") 使用功能覆蓋執(zhí)行端到端流量可追溯性
使用功能覆蓋執(zhí)行端到端流量可追溯性
大多數(shù)時候,定義功能覆蓋目標(biāo)是在測試計(jì)劃準(zhǔn)備過程中完成的。對于要驗(yàn)證的被測設(shè)備 (DUT) 的每個功能特性,所有可能的激勵生成都是通過測試用例并在記分板、模型、檢查器和斷言的幫助下開發(fā)的。我們通過檢查該刺激的響應(yīng)來確認(rèn) DUT 的正確性。為了確保我們創(chuàng)建了足夠多的輸入場景和 DUT 響應(yīng)組合,根據(jù)覆蓋組、覆蓋點(diǎn)和斷言覆蓋為每個特征定義了覆蓋目標(biāo),這讓我們對驗(yàn)證特定特征的徹底程度充滿信心。
DUT 的 RTL 塊進(jìn)入從覆蓋類別得分定義的變量,并在具有不同值命中的交叉覆蓋組中使用這些變量將確認(rèn)輸入事務(wù)是否遵循指定的設(shè)計(jì)輸出路徑。出于幾個原因,這非常重要。首先,功能驗(yàn)證記分板確實(shí)進(jìn)行端到端事務(wù)檢查,但它不確認(rèn) DUT 流量路徑激勵已遵循。其次,單個覆蓋組或 UVM RAL Regmodel 功能覆蓋或斷言覆蓋將有助于單個刺激覆蓋,但組合使用將確保功能路徑的正確性。讓我們詳細(xì)看看我們?nèi)绾问褂霉δ芨采w來確認(rèn)從輸入到輸出端口的流量穿過所需的數(shù)據(jù)和控制路徑。
執(zhí)行流量追溯
很多時候,僅僅涵蓋單個特征和交叉特征是不夠的。通過遍歷不同數(shù)據(jù)塊、各種控制邏輯和不同 DUT 配置的所有可能組合來檢查輸入接口的流量是否已到達(dá)另一端的輸出接口,這是一個基本要求。
在控制塊接口上具有用于 DUT 輸入、輸出接口的單獨(dú)覆蓋組,regmodel 自動生成的功能覆蓋可能無法保證基于寄存器配置。輸入事務(wù)、數(shù)據(jù)包或命令已通過所需的數(shù)據(jù)塊和控制路徑,或已繞過典型的控制塊。
使用交叉覆蓋,在覆蓋類之外定義并用于存儲來自各種寫入方法的事務(wù)的變量上,可以確保這些變量的不同值被命中并跟蹤設(shè)計(jì)的 DUT 路徑。覆蓋組也將在覆蓋類之外定義。
設(shè)想
讓我們考慮一個場景,如圖 1 所示。在一個高度配置的 DUT 中,一個輸入……一個數(shù)據(jù)包可以通過選擇的數(shù)據(jù)路徑和控制路徑塊以及通過基于寄存器配置的選擇的數(shù)據(jù)包路由器端口路由到輸出端口。帶有字段 RT=2‘b01 的寄存器 CTRNL_RUT 使用 Cntrl_plan1、交換機(jī) 1(圖中未顯示)決定從輸入端口 1 通過 DataPath_blk1 到路由器端口 1 并最終到輸出端口 1 的數(shù)據(jù)包路徑。但是,寄存器 CTRNL_RUT.RT= 2’b10 將使用 Cntrl_plan2 和路由器端口 2 通過 DataPath_blk2 更改新傳入數(shù)據(jù)包的路由。
在這種情況下,為 datapath_block1、控制路徑(即 Cntrl_plane1)和寄存器字段 RT 定義的覆蓋組將分別覆蓋激勵值。但是,如果變量定義在覆蓋類范圍之外,保存來自這些接口的信號值,并且如果在具有有趣值的交叉覆蓋中使用,則可以確認(rèn)數(shù)據(jù)包已通過正確的路徑并實(shí)現(xiàn)數(shù)據(jù)包可追溯性。
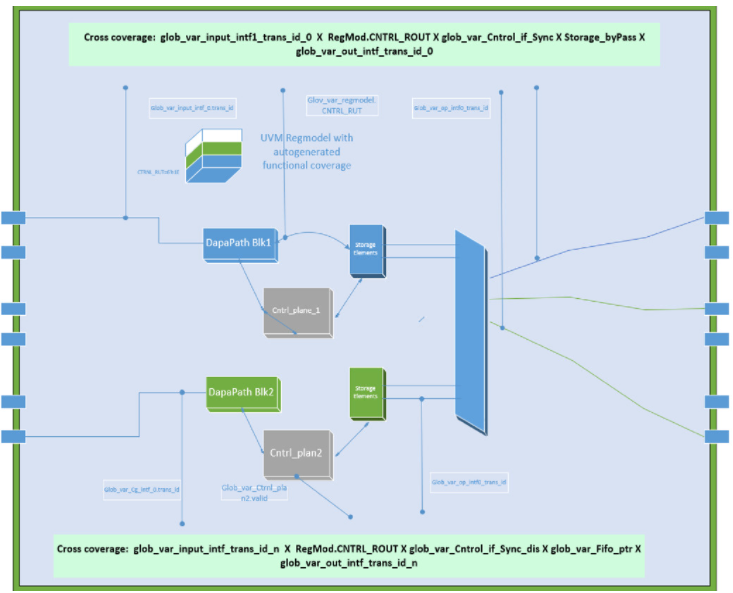
圖 1 : 在每個點(diǎn)獲取信息的交通跟蹤
覆蓋實(shí)施
