 基于VCSEL陣列和MPPC陣列的遠距離高速激光成像系統
基于VCSEL陣列和MPPC陣列的遠距離高速激光成像系統
據麥姆斯咨詢報道,近期,復旦大學信息科學與工程學院劉克富教授課題組開發了一套基于2×6 VCSEL陣列和32×32 MPPC陣列圖像傳感器的激光成像樣機,完成了距離標定,并進行了相關實驗研究。該系統的幀頻可達10kHz,120m范圍內的探測概率可達86.23%,在不同反射率下的最大漂移誤差約為0.6m。在70m左右的距離能夠實現車輛的3D成像,水平空間分辨率小于5cm。通過計算直方圖質心,十次拍攝(車牌)的平均測距精度在10cm以內。通過時間門控方法(time-gating method)可以提高探測概率。經過多次測量,在陽光下能夠實現120m透窗激光成像。
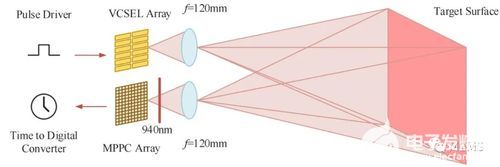
激光成像系統模塊圖
激光雷達(LiDAR)是一種3D成像技術,廣泛應用于增強現實(AR)、汽車、機器視覺、航天器導航和著陸等許多領域。泛光照明方案是一種使用非掃描激光成像方法的閃光式激光雷達(Flash LiDAR),可以獲取目標場景的3D圖像(關鍵輸出內容)。Flash LiDAR成像原理類似于閃光式相機,即通過測量激光到目標表面每個像素的飛行時間來重建3D空間中的目標圖像,激光陣列發射以在短時間內照亮整個視場,然后高靈敏度陣列探測器收集回波信號以構建3D圖像。該成像技術具有成像速度快、體積小的優點,其圖像分辨率取決于探測器的像素總數,橫向分辨率取決于相鄰像素的間距。
2013年,Niclass開發了一種具有32像素的數字多像素光子計數器(digital multi-pixel photon counter,MPPC)陣列,每個像素由6×2單光子雪崩二極管(single photon avalanche diode, SPAD)組成,這是第一個專門為LiDAR應用設計的具有背景魯棒性的陣列。通過1D掃描,其實現了340×90的圖像分辨率、170°×4.5°的視場(FoV)、0.5°×0.05°的角分辨率和10Hz的幀頻。
2017年,Perenzoni設計了一款基于64?×?64 2D陣列MPPC探測器(每個像素包含8個SPAD)的閃光式成像LiDAR,其最大成像距離為367m,測量精度為20cm,幀頻為7.7Hz。
2019年,Hutchings設計了一種256×256 SPAD陣列,可以在光子計數模式下工作,每個像素包含4×4 SPAD,其實現了50m的最大探測距離、1.2°×1.2°的FoV、0.02°×0.02°的角分辨率和30Hz的幀頻。
2020年,Seo使用63通道線陣MPPC探測器(每個像素包含4個SPAD)設計了一種最大探測距離為48m、探測精度為0.85cm、視場角為120°的1D掃描激光雷達,其角分辨率為0.05°×0.2°,圖像分辨率高達2200×36,幀頻為1.18Hz。
2021,Padmanabhan設計了一種256×128 SPAD陣列,可以在光子計數模式下工作,形成一種16×16 SPAD陣列,其探測距離為10m,視場角為2°×2°,角分辨率為0.16°×0.16°,最大圖像分辨率可達128×12。
2021年,Kumagai設計了一種183×600 SPAD陣列,可以在3×4或4×4聚合模式下工作,探測距離高達300m,精度為30cm,視場為25.2°× 9.45°,角分辨率為0.15°×0.15°,圖像分辨率最高可達168×63。其在行場掃描模式下工作,一次掃描一行,幀頻為20Hz。
理論上,與單點激光測距系統相比,Flash LiDAR激光發射能量需要增加數倍來補償。因為這種方案在像素之間的無效區域中存在不必要的激光能量損耗,可以稱為“野蠻”方案。為實現遠距離3D成像,解決回波功率密度低的問題,復旦大學的研究人員從三個方面給出了提高探測概率和探測精度的方法。
首先,通過減小視場角,使激光發射聚焦在較小的區域,以便激光脈沖在相同功率下可以傳輸得更遠。通過改變焦距,激光雷達可以適應不同的探測范圍。
其次,激光收發器采用垂直腔面發射激光器(VCSEL)陣列和MPPC陣列,以組成一種收發器陣列,既增加了發射功率,又增加了接收面積,因此可以在距離較遠和回波信號較弱的情況下探測光子。
最后,采用時間門控方法進一步抑制背景輻射的影響,從而最大限度地利用每次發射的激光功率,并在信號統計處理后延長激光探測距離。
研究人員采用的是由12個VCSEL芯片組成的2×6 VCSEL陣列模塊。每個芯片中有110個發射孔,因此發射孔總數為1320個。經透鏡均勻化后,輸出光束形狀接近正方形。
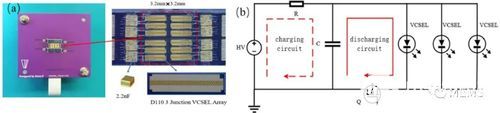
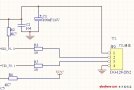
(a)VCSEL陣列模塊;(b)VCSEL驅動電路示意圖
MPPC陣列探測器采用日本濱松(Hamamatsu)產品,型號為S15013-0125NP-01,由32×32通道MPPC組成,每個MPPC包含12個SPAD,每個通道分別與時間數字轉換器(TDC)電路集成,分辨率為312.5ps。
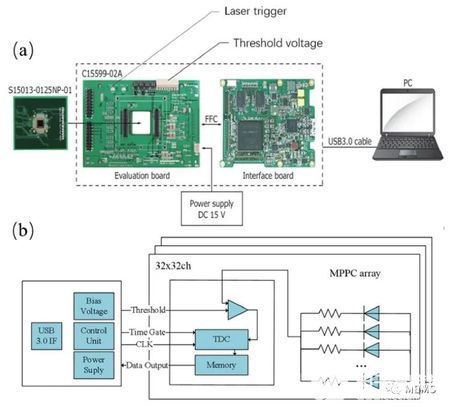
(a)MPPC陣列及其評估電路;(b)評估板連接框圖
這項研究采用帶940nm窄帶濾光片(FWHM?=?10nm)的同軸光收發器。該收發器中的透鏡焦距可調,最大焦距達120mm,光學孔徑為46mm。由于32×32 MPPC陣列的感光面積約為4mm×4mm,根據幾何光學的基本原理,該成像系統在120m處的探測面積約為4m。
研究人員從以下六個方面對激光成像系統進行了實驗研究:
1、動態閾值對探測概率的影響
2、激光強度對激光成像的影響
3、回波激光強度對探測概率的影響
4、目標反射率對漂移誤差的影響
5、無時間門控的車輛激光成像
6、強背景光下的時間門控激光成像
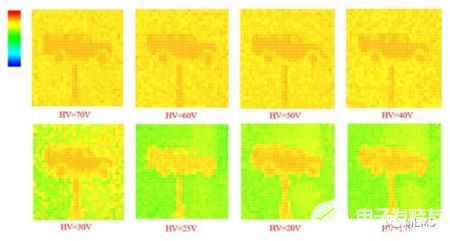
不同激光強度下TDC數據的偽彩色顯示
相關實驗結果表明,該激光成像系統的幀頻可以達到10kHz,通過將閾值設置為1p.e,120m距離的探測概率可以達到86.23%,在衰減比為1000×的情況下,探測概率下降到1.40%。由于多次發射激光可以提高探測能力,因此計算出系統的探測范圍可以達到1km,探測概率不低于1%,對于10kHz的激光重復頻率,幀頻可以達到100Hz。在不同反射率下,激光成像系統的漂移誤差在0.6m以內。漂移誤差主要受激光脈沖寬度和光強的影響,進一步減小激光脈沖寬度和增加激光輸出功率將有助于減少漂移誤差。在70m左右距離能夠實現車輛的3D成像,水平空間分辨率小于5cm,通過計算直方圖的質心,十次拍攝(車牌)的平均測距精度在10cm以內。使用時間門控方法可以提高探測概率。經過多次測量,在陽光下能夠實現120m的透窗激光成像。
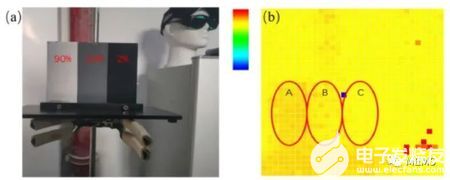
(a)漂移誤差實驗平臺;(b)TDC數據的偽彩色顯示
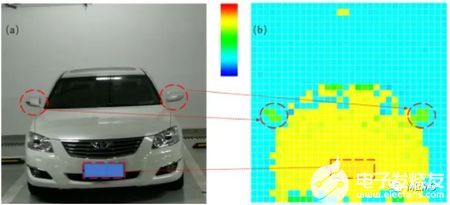
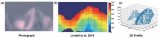
(a)近距離車輛CMOS攝像機成像;(b)TDC數據的偽彩色顯示
該激光成像系統具有體積小、重量輕、探測速度快等優點,可用于自動駕駛儀和航天器飛行控制領域。其高速和高靈敏度的特性還可以進一步開發其他潛在應用,這將有助于促進該技術的不斷發展。

