 rt-thread 心法系列(二) 使用寶典
rt-thread 心法系列(二) 使用寶典
前言
接觸 rt-thread 已有半年,混論壇也5個半月了,期間遇到過各種奇奇怪怪的棘手問題,有過尷尬,也自信曾經提供過比較妙的應對方案。所以產生了將一些典型的使用技巧匯總分享出來的想法,遂有此篇。
PS: 接觸 rt-thread一年多了,這篇文章也經歷了多次增補
入門篇
Q1. 剛下載的 SDK 啥也沒干,編譯沒錯,為啥程序跑不起來?
如果使用 keil + env 環境,下載源碼后的**第一件事就是 `menuconfig`** ;
如果使用 RT-Studio ,創建項目后的**第一件事就是打開 Settings** ;
把其中所有配置頁面所有配置項全瀏覽一遍,取消掉所有不相干的配置,最后只留一個內核。
先保證最小系統跑起來,用點燈程序驗證最小系統運行正常。然后再添加自己需要用到的功能和底層外設等等。
Q2. 剛下載的 SDK 啥也沒干,編譯沒錯,為啥程序跑起來 hard fault on thread?
**同上**
Q3. 剛下載的 SDK 啥也沒干,編譯為啥報錯了?
**同上**
內核篇
Q1. RT_NAME_MAX 定義多少合適
原則上越少越省內存,以內核對象 100 個為例,一個對象名占用 8 字節,總共是 800 字節。但是考慮到 `struct rt_object` 結構體定義,后面跟了兩個 rt_uint8_t 型變量。
RT_NAME_MAX 可以定義成 2n + 2
Q2. RT_DEBUG
如非必要,不要開啟內核調試。除非,你真的想學習內核,或者調試內核的問題。
Q3. 線程棧大小定義多少合適?
這個問題和應用有很大關系,如果僅僅是一個最小內核系統,除了 idle 線程,沒有使用其它中斷和應用,256 也將將夠。如果添加了應用代碼,還有中斷和消息機制。建議 1024 起步。
Q4. 怎么快速計算 GET_PIN 返回的編號?
我們知道,芯片的 GPIO 分組往往是從 PA 開始,往后依次是 PB PC PD PE ... PZ。往往的,每組端口或者是 16bit 或者是 8bit (分別對應 16 個 IO 和 8 個 IO)。下面給出 `GET_PIN` 的簡化公式:
16bit 是 `(X - A) * 16 + n`
> A10 就是 10.
C9 就是 2*16+9=41.
H1 就是 7*16+1=113.
8bit 是 `(X - A) * 8 + n`
這個公式別忘啊,別忘了!
PS: 有種,他們的引腳號編碼很奇特,比如 RA6M4 ,見[【開發板評測】Renesas RA6M4開發板之GPIO、IIC(模擬)]( https://club.rt-thread.org/ask/article/36fe553196532ddd.html ) 第二節部分。
Q5. 硬定時器、軟定時器、硬件定時器,傻傻分不清楚
rt-thread 內核定義了軟件定時器,和硬件定時器不同,硬件定時器需要占用一個定時器外設,還有各種比較、捕獲等功能。軟件定時器僅僅是簡單的設定一個時間,時間 timeout 的時候執行我們設定的回調函數。
rt-thread 定義的軟件定時器還細分兩種,“硬定時器” “軟定時器”,前一種是在 SysTick 中斷中執行回調函數的,多數用于線程內置定時器,應用層也可以用,但是要時刻謹記它的回調函數是在中斷中執行的。
后一種,是在一個線程中運行的,應用層對定時精度要求不是很高的可以用這種,但是也要注意“定義定時器和執行定時器回調函數的線程是兩個不同的線程!”
Q6. 消息隊列池申請多少內存合適?
