") 機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)應(yīng)用例程|如何去實(shí)現(xiàn)膠圈內(nèi)嵌完整性檢測
機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)應(yīng)用例程|如何去實(shí)現(xiàn)膠圈內(nèi)嵌完整性檢測
一.應(yīng)用背景
我們在生產(chǎn)組裝線上常用的內(nèi)嵌防脫落工件是膠圈。它具有較好密封性和內(nèi)嵌穩(wěn)固性,是一種適應(yīng)性較強(qiáng)的一種密封件。它是通過將尺寸略小于內(nèi)嵌范圍內(nèi)的膠圈嵌入工件內(nèi),以此達(dá)到穩(wěn)固密封的效果。
如果膠圈與工件相互內(nèi)嵌完整性不高或工件漏掉與膠圈內(nèi)嵌的話,就會(huì)導(dǎo)致松懈后的膠圈會(huì)上下滑動(dòng)掉落或組裝工件之間脫離,造成出品的產(chǎn)品密封性質(zhì)量不佳等問題,而造成企業(yè)不盈利的結(jié)果。
并且膠圈與工件相互配合內(nèi)嵌的組裝線需要連續(xù)大批量生產(chǎn),單純依靠人工長時(shí)間進(jìn)行高強(qiáng)度作業(yè)的話,容易造成視力疲勞,主觀判斷出錯(cuò),而導(dǎo)致漏檢和檢測效率、一致性不高等問題。
針對上訴問題,正運(yùn)動(dòng)特此開發(fā)了機(jī)器視覺膠圈內(nèi)嵌完整性檢測解決方案,可快速對工件上的膠圈進(jìn)行有無和內(nèi)嵌準(zhǔn)確度檢測。它在生產(chǎn)組裝線上對工件內(nèi)嵌后進(jìn)行完整性檢測具有較好的應(yīng)用性,同時(shí)也有著廣泛的市場應(yīng)用場景。
上期課程,我們講述了在機(jī)器視覺方案中進(jìn)行U盤視覺定位激光打標(biāo)的應(yīng)用,本期課程我們將和大家一起分享如何去實(shí)現(xiàn)膠圈內(nèi)嵌完整性檢測。
教學(xué)視頻鏈接: https://live.csdn.net/v/220944
