使用 menuconfig配置和裁剪 RT-Thread時體現。
后面所有的Kconfig文件都是一樣的邏輯。下表列舉一些常用的Kconfig句法規則。
| 關鍵詞 | 說明 |
| config | 此關鍵字定義了一新的配置選項 |
| menuconfig | 此關鍵字和前面的關鍵字很相似,但它在前面的基礎上要求所有的子選項作為獨立的行顯示。 |
| choice/endchoice | 該關鍵字定義了一組選擇項。 |
| comment | 這里定義了在配置過程中顯示給用戶的注釋,該注釋還將寫進輸出文件中。格式說明: comment "eg: description content" |
| menu / endmenu | 這里定義了一個菜單,所有依賴于此菜單的選項都是它的子選項。 |
| if/endif | 這里定義了if結構。 |
| source | 讀取其他具體的配置文件,其他配置文件會被解析。 |
Kconfig的語法規則網上資料很多,自行去學習吧。
bsp/gd32/risc-v/libraries/Kconfig內容如下:
config SOC_FAMILY_GD32
bool
config SOC_GD32VF103V
bool
select SOC_SERIES_GD32VF103V
select SOC_FAMILY_GD32
最后談談gd32_drivers,這個文件夾就是GD32的外設驅動文件夾,為上層應用提供調用接口。
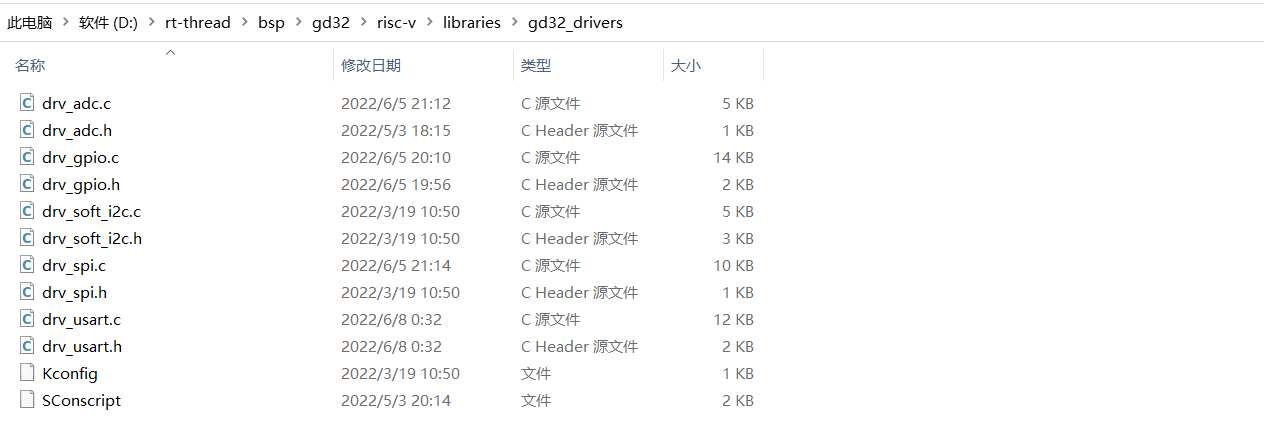
該文件夾是整個GD32共用的,因此在編寫和修改都要慎重。關于drv_xxx文件在后句具體移植BSP的時候講解,這里主要將整體架構,SConscript和Kconfig的作用和前面的一樣,只是具體的內容不同罷了。
好了,先看bsp/gd32/risc-v/libraries/gd32_drivers/SConscript文件。
Import('RTT_ROOT')
Import('rtconfig')
from building import *
cwd = GetCurrentDir()
# add the general drivers.
src = Split("""
""")
# add pin drivers.
if GetDepend('RT_USING_PIN'):
src += ['drv_gpio.c']
# add usart drivers.
if GetDepend(['RT_USING_SERIAL']):
src += ['drv_usart.c']
# add i2c drivers.
if GetDepend(['RT_USING_I2C', 'RT_USING_I2C_BITOPS']):
if GetDepend('BSP_USING_I2C0') or GetDepend('BSP_USING_I2C1') or GetDepend('BSP_USING_I2C2') or GetDepend('BSP_USING_I2C3'):
src += ['drv_soft_i2c.c']