rt_err_t rt_mq_init(rt_mq_t mq, const char *name, void *msgpool, rt_size_t msg_size, rt_size_t pool_size, rt_uint8_t flag);
rt_mq_t rt_mq_create(const char *name, rt_size_t msg_size, rt_size_t max_msgs, rt_uint8_t flag)
如果使用 `rt_mq_create` 創建消息隊列,消息隊列池自動根據消息體大小 `msg_size` 和消息隊列最多容納的消息數量 `max_msgs` 計算。
但如果使用 `rt_mq_init` 初始化消息隊列,消息隊列池的內存 `msgpool` 需要用戶提供,這個時候,需要注意消息池內存大小 `pool_size`。根據下面的公式計算得出:
`(RT_ALIGN(msg_size, RT_ALIGN_SIZE) + sizeof(struct rt_mq_message*)) * max_msgs`
其中,`msg_size` 是消息體大小,`max_msgs` 是消息隊列中最多消息容量。
Q7. 使用消息隊列注意
雖然 `rt_mq_send` `rt_mq_send_wait` `rt_mq_urgent` `rt_mq_recv` 幾個 api 有 size 參數,但是請嚴格按照 `rt_mq_init` `rt_mq_create` 中的 msg_size 參數值傳遞相等的實參值。***千萬不要隨意改變 size 參數的數值***。
換種說法,別用消息隊列直接發變長數據。
Q8. INIT_xxx_EXPORT 宏詳解
當初接觸 rt-thread 第一個讓我感觸的地方就是,main 函數里沒有初始化配置,上來直接就是一個單獨的線程。而,其它線程都通過 INIT_APP_EXPORT 自動啟動了。
rt-thread 一共定義了 6 個啟動階段,
/* board init routines will be called in board_init() function */
#define INIT_BOARD_EXPORT(fn) INIT_EXPORT(fn, "1")
/* pre/device/component/env/app init routines will be called in init_thread */
/* components pre-initialization (pure software initilization) */
#define INIT_PREV_EXPORT(fn) INIT_EXPORT(fn, "2")
/* device initialization */
#define INIT_DEVICE_EXPORT(fn) INIT_EXPORT(fn, "3")
/* components initialization (dfs, lwip, ...) */
#define INIT_COMPONENT_EXPORT(fn) INIT_EXPORT(fn, "4")
/* environment initialization (mount disk, ...) */
#define INIT_ENV_EXPORT(fn) INIT_EXPORT(fn, "5")
/* appliation initialization (rtgui application etc ...) */
#define INIT_APP_EXPORT(fn) INIT_EXPORT(fn, "6")
其中, INIT_BOARD_EXPORT 運行在任務調度器啟動前,也是唯一任務調度器運行前被執行的。這里是外設初始化配置階段。
其余幾個階段都是任務調度器啟動以后,由 main 線程(標準版,如果使用了 main 線程)負責執行。
這些階段并不是完全固定,有些是可以調整的,例如,我曾經把 lcd 的初始化從 DEVICE 提前到 BOARD ,而把 emwin 的初始化放到 PREV 。還在 ENV 階段初始化了一些消息隊列等等。
大部分情況下,以上幾個階段可以完成所有定義的初始化工作。但是,也難免出現沖突的可能。
例如,github [#5194]( https://github.com/RT-Thread/rt-thread/pull/5194 ) 上的這個 pr。里面還提供了很多反應這個問題的鏈接。以及很多人提出的解決方案。
個人認為,啟動順序在同一級的,而且之間有依賴/互斥關系的兩個部分。這種情況,應要求開發者自己注意調整代碼執行順序,把兩個部分初始化過程寫到同一個函數里,由開發者自己維護依賴關系。
Q9. 怎么通過 rt_thread_suspend rt_thread_resume 掛起喚醒某線程
盡量不要這么做,在 rt-thread 里,一個線程進入 suspend 態有兩種情況,一種是時間片耗盡自動讓出 cpu;一種是等待資源阻塞讓出 cpu。兩個線程之間并沒有完整透明的了解對方當前狀態的途徑。
假如某線程 A 想顯式掛起線程 B,但是,A 并不知道 B 當前是運行中讓出 cpu,還是等待資源中已經處于掛起狀態,還是資源可用正在從掛起態被喚醒過程中。所以,不明就里地掛起其它線程的做法是危險的。
筆者唯一能想到的,就是 B 線程執行任務比較多,自己不會主動出讓 cpu。而且,它的線程優先級比較低,某高優先級線程 A 在某種條件下使得 B 掛起。但是這樣線程 B 勢必會影響到 idle 線程。
其實,這種場景,完全可以使用線程間同步機制實現,線程 B 通過發信號給 A 而掛起自己;線程 A 再通過另外一個信號喚醒線程 B。
曾經以為自己能找到直接使用這倆 api 的方式,有一天,突然想到 rt-thread 的 ipc 都是針對性的,因信號量掛起的,不可能因為郵箱被喚醒。因為時間片耗盡掛起的線程也別想著會被什么資源喚醒。掛起和喚醒具有唯一性。
Q10. list_thread 或 ps 查看線程狀態不對?
1. error 列的線程錯誤沒有多少參考價值,0 是正常,-2 表示超時,執行一個 `rt_thread_mdelay` 就變 -2 了。但并不表示有錯誤。目前還沒有看到賦值有其它錯誤值的代碼。
2. status 列代表當前線程狀態。但是呢,因為 list_thread 或 ps 兩條命令是在 tshell 線程執行的,所以 tshell 線程肯定是 running ;idle 線程不可能被掛起,肯定顯示的是 ready;其它線程可能會出現 ready,但是多數時候是 suspend。但是這并不表示其它線程一直是 suspend 不被調度了。
Q11. 定時器可以執行長時間操作?
如上所說,rt-thread 中有三種定時器,每種定時器有各自的特點
硬件定時器:回調函數在中斷里,不建議直接執行長時間操作。
硬定時器:同樣也是在中斷執行回調函數,不建議直接執行長時間操作。
軟定時器:由定時器線程執行調用回調函數的軟定時器,是具有執行長時間操作的理論基礎的。定時器線程同樣是一個線程,它也有自己的線程棧,優先級等。如果某些操作是獨立的,把它們放到某特定線程里和在定時器線程運行是沒區別的。
但是,目前定時器線程處理軟定時器的方式不適合執行長時間操作。需要進行修改后才能做到。具體修改方法見 rt-thread優化系列(三)軟定時器的定時漂移問題分析
注意:定時器線程的優先級需要根據需要進行調整;若有多個軟定時器,回調函數執行都比較長,必然存在某回調被延遲執行的可能性,這個是無法避免的。
Q12. "Function[xxx] shall not be used in ISR" 錯誤是怎么回事兒?
