 NCAP雷達要求更新了,ADAS工程師需了解的部分
NCAP雷達要求更新了,ADAS工程師需了解的部分
歐洲新車安全評鑒協會(NCAP)近期更新了其雷達標準,以便在新車中改善駕駛輔助功能。
NCAP標準因地區而異;在美國,NCAP由國家公路交通安全管理局(又稱為NHTSA)管理,而全球NCAP則是一個集中型組織。但是,所有組織都有著共同的目標:設定標準來提高汽車和駕駛安全性。這些組織提供0-5星的評級來幫助消費者在購買新車時做出明智決策。
很多情況下,Euro NCAP都率先設定標準,進而推動全球汽車行業的發展。最新的第79號條例指定了雷達在盲點檢測和車道變換輔助中的最小距離和最低運行速度。
針對雷達,“最小距離和最低運行速度”一節(5.6.4.8節)可方便您查找車輛最低運行速度(Vsmin)(ACSF C類功能允許用于執行車道變換的最低速度)以及雷達支持的最小距離(Srear)。
換言之,可幫助確定盲點檢測雷達傳感器在20km/h的最低運行速度(按ACSF C類功能要求啟動LCM)下應檢測到的距離。
提高車道變換安全性
安全的車道變換可以讓正在靠近的車輛有足夠的時間做出反應(減速),從而確保車輛間始終可以保持安全的行駛距離。具體來說,R79條例(見第5.6.4.7部分)進行了如下定義:如果車道變換開始0.4秒后,發現目標車道上正在靠近的車輛必須以高于3m/s2的加速度進行減速,才能確保兩車輛間距不會小于自主車輛1秒鐘內行駛的距離,則自主車輛的此次車道變換定義為臨界狀態。
知道正在靠近車輛的距離和速度以及自主車輛的速度,那么在變換車道之初即可計算兩車輛之間的臨界距離Scritical(第5.6.4.7.1部分)。如果在開始變換車道時兩車輛之間的距離小于Scritical,則不允許車道變換。圖1顯示了Scritical和自主車輛速度之間的函數關系。請注意,自主車輛的運行速度為20kmph時,臨界距離接近180m。
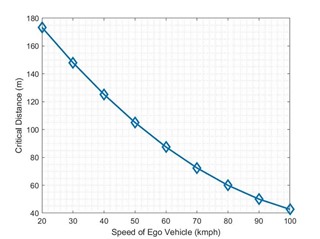
圖1:進行安全車道變換所需的臨界距離和速度關系圖
因此,檢測正在靠近的車輛并估算其距離是進行高效車道變換的關鍵。如條例的第5.6.4.8部分所述,每個制造商都必須聲明其車輛可以可靠檢測到相鄰車道后方來車的最小距離(Srear)(條例要求使用兩輪車測試Srear)。基于聲明的Srear,此條例還定義了最低運行速度(Vsmin),即針對自主車輛可以進行車道變換計算出最低速度。圖2中,根據正在靠近車輛的Srear距離,其最低運行速度為130kmph。

圖2:NCAP條例中的速度和距離關系圖(圖片來源:聯合國第79號條例)
針對自主車輛無法檢測到相鄰車道上正在靠近車輛的情況,該條例做出了最壞的假設,即在Srear距離處有未檢測到的正在靠近車輛,且此車輛速度為130kmph。在這種情況下,不允許以低于Vsmin的速度進行車道變換。但是,假設自主車輛檢測到正在靠近的目標車輛距離其小于Srear,則可以低于Vsmin的速度進行車道變換。前提是這種情況并不視為臨界狀態,即正在靠近的車輛和自主車輛之間的距離大于Scritical(如第5.6.4.7.1部分所述)。
TI的AWR2944是首款單芯片角雷達傳感器,可幫助汽車制造商滿足上述NCAP安全要求。該傳感器提供了卓越的角雷達檢測性能,并且集成4個發送器,可提供出色的射頻性能,比傳統3發送器器件的角分辨率高33%。以下是部分用例情況下的測試結果:
采用適用于角雷達的TI毫米波雷達傳感器來滿足NCAP要求
汽車配備檢測距離更遠的高分辨率雷達后,可在更遠距離更快地檢測到迎面駛來的車輛,從而更安全地變換車道和通過十字路口。TI的角雷達可幫助汽車制造商滿足最新的NCAP安全要求,在全球范圍內打造更安全的駕駛體驗。
其他資源:
AWR2944產品文件夾
高端角雷達參考設計
購買AWR2944評估板
訂購AWR2944器件樣片
該文章由Adeel Ahmad、Jitendra Gupta、Sandeep Rao和Bhavin Kharadi共同編寫。
關于德州儀器(TI)
德州儀器(TI)(納斯達克股票代碼:TXN)是一家全球性的半導體公司,致力于設計、制造、測試和銷售模擬和嵌入式處理芯片,用于工業、汽車、個人電子產品、通信設備和企業系統等市場。我們致力于通過半導體技術讓電子產品更經濟實用,創造一個更美好的世界。如今,每一代創新都建立在上一代創新的基礎之上,使我們的技術變得更小巧、更快速、更可靠、更實惠,從而實現半導體在電子產品領域的廣泛應用,這就是工程的進步。這正是我們數十年來乃至現在一直在做的事。
商標
所有注冊商標和其它商標均歸其各自所有者專屬。
審核編輯 黃昊宇
-
嵌入式處理
+關注
關注
0文章
341瀏覽量
9997 -
雷達
+關注
關注
50文章
2901瀏覽量
117330 -
adas
+關注
關注
309文章
2168瀏覽量
208524
發布評論請先 登錄
相關推薦
愛普生晶體在車載系統應用案例-ADAS系統的部分應用


FPGA算法工程師、邏輯工程師、原型驗證工程師有什么區別?


嵌入式軟件工程師和硬件工程師的區別?







 工商網監
工商網監
評論