# add spi drivers.
if GetDepend('RT_USING_SPI'):
src += ['drv_spi.c']
# add spi flash drivers.
if GetDepend('RT_USING_SFUD'):
src += ['drv_spi_flash.c', 'drv_spi.c']
# add wdt drivers.
if GetDepend('RT_USING_WDT'):
src += ['drv_wdt.c']
# add rtc drivers.
if GetDepend('RT_USING_RTC'):
src += ['drv_rtc.c']
# add timer drivers.
if GetDepend('RT_USING_HWTIMER'):
src += ['drv_hwtimer.c']
# add adc drivers.
if GetDepend('RT_USING_ADC'):
src += ['drv_adc.c']
path = [cwd]
group = DefineGroup('Drivers', src, depend = [''], CPPPATH = path)
Return('group')
和GD32VF103_Firmware_Library文件夾中的SConscript是類似的。
bsp/gd32/risc-v/libraries/gd32_drivers/Kconfig文件結構如下:
if BSP_USING_USBD
config BSP_USBD_TYPE_FS
bool
# "USB Full Speed (FS) Core"
endif
1.2 Tools構建
該文件夾就是工程構建的腳本,
import os
import sys
import shutil
cwd_path = os.getcwd()
sys.path.append(os.path.join(os.path.dirname(cwd_path), 'rt-thread', 'tools'))
def bsp_update_board_kconfig(dist_dir):
# change board/kconfig path
if not os.path.isfile(os.path.join(dist_dir, 'board/Kconfig')):
return
with open(os.path.join(dist_dir, 'board/Kconfig'), 'r') as f:
data = f.readlines()
with open(os.path.join(dist_dir, 'board/Kconfig'), 'w') as f:
for line in data:
if line.find('../libraries/gd32_drivers/Kconfig') != -1:
position = line.find('../libraries/gd32_drivers/Kconfig')
line = line[0:position] + 'libraries/gd32_drivers/Kconfig"\n'
f.write(line)
# BSP dist function
def dist_do_building(BSP_ROOT, dist_dir):
from mkdist import bsp_copy_files
import rtconfig
print("=> copy gd32 bsp library")