以及類似的錯誤 "Function[xxx] shall not be used before scheduler start"
詳見 rt-thread心法系列(一)那些你必須知道的幾類 api
開發環境篇
Q1. 改變 env 或者 RT studio 下載源
rt studio 內置了 env 環境,studio 可能也是借助 env 實現下載更新組件的。有些第三方組件的主倉庫在 github 上,這樣就難為了很多小伙伴,經常因為訪問不了 github 而出現下載更新失敗。其實官方提供了鏡像下載的方式,鏡像倉庫在 gitee 上,我們需要切換 env 下載方式為鏡像下載。見此文章 RT-Studio 切換鏡像服務器下載
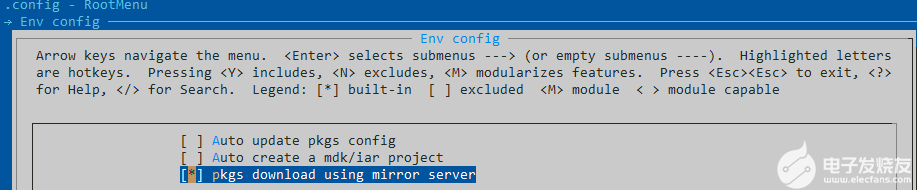
文章中 **RTT_逍遙** 大佬提供了個命令 `menuconfig -s` ,這個命令也可以,查看 menuconfig 的幫助信息可以得到詳細說明。
Q2. 生成 MDK5 項目,配置變了怎么辦?
當執行 `scons --target=mdk5` 的時候,scons 從當前目錄下的 "template.uvprojx" 文件為模版生成 "project.uvprojx" 項目配置文件。
我們修改項目配置,啟用了 "Use MicroLIB" "Browse Information" "GNU extensions" 等等之后,重新生成可能導致之前的修改丟失,可以通過修改 "template.uvprojx" 文件
"0" 為 "1"
"0" 為 "1"
"0" 為 "1"
還比如,有人問,“[用Scons 生成keil工程時, 如何導入sct文件?]( https://club.rt-thread.org/ask/question/433781.html )”
打開 "template.uvprojx" 文件找到 “ScatterFile” 的位置,修改里面的文件路徑及文件名就可以了。
`.boardlinker_scriptslink.sct`
其它可類比。
Q3. 修改 scons 使用的編譯器
找到 rtconfig.py 文件,一般和 rtconfig.h 文件同目錄,文件開頭有幾個變量
# toolchains options
ARCH='arm'
CPU='cortex-m4'
CROSS_TOOL='gcc'
分別定義了,cpu 核架構,版本,以及使用的交叉編譯工具鏈平臺。目前支持 gcc keil iar 三種平臺。
接下來,針對每一種平臺,使用不同的交叉編譯工具鏈及其安裝路徑
最后是每種交叉編譯工具鏈編譯選項。
通過修改 `CROSS_TOOL='gcc'` 的定義可以修改編譯器。
Q4. env 下的兩種界面配置姿勢
他人都說 studio 好,我卻獨衷心 env。
以前只知道 menuconfig,從此還有一個 `scons --pyconfig`。
論壇 mysterywolf 大佬發現的這個命令,像撿到一個寶,不習慣 menuconfig 的童鞋,喜歡 studio 配置可以點點點的童鞋,你們可以回來繼續使用 env 啦!

修改完,點 SAVE -》關閉。
還支持搜索跳轉,點 Jump to...,彈出界面里輸入搜索內容,Search。
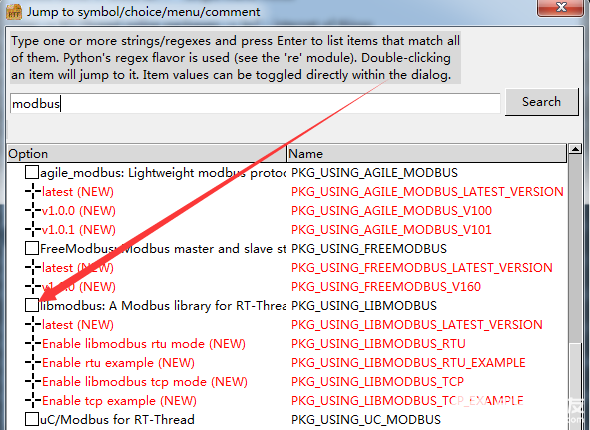
選項里可以直接配置,或者雙擊跳回原菜單位置。
比 studio 或 menuconfig 里的功能一點兒不少,還更方便操作啦。
Q5. menuconfig 找不到需要的在線包怎么辦?