在測試平臺中,環(huán)境類通常具有在其中實(shí)例化的所有接口代理、功能覆蓋和記分板。IO 和控制接口監(jiān)視器的分析端口連接到功能覆蓋類的出口,以獲取接口數(shù)據(jù)包和事務(wù)。所需資源,如 regmodel,將使用 uvm_condig_db 構(gòu)造將不同的配置對象設(shè)置為覆蓋類。覆蓋實(shí)現(xiàn)明智,定義變量,覆蓋類之外的數(shù)據(jù)包存儲元素,并使用它們來復(fù)制重要接口信號、控制信號和數(shù)據(jù)包字段的值。這些在覆蓋類之外定義的變量將用于交叉覆蓋。
如上圖 1 所示,覆蓋類之外定義的變量將用于保存數(shù)據(jù)包 ID 等信息,對 DataPath_blk1 有效。對于控制平面,保存準(zhǔn)備就緒、狀態(tài)、目標(biāo) ID、路由通道號等信息。可以將 CTRNL_RUT.RT 值等字段的寄存器值與這些變量交叉,以確保如果 RT 的字段值為 01,則 Datapath_blk1 字段和控制計(jì)劃信號具有感興趣的值。使用上述方法實(shí)現(xiàn)功能覆蓋將很有幫助,尤其是在塊和集群級別驗(yàn)證的情況下。覆蓋類的獨(dú)立實(shí)現(xiàn)探索了具有類似 DUT 接口的項(xiàng)目之間的可重用性選項(xiàng)。
寄存器配置信息也可以通過接口接收,但又需要解碼地址和字段,所以使用regmodel會很有意義。Regmodel 帶有豐富的 API 和默認(rèn)序列集,可以使用它們的屬性來運(yùn)行所有寄存器和字段。基于 Regmodel 的自動生成功能覆蓋可以單獨(dú)處理。
嵌入式覆蓋組存在一個已知限制。我們不能使用相同覆蓋組的多個實(shí)例作為數(shù)據(jù)類型,因此在功能覆蓋類之外定義覆蓋組將有助于定義覆蓋組數(shù)組,特別是如果大多數(shù)接口屬于相同類型,通常會有所幫助網(wǎng)絡(luò)域 DUT 的情況。具有多個實(shí)例的單個覆蓋組可以在覆蓋類的每個write_《》方法中使用不同的索引進(jìn)行采樣。
代碼示例
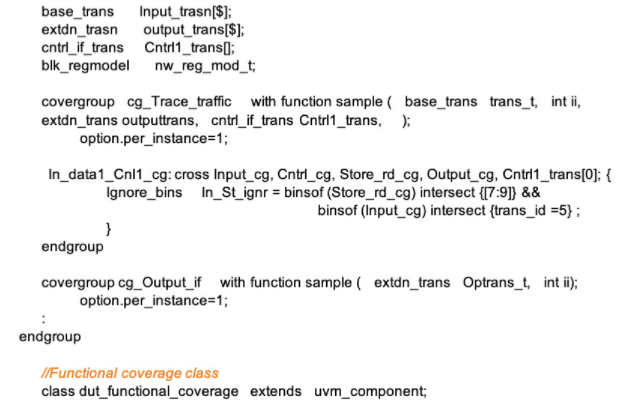
在上面的例子中,covergroup 和 variable 存儲來自 write 方法的事務(wù)和接口信號,并在類外部聲明。這將允許跨覆蓋組使用這些變量。
結(jié)論
基于將驗(yàn)證事務(wù)或數(shù)據(jù)包的重要接口信號,可以定義覆蓋類范圍之外的全局變量并用于復(fù)制這些信號。每個接口信號、控制信號也可以這樣做,并且可以在一個覆蓋組中使用許多全局變量,這將定義這些變量的交叉覆蓋。這就是您可以確認(rèn)從輸入到輸出端口的流量通過所需數(shù)據(jù)和控制路徑的方式。
審核編輯:郭婷
-
寄存器
+關(guān)注
關(guān)注
31文章
5317瀏覽量
120007 -
接口
+關(guān)注
關(guān)注
33文章
8497瀏覽量
150834 -
路由器
+關(guān)注
關(guān)注
22文章
3707瀏覽量
113541
發(fā)布評論請先 登錄
相關(guān)推薦
連接視覺語言大模型與端到端自動駕駛

智己汽車“端到端”智駕方案推出,老司機(jī)真的會被取代嗎?

端到端讓智駕強(qiáng)者愈強(qiáng)時代來臨?
端到端InfiniBand網(wǎng)絡(luò)解決LLM訓(xùn)練瓶頸

Mobileye端到端自動駕駛解決方案的深度解析

端到端測試用例怎么寫
端到端測試不正常如何處理
恩智浦完整的Matter端到端解決方案
實(shí)現(xiàn)自動駕駛,唯有端到端?

四端電阻的電流端和電壓端是如何區(qū)分的
理想汽車加速自動駕駛布局,成立“端到端”實(shí)體組織
周光:不是真“無圖”,談何端到端

小鵬汽車發(fā)布端到端大模型
理想汽車自動駕駛端到端模型實(shí)現(xiàn)

康謀方案 | 基于場景的端到端硬件在環(huán)(HiL)測試智能解決方案
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論