library_dir = os.path.join(dist_dir, 'libraries')
library_path = os.path.join(os.path.dirname(BSP_ROOT), 'libraries')
bsp_copy_files(os.path.join(library_path, rtconfig.BSP_LIBRARY_TYPE),
os.path.join(library_dir, rtconfig.BSP_LIBRARY_TYPE))
print("=> copy bsp drivers")
bsp_copy_files(os.path.join(library_path, 'gd32_drivers'), os.path.join(library_dir, 'gd32_drivers'))
shutil.copyfile(os.path.join(library_path, 'Kconfig'), os.path.join(library_dir, 'Kconfig'))
bsp_update_board_kconfig(dist_dir)
以上代碼很簡單,主要使用了Python的OS模塊的join函數,該函數的作用就是連接兩個或更多的路徑名。最后將BSP依賴的文件復制到指定目錄下。
在使用scons --dist命令打包的時候,就是依賴的該腳本,生成的dist文件夾的工程到任何目錄下使用,也就是將BSP相關的庫以及內核文件提取出來,可以將該工程任意拷貝。
需要注意的是,使用scons --dist打包后需要修改board/Kconfig中的庫路徑,因此這里調用了bsp_update_board_kconfig方法修改。
1.3 gd32vf103v-eval構建
該文件夾就gd32vf103v-eval的具體BSP文件,文件結構如下:

在后面將具體講解如何構建該部分內容。
2 BSP移植
2.1GCC環境準備
RISC-V系列MCU使用的工具鏈是xPack GNU RISC-V Embedded GCC。
在配置交叉編譯工具鏈之前,需要下載得到GCC工具鏈的安裝包,然后解壓即可,也可配置環境變量。
GCC工具鏈下載地址:https://github.com/xpack-dev-tools/riscv-none-embed-gcc-xpack/releases/
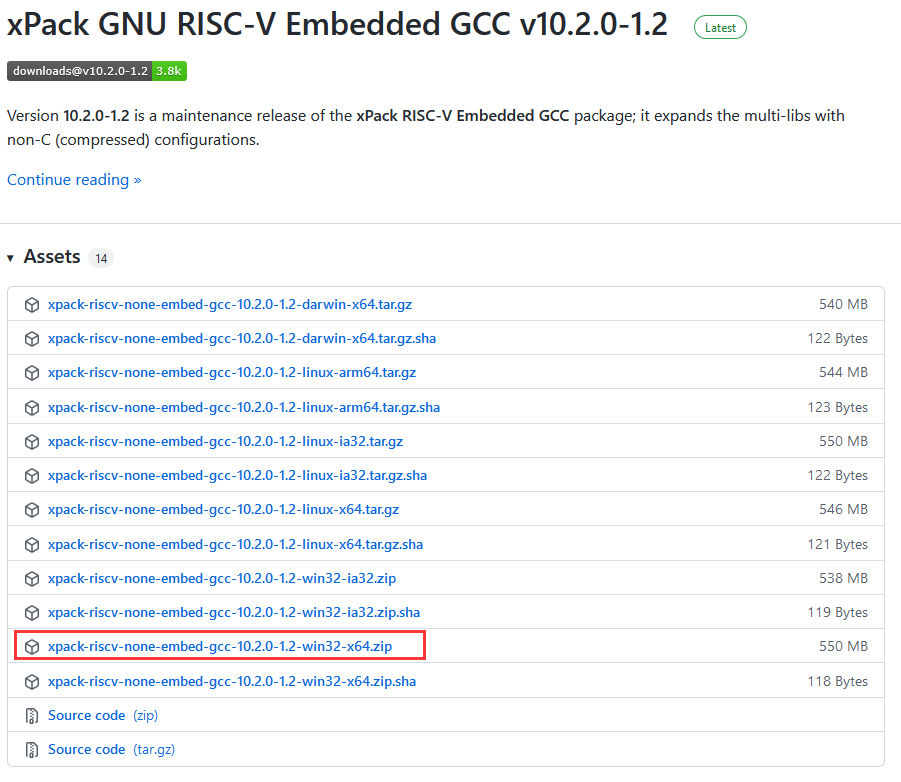
根據自己的主機選擇相應的版本,下載完成解壓即可。
2.2 BSP工程制作
1.構建基礎工程
首先看看RT-Thread代碼倉庫中已有很多BSP,而我要移植的是RISC-V內核。這里參考GD32 ARM工程。最終目錄如下:
risc-v
docs #說明文檔
gd32vf103v-eval #具體BSP
libraries #庫文件
gd32_drivers
GD32VF103_Firmware_Library # GD官方固件庫
tools
OpenOCD # OpenOCD下載調試工具
README.md
2.修改BSP構建腳本
bsp/gd32/risc-v/gd32vf103v-eval/SConstruct修改后的內容如下:
import os
import sys
import rtconfig
if os.getenv('RTT_ROOT'):
RTT_ROOT = os.getenv('RTT_ROOT')
else:
RTT_ROOT = os.path.normpath(os.getcwd() + '/../../../..')