執行 `pkgs --upgrade` 命令,注意!不是 `pkgs --update` !
前一條命令用于更新 env 自帶的 RT-Thread online packages 包列表信息。后者用于下載、更新、刪除選擇的包。
Q6. RT-Studio 怎么修改編譯選項?
在 env 環境下,每個 bsp 根目錄下都有個 rtconfig.py 文件,里面是各種開發環境下交差編譯工具鏈配置(上文有提及過)。
修改了 rtconfig.py 文件后,使用 scons 編譯直接使用的修改后的配置;使用 keil 開發需要執行 `scons --target=mdk5`,把新修改同步更新到 keil 項目配置文件里。
如果使用 RT-Studio 呢?。
1. 修改 RT-Studio 里的編譯配置,需要按照 eclipse 的方式來。右鍵項目》》屬性》》C/C++ 構建》》設置》》工具設置,在這里可以修改的有 c 編譯器選項、c++ 編譯器選項、鏈接器選項,blablabla 眼花繚亂的不一定能改對,小心謹慎,多加練習吧。
2. 使用 `scons --target=eclipse`,更新 RT-Studio 項目配置文件。需要注意的是,執行這個命令前先關掉 RT-Studio ,然后打開 env 切換到項目目錄下,刪掉 ".cproject" 項目文件,最后修改 rtconfig.py 文件后執行 `scons --target=eclipse`。
Q7. 添加第三方 lib 及其搜索路徑
添加 lib 和路徑也需要在 rtconfig.py 文件里修改,修改 LFLAGS 變量,增加庫 `-lxxx` 。修改 LPATH 添加庫搜索路徑。
修改 rtconfig.py 之后按照上一小節的操作步驟刷新一下 IDE 工程文件。
還有一些 lib 是跟隨軟件包組件添加的,修改軟件包目錄下的 Scronscript 文件,
pathlib = [cwdlib + '/Lib']
group = DefineGroup('STemWin2RTT', src, depend = [''], CPPPATH = path, LIBS=['STemWin532_CM4_OS_Keil_ot'], LIBPATH = pathlib)
`pathlib` 用于添加 lib 文件路徑。
“DefineGroup” 定義組時,增加兩個參數 `LIBS=['STemWin532_CM4_OS_Keil_ot'], LIBPATH = pathlib` 分別指定庫名稱和庫路徑。
Q8. 添加頭文件包含路徑
因為 rt-thread 源碼默認是 scons 自動化開發環境。源碼中有大量的 Scronscript 腳本文件,這些文件控制著源碼文件是否參與編譯,增加哪些頭文件搜索路徑
`src += ['xxxx.c']` 添加源碼文件。
`path += [cwd + '/ports']` 添加頭文件路徑。
外設驅動篇
Q1. USB Host 不識別 U 盤等設備
詳見 [rt-thread STM32F4 usbhost 調試筆記](https://club.rt-thread.org/ask/article/2878.html)
這里還有另外兩位大佬提供的修改方案,可以都嘗試一下。或者集眾家之長,前一段時間我按照兩位大佬的也修改了一下,感覺都是可以兼容的,暫未發現問題。
PS: STM32 系列的芯片,可能要求 USBHOST 時鐘頻率是 48MHz ,這個要注意。
Q2. NAND Flash 驅動
[gitee](https://gitee.com/thewon/rt_thread_repo) 有完整代碼
Q3. 移植 yaffs2 文件系統
配合上面的 nand flash 驅動使用。
[gitee](https://gitee.com/thewon/rt_thread_repo) 有完整代碼
Q4. 更高效的串口驅動框架 serialX
請移步系列文章,從理論提出到實現,到實踐驗證,測試程序,用法demo,全套的。
rt-thread 驅動篇(一) serialX 框架理論
rt-thread 驅動篇(二) serialX 理論實現
rt-thread 驅動篇(三) serialX 壓力測試
rt-thread 驅動篇(四)serialX 多架構適配
rt-thread 驅動篇(五)serialX 小試牛刀
使用篇
Q1. 串口通訊數據被分多次接收了,怎么辦?