銀月光科技深耕健康智慧光源,向市場提供全品類紫外UVA UVB UVC LED,紅外IR LED VCSEL產品和方案服務,在國內外市場擁有數百家優質合作伙伴,共同推動用光科技創造健康智慧生活的事業。
審核編輯:湯梓紅
-
圖像傳感器
+關注
關注
68文章
1886瀏覽量
129464 -
VCSEL
+關注
關注
17文章
260瀏覽量
29972 -
成像系統
+關注
關注
2文章
194瀏覽量
13913 -
激光雷達
+關注
關注
967文章
3943瀏覽量
189627
發布評論請先 登錄
相關推薦
自動駕駛激光雷達新型探測器:近紅外MPPC

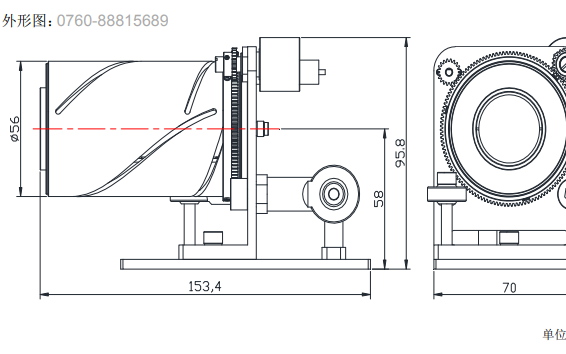
YS-LAS-01遠距離激光照明鏡頭的數據手冊免費下載
中科院成功驗證調頻連續波遠距離成像的能力
MicroVision遠距離汽車激光雷達性能可期
Lumentum新款多結VCSEL陣列提高了性能標準
中國科學技術大學實現超過200公里的遠距離單光子三維成像






 工商網監
工商網監
評論