sys.path = sys.path + [os.path.join(RTT_ROOT, 'tools')]
try:
from building import *
except:
print('Cannot found RT-Thread root directory, please check RTT_ROOT')
print(RTT_ROOT)
exit(-1)
TARGET = 'rtthread.' + rtconfig.TARGET_EXT
DefaultEnvironment(tools=[])
env = Environment(tools = ['mingw'],
AS = rtconfig.AS, ASFLAGS = rtconfig.AFLAGS,
CC = rtconfig.CC, CCFLAGS = rtconfig.CFLAGS,
AR = rtconfig.AR, ARFLAGS = '-rc',
CXX = rtconfig.CXX, CXXFLAGS = rtconfig.CXXFLAGS,
LINK = rtconfig.LINK, LINKFLAGS = rtconfig.LFLAGS)
env.PrependENVPath('PATH', rtconfig.EXEC_PATH)
env['ASCOM'] = env['ASPPCOM']
Export('RTT_ROOT')
Export('rtconfig')
SDK_ROOT = os.path.abspath('./')
if os.path.exists(SDK_ROOT + '/libraries'):
libraries_path_prefix = SDK_ROOT + '/libraries'
else:
libraries_path_prefix = os.path.dirname(SDK_ROOT) + '/libraries'
SDK_LIB = libraries_path_prefix
Export('SDK_LIB')
# prepare building environment
# objs = PrepareBuilding(env, RTT_ROOT, has_libcpu=False)
objs = PrepareBuilding(env, RTT_ROOT)
gd32_library = 'GD32VF103_Firmware_Library'
rtconfig.BSP_LIBRARY_TYPE = gd32_library
# include libraries
objs.extend(SConscript(os.path.join(libraries_path_prefix, gd32_library, 'SConscript')))
# include drivers
objs.extend(SConscript(os.path.join(libraries_path_prefix, 'gd32_drivers', 'SConscript')))
# make a building
DoBuilding(TARGET, objs)
該文件用于鏈接所有的依賴文件,并調用make進行編譯。該文件主要修改固件庫的路徑。
bsp/gd32/risc-v/gd32vf103v-eval/rtconfig.py修改后的內容如下:
import os
# toolchains options
ARCH='risc-v'
CPU='bumblebee'
CROSS_TOOL='gcc'
# bsp lib config
BSP_LIBRARY_TYPE = None
if os.getenv('RTT_CC'):
CROSS_TOOL = os.getenv('RTT_CC')
if os.getenv('RTT_ROOT'):
RTT_ROOT = os.getenv('RTT_ROOT')
# cross_tool provides the cross compiler
# EXEC_PATH is the compiler execute path, for example, CodeSourcery, Keil MDK, IAR
if CROSS_TOOL == 'gcc':
PLATFORM = 'gcc'
EXEC_PATH = EXEC_PATH = r'D:/gcc/xpack-riscv-none-embed-gcc-10.2.0-1.2/bin'
else:
print('Please make sure your toolchains is GNU GCC!')
exit(0)
#if os.getenv('RTT_EXEC_PATH'):