首先說明,串口是一種流設備,無協議接口。它收到一個字節給你一個字節,收到兩個字節給你兩個字節。如果你的數據是整齊的 16 個字節,而且想每收 16 個字節串口驅動給你個信號,這就難為人了。還有一種情況是,前后兩次不同的數據被拼接在一起了。
這個時候,需要我們在應用層進行處理。或者是定長包,或者定義包頭包尾,包長度等等。下面給出我在論壇上多次分享過的代碼,這個是帶包頭包尾的,在這個基礎上可以修改成其它各種形式包協議的。
rt_uint8_t *recvbuf = RT_NULL;
static struct serial_configure uart_conf = RT_SERIAL_CONFIG_USER;
rt_uint8_t *datbuf = RT_NULL;
rt_size_t rcv_off = 0, recv_sz = 1024, tmp = 0;
rt_size_t dat_off = 0, dat_len = 0, i;
rt_tick_t _speed_ctrl = 0;
recvbuf = rt_malloc(128);
rt_memset(recvbuf, 0, 128);
datbuf = rt_malloc(32);
rt_memset(datbuf, 0, 32);
busif_speed_ctrl = rt_tick_get();
rt_sem_init(&rx_sem, "bifrx", 0, 0);
dev_busif = rt_device_find("uart1");
if (dev_busif == RT_NULL)
{
rt_kprintf("Can not find device: %sn", "uart1");
return;
}
if (rt_device_open(dev_busif, RT_DEVICE_OFLAG_RDWR | RT_DEVICE_FLAG_INT_RX |
RT_DEVICE_FLAG_STREAM) == RT_EOK)
{
rt_device_set_rx_indicate(dev_busif, busif_rx_ind);
}
while(1) {
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
recv_sz = rt_device_read(dev_busif, -1, &recvbuf[rcv_off], 128-rcv_off);
if (recv_sz > 0) {
rt_kprintf("data: %dn", recv_sz);
if (rcv_off == 0) {
i = 0;
while ((recvbuf[i] != 0x1A) && (i < recv_sz)) i++; // find header
if (i == 0) {
rcv_off = recv_sz;
} else if (i < recv_sz) {
rcv_off = recv_sz-i;
rt_memcpy(recvbuf, &recvbuf[i], recv_sz-i);
} else { // no header
rcv_off = 0;
continue;
}
} else {
rcv_off += recv_sz;
}
if (rcv_off < 2) { // data not enough
continue;
}
dat_len = recvbuf[1];
if (dat_len > 16) { // error length
rcv_off = 0;
dat_len = 0;
continue;
}
if (rcv_off >= (dat_len + 3)) { // len enough
float val = 0;
AdcVal adc_val;
if (recvbuf[9+2] != 0x1B) { // find tailer error
dat_len = 0;
rcv_off = 0;
continue;
}
tmp = rcv_off-(dat_len + 3);
_speed_ctrl = rt_tick_get();
if (/*busif_busy > 0 || */(_speed_ctrl - busif_speed_ctrl < 100)) {
busif_busy--;
if (tmp > 0) {
rt_memcpy(recvbuf, &recvbuf[dat_len + 3], tmp);
rcv_off = tmp;
} else {
rcv_off = 0;
}
dat_len = 0;
continue;
}
switch(recvbuf[2]){ // map function type id
case 1:
adc_val.type = FUNC_DCV;
break;
case 2:
adc_val.type = FUNC_DCI;
break;
default: // unsupport type id
if (tmp > 0) {
rt_memcpy(recvbuf, &recvbuf[dat_len + 3], tmp);
rcv_off = tmp;
} else {
rcv_off = 0;
}
dat_len = 0;
rt_kprintf("error type: %dn", adc_val.type);
continue;
break;
}
rt_memcpy(datbuf, recvbuf+4, 7); // change str 2 float
datbuf[7] = 0;
rt_kprintf("%sn", datbuf); // 數據域 ,可以是字符串,可以是十六進制數據
// 其它數據處理
....
// prepare next package 準備下一包
if (tmp > 0) {
rt_memcpy(recvbuf, &recvbuf[dat_len + 3], tmp);
rcv_off = tmp;
} else {
rcv_off = 0;
}
dat_len = 0;
}
}
}
項目代碼,神明保佑,別被老板看到
Q2. 線程間傳輸不定長數據
有兩種消息機制可以傳輸數據,郵箱和消息隊列。以下是一些使用建議:
- 郵箱傳輸的是定長 32bit 數據,或者是一個整型值,或者是一個地址;
- 消息隊列的可伸縮性更強,而且有隊列,消息體大小由用戶決定,但是,一經初始化,消息體大小也是固定長度的了。
- 對于某些不同類型數據,每種數據長度固定,而且各種類型數據長度差別不是很多的情況,我們可以使用聯合體代替結構體。這樣消息體的長度也是固定的,以最長長度為準。
- 用郵箱傳遞內存地址,這樣不限定數據長度,但是要求每一次郵箱必須被接收方接收。發送方申請內存,接收方釋放內存。如果出現郵箱發送失敗,由發送方釋放內存。
- 用消息隊列傳遞內存地址,比郵箱的優勢就在于它能緩存多個地址,降低發送失敗的風險。
- pipe 管道或 ringbuffer。pipe 內部數據結構也是 ringbuffer。雖然可以讀寫任意長度數據,但是,這樣又將數據變成流了。需要讀取方根據事先約定的協議進行解析拆分。還有個缺陷是它沒有消息機制,寫方需要單獨發消息通知接收方,或者,接收方死等這個數據。鑒于這種方式必須用鎖,不適合中斷和線程之間的數據傳輸。
Q3. 插上 U 盤怎么通知應用程序?
[gitee](https://gitee.com/thewon/rt_thread_repo) 有完整代碼,主要修改在 hub.c 和 udisk.c 兩個文件
Q4. 怎么優雅的掛載多種存儲設備?