二.檢測原理
(一)檢測需求
1.檢測工件上的膠圈有無內(nèi)嵌成功。
2.顯示檢測結(jié)果和統(tǒng)計(jì)今日生產(chǎn)的工件良品和不良品數(shù)據(jù)。
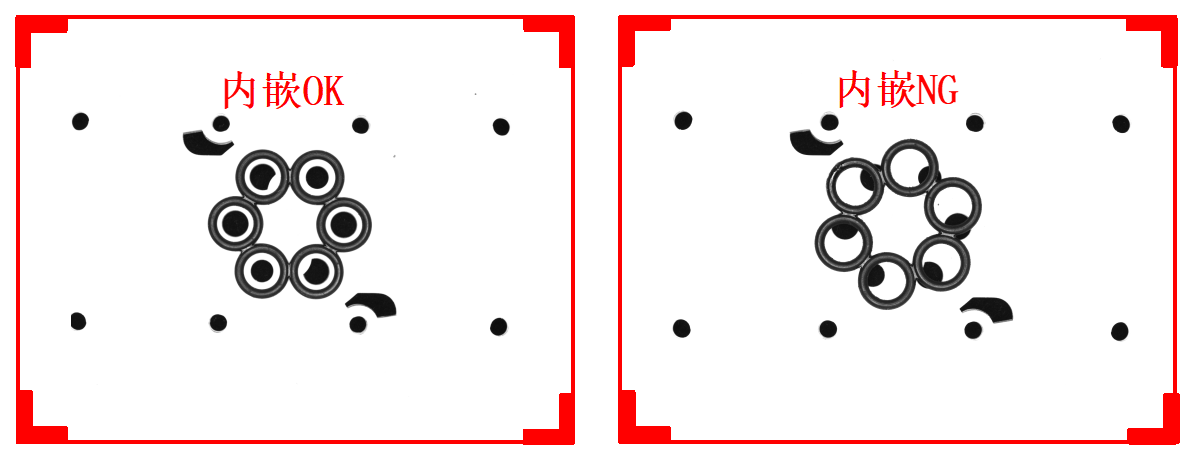
樣品圖
(二)軟件算法
1.首先對圖像進(jìn)行二值化處理。
2.計(jì)算出圖像上指定的白色區(qū)域的面積,接著計(jì)算出白色區(qū)域的連通區(qū)域,之后篩選出圖像上工件的白色連通區(qū)域,再去設(shè)置外接矩陣寬高比過濾掉不接近圓形的白色連通區(qū)域。
3.然后去獲取滿足條件白色連通區(qū)域的數(shù)量去判定膠圈有無內(nèi)嵌成功。
4.最后將工件的膠圈內(nèi)嵌完整性檢測結(jié)果和統(tǒng)計(jì)今日生產(chǎn)的良品、不良品數(shù)據(jù)顯示在主界面上。
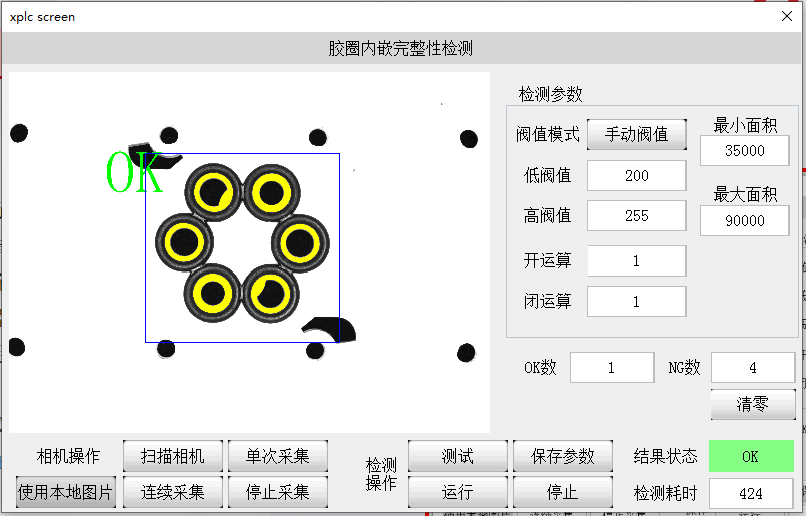
運(yùn)行界面
(三)課前準(zhǔn)備
1.電腦一臺(tái),安裝ZDevelop3.10.07版本軟件;
2.VPLC516E一臺(tái);
3.24V直流電源一個(gè);
4.網(wǎng)線若干;
5.電線若干。
三.軟件實(shí)現(xiàn)
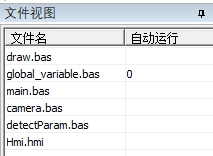
1.打開ZDevelop軟件:新建名稱為“膠圈內(nèi)嵌完整性檢測.zpj”項(xiàng)目→新建“HMI”文件→新建“main.bas”文件 (用于編寫界面響應(yīng)函數(shù)) →新建“detectParam.bas”文件 (用于初始化參數(shù)) →新建“global_variable.bas”文件 (定義全局變量)→新建“camera.bas”文件(用于實(shí)現(xiàn)圖像采集功能)→新建“draw.bas”文件(用于更新繪制ROI數(shù)據(jù))→文件添加到項(xiàng)目。
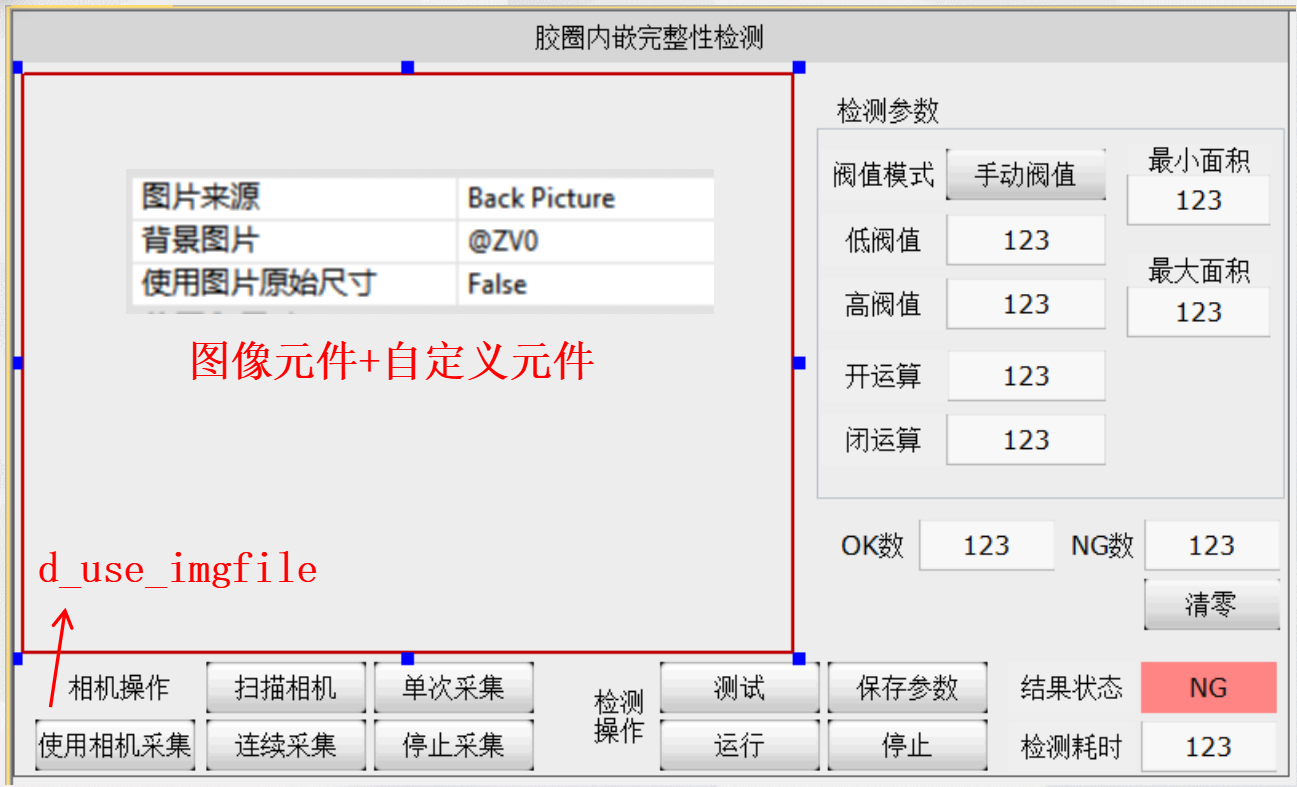
2.設(shè)計(jì)HMI界面。