# EXEC_PATH = os.getenv('RTT_EXEC_PATH')
CORE = 'risc-v'
BUILD = 'debug'
MAP_FILE = 'rtthread.map'
LINK_FILE = '../libraries/GD32VF103_Firmware_Library/RISCV/env_Eclipse/GD32VF103xB.lds'
if PLATFORM == 'gcc':
# toolchains
PREFIX = 'riscv-none-embed-'
CC = PREFIX + 'gcc'
AS = PREFIX + 'gcc'
AR = PREFIX + 'ar'
CXX = PREFIX + 'g++'
LINK = PREFIX + 'gcc'
TARGET_EXT = 'elf'
SIZE = PREFIX + 'size'
OBJDUMP = PREFIX + 'objdump'
OBJCPY = PREFIX + 'objcopy'
DEVICE = ' -march=rv32imac -mabi=ilp32 -DUSE_PLIC -DUSE_M_TIME -DNO_INIT -mcmodel=medany -msmall-data-limit=8 -L. -nostartfiles-lc '
CFLAGS = DEVICE
CFLAGS += ' -save-temps=obj'
AFLAGS = '-c'+ DEVICE + ' -x assembler-with-cpp'
AFLAGS += ' -Iplatform -Ilibraries/RISCV/include -Ilibraries/RISCV/env_Eclipse'
LFLAGS = DEVICE
LFLAGS += ' -Wl,--gc-sections,-cref,-Map=' + MAP_FILE
LFLAGS += ' -T ' + LINK_FILE
LFLAGS += ' -Wl,-wrap=memset'
CPATH = ''
LPATH = ''
if BUILD == 'debug':
CFLAGS += ' -O0 -g3'
AFLAGS += ' -g3'
else:
CFLAGS += ' -O2'
CXXFLAGS = CFLAGS
POST_ACTION = OBJCPY + ' -O binary $TARGET rtthread.bin\n' + SIZE + ' $TARGET \n'
def dist_handle(BSP_ROOT, dist_dir):
import sys
cwd_path = os.getcwd()
sys.path.append(os.path.join(os.path.dirname(BSP_ROOT), 'tools'))
from sdk_dist import dist_do_building
dist_do_building(BSP_ROOT, dist_dir)
該文件編譯參數,主要關注鏈接腳本和交叉編譯工具鏈,工具鏈的地址需要根據實際的地址修改,gd32vf103v-eval開發板使用的芯片是GD32VF103VB,因此其鏈接腳本是GD32VF103xB.lds。
3.修改board文件夾
(1)修改bsp/gd32/risc-v/gd32vf103v-eval/board/Kconfig文件
修改后內容如下:
menu "Hardware Drivers Config"
config SOC_SERIES_GD32VF103V
bool
default y
config SOC_GD32VF103V
bool
select SOC_SERIES_GD32VF103V
select RT_USING_COMPONENTS_INIT
select RT_USING_USER_MAIN
default y
menu "Onboard Peripheral Drivers"
endmenu
menu "On-chip Peripheral Drivers"
config BSP_USING_GPIO
bool "Enable GPIO"
select RT_USING_PIN
default y
menuconfig BSP_USING_UART
bool "Enable UART"
default y
select RT_USING_SERIAL
if BSP_USING_UART
config BSP_USING_UART0
bool "Enable UART0"
default y
config BSP_UART0_RX_USING_DMA
bool "Enable UART0 RX DMA"