內存、片上 flash 、片外 spi flash、sd 卡、U盤... 各式各樣的的設備,掛載的文件系統也可能不一而足。怎么優雅的把多種設備掛載到文件系統就是個需要考慮的問題了。
1. 掛載 rom 根文件系統,同時創建其它可讀寫文件系統掛載點。
2. 其它設備分別掛載到 rom 文件系統的掛載點上。
Q5. rom 文件系統
rt-thread 源碼目錄下 “components/dfs/filesystems/romfs” 有個 romfs.c 文件,是 rom 文件系統配置模板文件,拷貝它到你的應用目錄下,修改 `_root_dirent` 定義。可以創建只讀文件。
RT_WEAK const struct romfs_dirent _root_dirent[] =
{
{ROMFS_DIRENT_DIR, "dummy", (rt_uint8_t *)_dummy, sizeof(_dummy) / sizeof(_dummy[0])},
{ROMFS_DIRENT_FILE, "dummy.txt", _dummy_txt, sizeof(_dummy_txt)},
};
或者,只有目錄
RT_WEAK const struct romfs_dirent _root_dirent[] =
{
{ROMFS_DIRENT_DIR, "mnt", RT_NULL, 0},
{ROMFS_DIRENT_DIR, "usr", RT_NULL, 0},
{ROMFS_DIRENT_DIR, "var", RT_NULL, 0},
};
有了只讀文件系統,可以很方便擴展掛載很多其它文件系統。
Q6. 絲滑掛載設備
在嵌入式里很多存儲設備是焊接到電路板上的存儲芯片。如果我們有在存儲芯片上掛載文件系統的需求,出廠生產必須有方式對存儲設備進行格式化。為此,可能難倒一大批流水線工人。可以使用下面的流程進行掛載。
result = dfs_mount(mtd_dev->parent.parent.name, "/usr", "yaffs", 0, 0);
if (result == RT_EOK)
{
rt_kprintf("Mount YAFFS2 on NAND successfullyn");
}
else
{
result = dfs_mkfs("yaffs", mtd_dev->parent.parent.name);
if (result == RT_EOK)
{
result = dfs_mount(mtd_dev->parent.parent.name, "/usr", "yaffs", 0, 0);
}
else
{
rt_kprintf("Mount YAFFS2 on NAND failedn");
return -RT_ERROR;
}
rt_kprintf("Mount YAFFS2 on NAND successfullyn");
}
掛載失敗,直接格式化,有些比較暴力,但是不需要人工格式化存儲設備了。
Q7. 如何自動掛載文件系統
兩種方式:一種是通過配置,啟用 RT_USING_DFS_MNTTABLE 。這種方式需要使用者自己實現一個結構體數組 `const struct dfs_mount_tbl mount_table[]` 。
另一種就是自己寫代碼掛載不同設備。我喜歡這一種,因為這樣我可以使用上一小節提到的設計。
Q8. assertion failed at function:rt_xxxxx
問題是我沒調用 `rt_xxxxx` 函數啊?!
這種問題分兩種:
一種是,確定這個函數在運行中正常調用的,例如:(tid != RT_NULL) assertion failed at function:rt_applilcation_init,可以確定的是 `rt_applilcation_init` 函數運作于線程調度器啟動前,這個時候肯定不會是多線程非法寫了內存引起的。可以確定是因為 `rt_thread_create` 函數調用返回了空指針。那么,問題來了,堆初始化成功了嗎?內存有多大?
另外一種是,沒有調用那個函數的地方,但是提示這個函數參數檢測出錯。這種情況大概率是 PC 指針飛了。走到了不應該走到的位置。
定位問題方法請見下節。
Q9. hard fault on thread: xxx
考慮了很久,要不要把這個加進來。出現這個錯誤提示的可能性太多了。從現象上看也分兩類,一類比較確定的,程序走到這個位置必然出現;一類不太確定,每次運行可能現象不一樣。
- 環境搭建問題,系統移植有缺陷引起的。
- 線程棧太小,線程棧爆棧。
- 數組越界、野指針、函數參數傳參錯誤...
- 邏輯性錯誤,內存釋放后還有可能被使用。多發生在外設的接收緩存上。
但是,上面這些只是扯淡,并不能定位到錯誤位置。定位問題是個方法論范疇的概念。每個人都應該有自己熟悉的一套做法,我的想法請見 rt-thread 工具講解系列(二) 之 如何排查系統 bug
Q10. 怎么定義變量到指定內存位置?
非 gcc 版
- 定義一個宏
#ifndef __MEMORY_AT
#if (defined (__CC_ARM))
#define __MEMORY_AT(x) __attribute__((at(x)))
#elif (defined (__ARMCC_VERSION) && (__ARMCC_VERSION >= 6010050))
#define __MEMORY_AT__(x) __attribute__((section(".ARM.__AT_"#x)))
#define __MEMORY_AT(x) __MEMORY_AT__(x)
#else
#define __MEMORY_AT(x)
#warning Position memory containing __MEMORY_AT macro at absolute address!