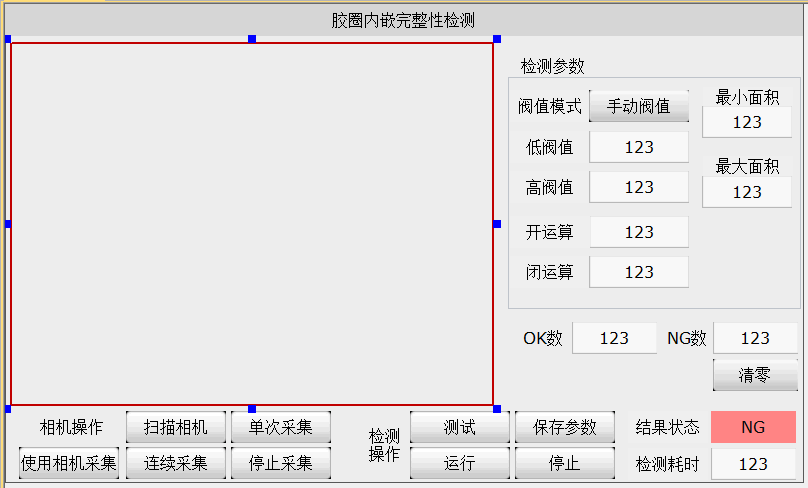
界面設(shè)計(jì)
3.關(guān)聯(lián)HMI界面控件變量。
關(guān)聯(lián)控制變量
(1) 檢測參數(shù)
閾值模式:d_detect_param(0)
最小面積:d_detect_param(3)
最大面積:d_detect_param(4)
低閾值:d_detect_param(1)
高閾值:d_detect_param(2)
開運(yùn)算:d_deal_value(0)
閉運(yùn)算:d_deal_value(1)
(2)數(shù)據(jù)統(tǒng)計(jì)
OK數(shù):TABLE(8)
NG數(shù):TABLE(9)
(3)檢測結(jié)果
結(jié)果狀態(tài):d_rlt_state
檢測耗時(shí):d_detect_time
4. 本期課程代碼主要實(shí)現(xiàn)的功能使用到的指令如下。

指令
四.操作演示
(一)操作步驟
查看運(yùn)行效果:將項(xiàng)目下載到控制器中→使用本地圖片→單次采集→設(shè)置檢測參數(shù) (用于過濾白色連通區(qū)域面積) →矩形ROI框選感興趣區(qū)域→點(diǎn)擊測試(查看檢測結(jié)果)→點(diǎn)擊運(yùn)行(查看連續(xù)運(yùn)行效果)→結(jié)束。
(二)效果演示
打開此鏈接獲取效果演示視頻: https://live.csdn.net/v/220946
本次,正運(yùn)動(dòng)技術(shù)機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)應(yīng)用例程|膠圈內(nèi)嵌完整性檢測,就分享到這里。
本文由正運(yùn)動(dòng)技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國智能制造水平。文章版權(quán)歸正運(yùn)動(dòng)技術(shù)所有,如有轉(zhuǎn)載請注明文章來源。
-
機(jī)器視覺
+關(guān)注