depends on BSP_USING_UART0
select RT_SERIAL_USING_DMA
default n
config BSP_USING_UART1
bool "Enable UART1"
default n
config BSP_UART1_RX_USING_DMA
bool "Enable UART1 RX DMA"
depends on BSP_USING_UART1
select RT_SERIAL_USING_DMA
default n
config BSP_USING_UART2
bool "Enable UART2"
default n
config BSP_UART2_RX_USING_DMA
bool "Enable UART2 RX DMA"
depends on BSP_USING_UART2
select RT_SERIAL_USING_DMA
default n
config BSP_USING_UART3
bool "Enable UART3"
default n
config BSP_UART3_RX_USING_DMA
bool "Enable UART3 RX DMA"
depends on BSP_USING_UART3
select RT_SERIAL_USING_DMA
default n
config BSP_USING_UART4
bool "Enable UART4"
default n
config BSP_UART4_RX_USING_DMA
bool "Enable UART4 RX DMA"
depends on BSP_USING_UART4
select RT_SERIAL_USING_DMA
default n
endif
menuconfig BSP_USING_SPI
bool "Enable SPI BUS"
default n
select RT_USING_SPI
if BSP_USING_SPI
config BSP_USING_SPI1
bool "Enable SPI1 BUS"
default n
config BSP_SPI1_TX_USING_DMA
bool "Enable SPI1 TX DMA"
depends on BSP_USING_SPI1
default n
config BSP_SPI1_RX_USING_DMA
bool "Enable SPI1 RX DMA"
depends on BSP_USING_SPI1
select BSP_SPI1_TX_USING_DMA
default n
endif
menuconfig BSP_USING_I2C1
bool "Enable I2C1 BUS (software simulation)"
default n
select RT_USING_I2C
select RT_USING_I2C_BITOPS
select RT_USING_PIN
if BSP_USING_I2C1
config BSP_I2C1_SCL_PIN
int "i2c1 scl pin number"
range 1 216
default 24
config BSP_I2C1_SDA_PIN
int "I2C1 sda pin number"
range 1 216
default 25
endif
menuconfig BSP_USING_ADC
bool "Enable ADC"
default n
select RT_USING_ADC
if BSP_USING_ADC
config BSP_USING_ADC0
bool "Enable ADC0"
default n
config BSP_USING_ADC1
bool "Enable ADC1"
default n
endif
menuconfig BSP_USING_TIM
bool "Enable timer"
default n
select RT_USING_HWTIMER
if BSP_USING_TIM
config BSP_USING_TIM10
bool "Enable TIM10"
default n
config BSP_USING_TIM11
bool "Enable TIM11"
default n
config BSP_USING_TIM12
bool "Enable TIM13"
default n
endif
menuconfig BSP_USING_ONCHIP_RTC
bool "Enable RTC"
select RT_USING_RTC
default n
if BSP_USING_ONCHIP_RTC