#endif
#endif
- 使用 `uint8_t blended_address_buffer[480*272*2] __MEMORY_AT(0xC0000000);`
gcc 版
- 修改鏈接文件
/* Program Entry, set to mark it as "used" and avoid gc */
MEMORY
{
CODE (rx) : ORIGIN = 0x08000000, LENGTH = 1024k /* 1024KB flash */
RAM1 (rw) : ORIGIN = 0x20000000, LENGTH = 192k /* 192K sram */
RAM2 (rw) : ORIGIN = 0x10000000, LENGTH = 64k /* 64K sram */
SDRAM (rw): ORIGIN = 0xC0000000, LENGTH = 8092k /* 1024KB sdram */
}
SECTIONS
{
... /* 忽略其它內容 */
.sdram :
{
KEEP(*(.sdram_section))
} >SDRAM
}
- 定義一個宏
#ifndef __MEMORY_AT
#define __MEMORY_AT(x) __attribute__((section(".#x")))
#endif
- 使用 `uint8_t blended_address_buffer[480*272*2] __MEMORY_AT(sdram_section);`
gcc 版本是把變量分配到某 section ,距離地址還有查一點兒。當多個變量放到同一個 section 的時候,它們的順序就不保證了。這種情況只能多定義一些 section。
Q11. 結構體字節對齊
__packed struct __packed_struct{
...
};
struct __attribute__((packed)) __packed_struct{
...
};
struct __packed_struct{
...
} __attribute__((packed));
#pragma pack(push, n)
struct __packed_struct{
...
};
#pragma pack(pop)
keil 里可以這么寫,其它開發環境下有差異。gcc 不支持 `__packed` 的寫法
最后的寫法,可以指定按照 n 個字節對齊,n 是一個具體是常數,常用的有 1 2 4 8 ...
Q12. unaligned access 是怎么出現的?
據我所知,當取指令的時候要求比較嚴格,編譯器也往往把指令做了對齊處理。如果出現非對齊訪問,多半是 pc 指針異常了。
還有一種情況,有人說 ARMv7-M 架構設計的時候,0xC0000000-0xDFFFFFFF 這個地址段默認要求必須 4字節(數據總線寬度)對齊訪問。如果這片內存有個壓縮的結構體變量,對此變量讀寫也可能出現 unaligned access 錯誤。解決方法如下:
1. 修改 MPU 讓這個區域變成正常儲存器
/* Configure the MPU attributes as WT for SRAM */
LL_MPU_ConfigRegion(LL_MPU_REGION_NUMBER1, 0x00, 0xC0000000UL,
LL_MPU_REGION_SIZE_16MB | LL_MPU_REGION_FULL_ACCESS | LL_MPU_ACCESS_NOT_BUFFERABLE |
LL_MPU_ACCESS_NOT_CACHEABLE | LL_MPU_ACCESS_NOT_SHAREABLE | LL_MPU_TEX_LEVEL1 |
LL_MPU_INSTRUCTION_ACCESS_DISABLE);
2. 映射 SDRAM 到別的地址.(0x60000000, 如果你外掛 NOR Flash,這個方法行不通)
RCC-> APB2ENR | = RCC_APB2ENR_SYSCFGEN;
SYSCFG-> MEMRMP | = SYSCFG_MEMRMP_SWP_FMC_0;
3. 取消未對齊訪問檢測
編譯器添加 `–no_unaligned_access` 編譯選項。
有人介紹這個選項的時候說“強制編譯對齊”或者“禁用未對齊訪問支持”,個人認為這種說法不正確,因為,結構體還是按照咱們的想法按照字節對齊的,只是在訪問這個數據的時候換了種方式,不用4字節(數據總線寬度)對齊的方式訪問了。添加這個選項,恰恰是支持了未對齊數據訪問。
支持未對齊數據訪問的基于 ARM 體系結構的處理器,包括:
- 基于 ARMv6 體系結構的所有處理器
- 基于 ARMv7-A 和 ARMv7-R 體系結構的處理器。
不支持未對齊數據訪問的基于 ARM 體系結構的處理器,包括:
- 基于 ARMv6 以前版本的體系結構的所有處理器
- 基于 ARMv7-M 體系結構的處理器。
Q13. STM32F767 怎么使用 PersimmonUI?