關(guān)注
161文章
4348瀏覽量
120134 -
視覺定位
+關(guān)注
關(guān)注
5文章
49瀏覽量
12377
發(fā)布評論請先 登錄
相關(guān)推薦
機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺上下料應(yīng)用

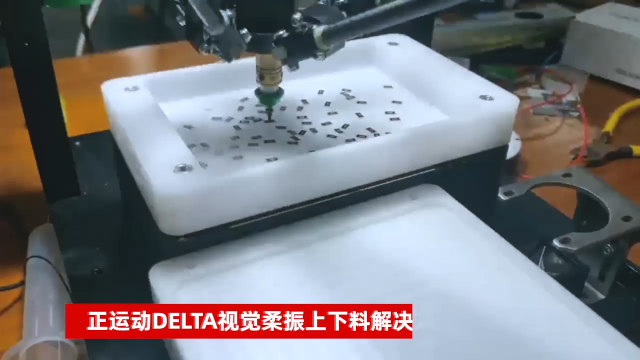
機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺上下料的應(yīng)用#機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)
工控一體機(jī)在高精度玻璃檢測機(jī)中的應(yīng)用
聚徽-工控一體機(jī)有什么創(chuàng)新
機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)VPLC532E在汽車膠帶纏繞的開放式CNC應(yīng)用

VPLC系列機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在五軸聯(lián)動(dòng)點(diǎn)膠上的應(yīng)用
聚徽觸控-工控一體機(jī)和 PLC 一體機(jī)有什么不同

工業(yè)一體機(jī)在物聯(lián)網(wǎng)領(lǐng)域的應(yīng)用
基于VPLC711的曲面外觀檢測XYR運(yùn)動(dòng)控制解決方案
機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在喇叭跟隨點(diǎn)膠上的應(yīng)用
機(jī)器視覺如何檢測橡膠圈外觀尺寸檢測?
機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在光伏匯流焊機(jī)器人系統(tǒng)的解決方案
什么是編解碼一體機(jī)?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論