choice
prompt "Select clock source"
default BSP_RTC_USING_LSE
config BSP_RTC_USING_LSE
bool "RTC USING LSE"
config BSP_RTC_USING_LSI
bool "RTC USING LSI"
endchoice
endif
config BSP_USING_WDT
bool "Enable Watchdog Timer"
select RT_USING_WDT
default n
source "../libraries/gd32_drivers/Kconfig"
endmenu
menu "Board extended module Drivers"
endmenu
endmenu
這個文件就是配置板子驅動的,這里可根據實際需求添加。
(2)修改bsp/gd32/risc-v/gd32vf103v-eval/board/SConscript文件
修改后內容如下:
import os
import rtconfig
from building import *
Import('SDK_LIB')
cwd = GetCurrentDir()
# add general drivers
src = Split('''
board.c
''')
path = [cwd]
startup_path_prefix = SDK_LIB
if rtconfig.CROSS_TOOL == 'gcc':
src += [startup_path_prefix + '/GD32VF103_Firmware_Library/RISCV/env_Eclipse/start.S']
src += [startup_path_prefix + '/GD32VF103_Firmware_Library/RISCV/env_Eclipse/entry.S']
CPPDEFINES = ['GD32VF103V_EVAL']
group = DefineGroup('Drivers', src, depend = [''], CPPPATH = path, CPPDEFINES = CPPDEFINES)
Return('group')
該文件主要添加board文件夾的.c文件和頭文件路徑。另外根據開發環境選擇相應的匯編文件,和前面的libraries的SConscript語法是一樣,文件的結構都是類似的,這里就沒有注釋了。
到這里,基本所有的依賴腳本都配置完成了。
4.固件庫修改
(1)修改bsp/gd32/risc-v/libraries/GD32VF103_Firmware_Library/RISCV/env_Eclipse/start.S
GCC環境下的啟動是由 entry()函數調用的啟動函數 rt_thread_startup(),所以需要修改啟動文的C語言入口。

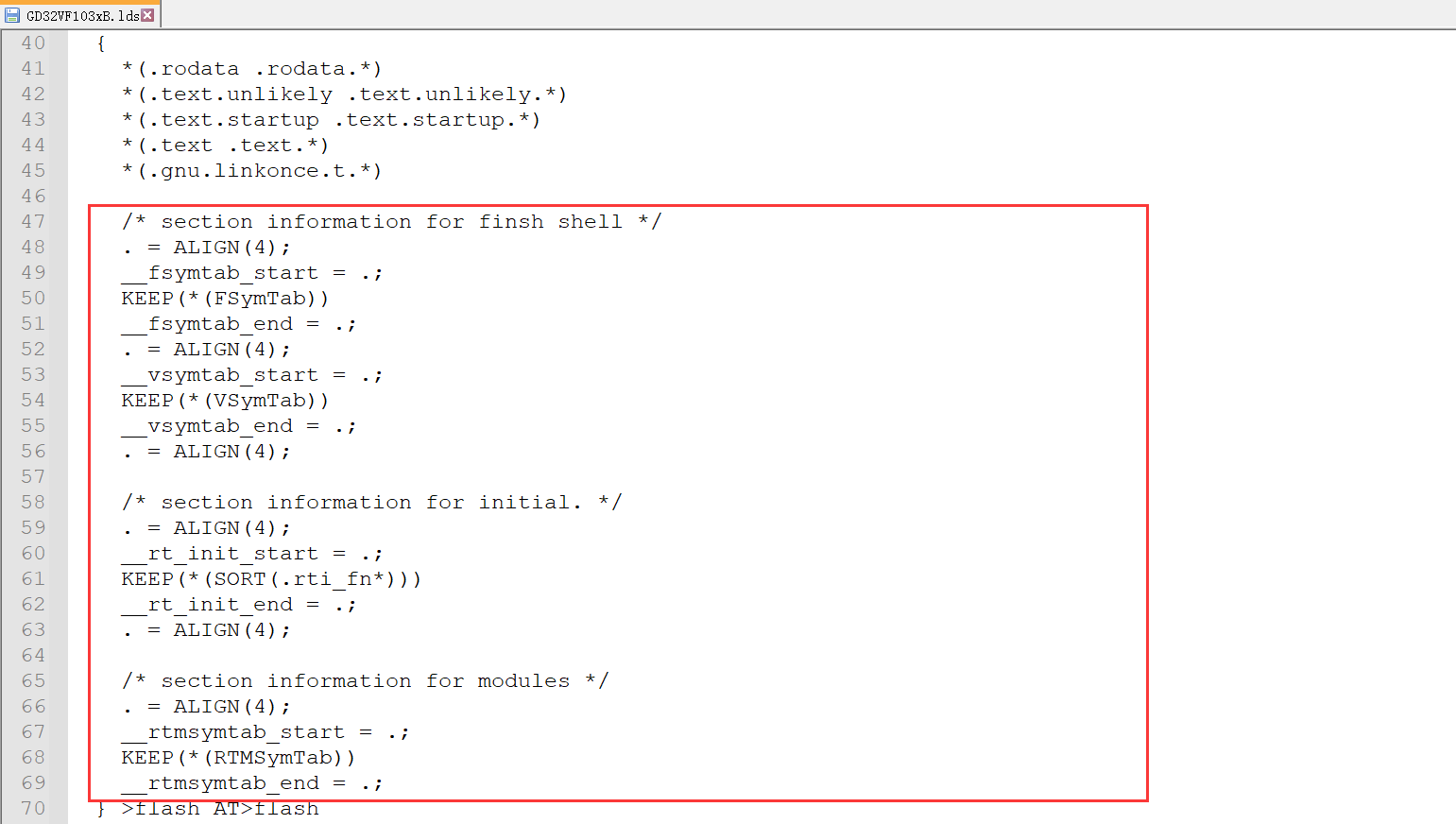
(2)修改bsp/gd32/risc-v/libraries/GD32VF103_Firmware_Library/RISCV/env_Eclipse/GD32VF103xB.lds
GD32VF103xB.lds文件需要新增RT-Thread堆棧的位置,否則無法正常運轉,新增代碼如下:
/* section information for finsh shell */
. = ALIGN(4);
__fsymtab_start = .;
KEEP(*(FSymTab))
__fsymtab_end = .;
. = ALIGN(4);
__vsymtab_start = .;
KEEP(*(VSymTab))
__vsymtab_end = .;
. = ALIGN(4);
/* section information for initial. */
. = ALIGN(4);
__rt_init_start = .;
KEEP(*(SORT(.rti_fn*)))
__rt_init_end = .;
. = ALIGN(4);
/* section information for modules */
. = ALIGN(4);
__rtmsymtab_start = .;
KEEP(*(RTMSymTab))
__rtmsymtab_end = .;
5.驅動修改
一個基本的BSP中,串口是必不可少的,所以還需要編寫串口驅動,這里使用的串口0作為調試串口。
板子上還有LED燈,主要編寫GPIO驅動即可。
關于串口和LED的驅動可以查看源碼,這里就不貼出來了。
6.應用開發
筆者在applications的main.c中添加LED的應用代碼,