不止 STM32F767,可以使用 PersimmonUI 芯片可以很多,詳情見獨立文章 STM32F767 使用 PersimmonUI 及其它芯片使用可行性分析
結束語
本人能力有限,文中難免有錯誤,或者方法錯誤。望各位同仁不吝賜教。
拜謝拜謝
此寶典不定期更新,希望有朝一日能破萬條。
審核編輯:湯梓紅
-
內核
+關注
關注
3文章
1363瀏覽量
40228 -
SDK
+關注
關注
3文章
1026瀏覽量
45779 -
RT-Thread
+關注
關注
31文章
1272瀏覽量
39924
發布評論請先 登錄
相關推薦
RT-Thread記錄(二、RT-Thread內核啟動流程)
RT-Thread編程指南
RT-Thread用戶手冊
RT-Thread Smart 上手指南

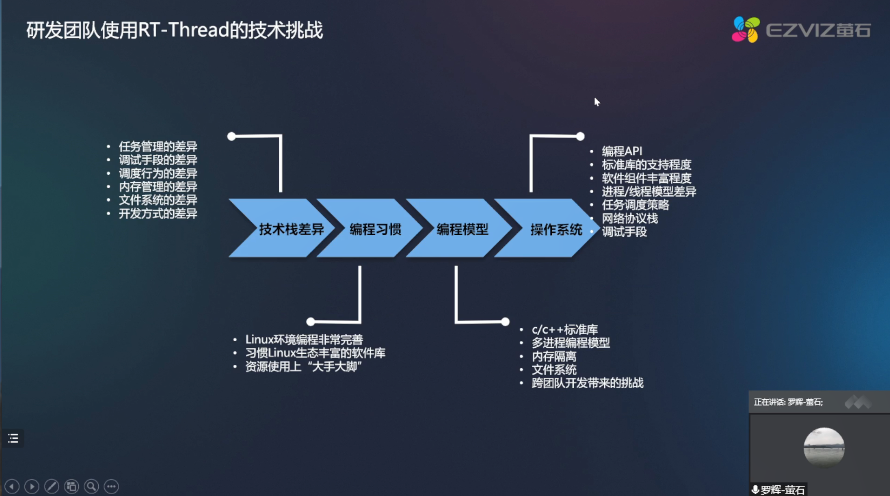
RT-Thread全球技術大會:螢石研發團隊使用RT-Thread的技術挑戰
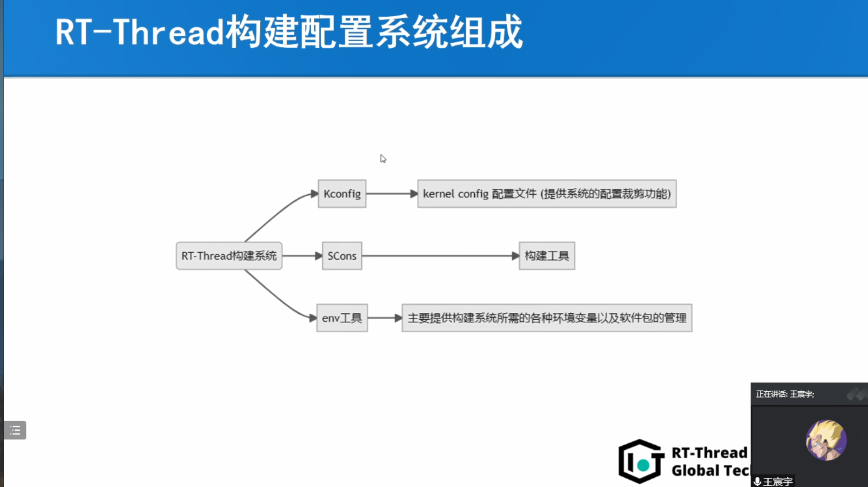
RT-Thread全球技術大會:Kconfig在RT-Thread中的工作機制
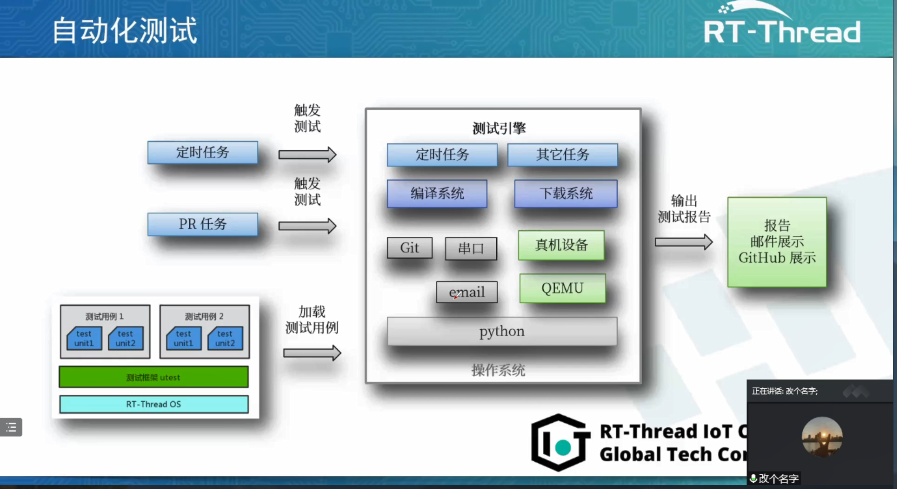
RT-Thread全球技術大會:在RT-Thread上編寫測試用例
RT-Thread全球技術大會:RT-Thread測試用例集合案例
RT-Thread學習筆記 RT-Thread的架構概述

RT-Thread文檔_RT-Thread 潘多拉 STM32L475 上手指南

RT-Thread v5.0.2 發布






 工商網監
工商網監
評論