#include
#include
#include
#include
/* defined the LED1 pin: PC0 */
#define LED1_PIN GET_PIN(C, 0)
int main(void)
{
int count = 1;
/* set LED1 pin mode to output */
rt_pin_mode(LED1_PIN, PIN_MODE_OUTPUT);
while (count++)
{
rt_pin_write(LED1_PIN, PIN_HIGH);
rt_thread_mdelay(500);
rt_pin_write(LED1_PIN, PIN_LOW);
rt_thread_mdelay(500);
}
return RT_EOK;
}
當然,這需要GPIO驅動的支持。
7.使用ENV編譯工程
在env中執行:scons

編譯成功打印信息如下:

8.使用VS Code開發GD32
在env中執行:scons --target=vsc

這樣就可方便使用VSCode開發GD32了,當然,這里只是生成了c_cpp_properties.json,要想使用VS Code下載代碼還需要更多的配置,下一節講解。
2.3固件下載
前面使用ENV成功編譯GD32VF103V-SEVAL的固件,那么接下來就是下載環節,下載方式很多,筆者這里講解使用OpenOCD下載。
OpenOCD是用于對RISC-V進行下載仿真的軟件工具,是一個開源軟件包。當然啦,要想使用OpenOCD下載固件,需要GD-Link或者J-Link的支持。OpenOCD軟件包已經放在bsp/gd32/risc-v/tools,只需要簡單配置就可以,筆者這里使用VS Code開發。
1.新建bsp/gd32/risc-v/gd32vf103v-eval/.vscode/tasks.json
tasks.json的作用就是配置工程的編譯、下載等工作。如果沒有則需要創建tasks.json文件,內容如下:
{
"version":"2.0.0",
"tasks": [
{
"label":"download",
"type":"shell",
"command":"../tools/OpenOCD/bin/openocd.exe",
"args": [
"-f",
"../tools/interface/openocd_gdlink_riscv.cfg",
"-c",
"program rtthread.elf exit"
]
}
]
}
這個文件創建了一個任務,任務名為download,用于在線下載固件。
選擇“終端->運行任務…”

選擇task中配置的命令download。

稍等片刻,即可下載成功。
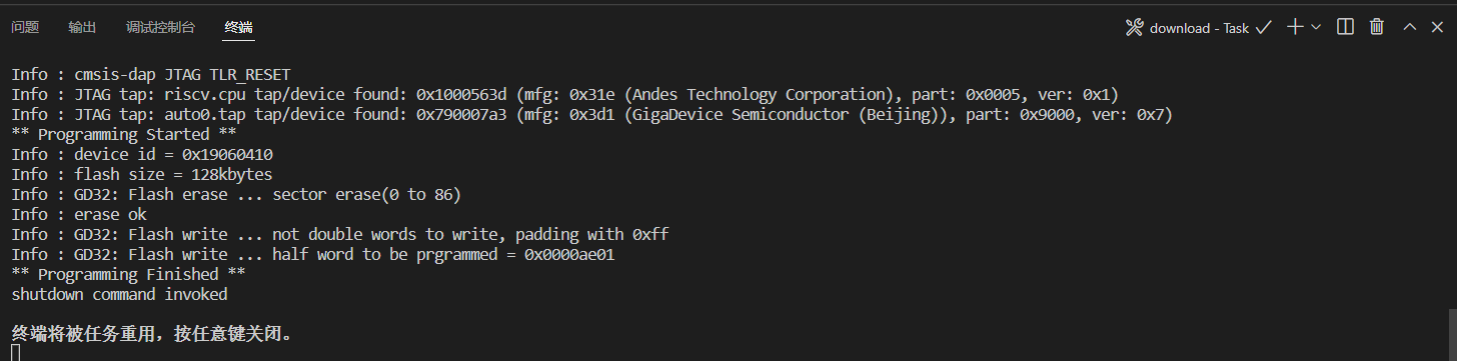
固件下載成后,接上串口0,打印信息如下:

同時LED會不斷閃爍。
【BUG修復】
老版本的固件庫在啟動文件中清除中斷,復位時會打印兩次版本信息,如下所示:

新版本的固件庫不會出現該問題,因此建議大家使用筆者筆者提供的代碼,筆者的代碼是最新的固件庫,而且驅動更加完善。
關于GD32 RISC-V系列的BSP的移植就到這里了,當然還有很多內容,這里只是拋磚引玉。最后希望更多的朋友加入進來,為國產RTOS貢獻自己的力量吧。
GD32 BSP地址:https://gitee.com/ouxiaolong/GD32_RT-Thread
-
RTOS
+關注
關注
21文章
809瀏覽量
119431 -
BSP
+關注
關注
1文章
86瀏覽量
26108 -
RT-Thread
+關注
關注
31文章
1272瀏覽量
39919 -
GD32
+關注
關注
7文章
403瀏覽量
24218 -
RISC-V
+關注
關注
44文章
2228瀏覽量
46026
發布評論請先 登錄
相關推薦
GD32407V-START開發板的BSP框架制作與移植
RISC-V 跑大模型(二):LLaMA零基礎移植教程

擁抱RISC-V的開發世界 兆易創新推GD32VF103系列RISC-V MCU
如何移植RT-ThreadNano到RISC-V架構?
GD32單片機簡析
移植RISC-V CH32V103R BSP的教程
賽昉科技成立RISC-V Multimedia SIG,推動openKylin on RISC-V生態發展
如何進行GD32F103系列的BSP制作
Ashling為兆易創新GD32 RISC-V MCU提供高效RiscFree? C/C++工具鏈
AN067 GD32RISC-V MCU Windows系統下Eclipse開發教程







 工商網監
工商網監
評論