 無人機遙感數據處理與滑坡信息提取
無人機遙感數據處理與滑坡信息提取
滑坡信息提取與分析
1.多尺度分割與參數的選擇
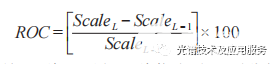
無人機遙感獲取的影像具有較高的分辨率,而傳統的基于像元的分類結果會產生椒鹽效應,分類精度低,而面向對象分類方法綜合利用了光譜信息、紋理信息、空間形態結構和上下文等多源信息, 分類精度較高,更適合高分辨率的無人機影像。本文采用 ESP (Estimation of Scale Parameters)工具輔助影像分割 來獲取最佳的分割尺度,ESP工具是通過引入局部方差(Local Variance, LV)指數來反映分割結果的均質性,其中LV指數代表分割單元的內部標準差,隨著分割單元的增大而增加,達到某一范圍LV指數便不會增加,該尺度可能為最佳分割尺度。但LV指數所對應的尺度閾值不易從圖像上觀察到,因此通過變化率(RateofChange,ROC)參數來表征(式(3)),其中ScaleL代表L層所對應的LV參數值,ScaleL-1代表更低一層所對應的LV參數值,運用ESP 工具得到計算結果如圖5所示,圖1中ROC的極大值可能代表地物信息提取的最佳分割尺度,根據實驗結果并結合目視解譯,最終選定分割尺度為320。
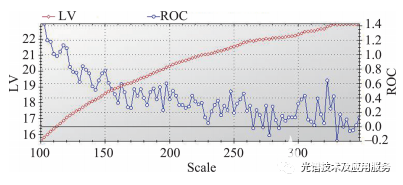
圖1 ESP工具計算結果
為了更好地將地形與地貌信息納入到分割體系中,因此加入了DEM和坡度影像參與分割。在均值因子的選擇上,形狀因子過大會制約光譜信息,緊密度過大會使得分割結果的邊緣形成鋸齒狀區域。為了獲取最佳的分割結果,本文通過充分的實驗,確定光譜權重中紅光波段、綠光波段、藍光波段、DEM、坡度影像分別占比例為1:1:1:0.2:0.2,分割尺度為320,形狀因子為0.2,緊密度為0.4,通過上述參數進行分割時,獲取的分割對象大小適中,內部光譜差異小,不同類別間邊界清晰。
2. 基于模糊分類與決策樹的滑坡信息提取
基于決策樹的分類方法具有運算速度快,漏分區域少的優勢,而決策樹的構建方式以及每個節點分類算法和參數的選擇是研究的重點問題。依據 成員函數建立決策樹的分類方法多是基于布爾邏輯陳述(Boolean Logic Statement),通過對待分類單 元賦予1或0來確定歸屬類別的二元硬分類。為了改善二元硬分類的不足,模糊分類的方法應運而生,它是以模糊邏輯(Fuzzy Logic)為理論基礎,采用隸屬度函數來描述模糊的概念,從而將屬于與不 屬于的絕對概念過渡到相對概念,避免了人為設定 閾值的主觀性與差異性,更符合客觀真實規律。由于決策樹分類存在著誤差累積的現象,因此在決策 樹的構建方面,最好先將易于區分的類別進行分類,并且在每個節點上選擇合適的分類方法與參考 特征,以提高分類精度。遵循以上規則構建決策樹 (圖2)來實現研究區植被、道路、疑似滑坡區域的信息提取。
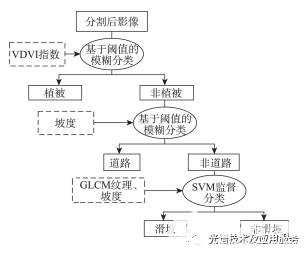
圖2 分類決策樹
(1)植被信息提取
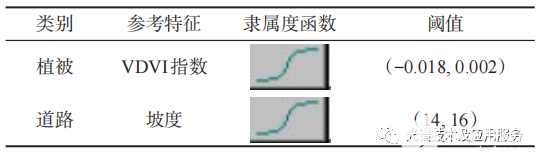
本文研究區內植被覆蓋度較高、邊界清晰,提取難度較小,因此在第1層進行植被提取。VDVI指數對于僅含可見光波段的影像中綠色植被信息具有較好的提取效果,更適用于無人機影像;提取方法選擇基于閾值與隸屬度函數相結合的模糊分類方法,通過選取VDVI指數構造植被的隸屬度函數來實現植被信息的提取。當VDVI指數小于-0.018時地物類型為非植被,當大于0.002時地物類型為植被,因此在(-0.018,0.002)區間構建植被信息的隸屬度函數(表3),通過隸屬的函數值來確定類別的歸屬,通過上述方法將原始影像分為植被與非植被。
(2)道路信息提取
在非植被區域進行下一步的道路信息提取,由于研究區為山區,地勢起伏明顯,而人工修建的盤 山公路坡度平緩,因此依據坡度影像可以實現對道 路的提取,提取的方法選擇基于閾值與隸屬度函數 相結合的模糊分類方法。當坡度小于14°時,影像 對象的地物類型為道路,當坡度大于16°時地物類 型為非道路,因此在(14,16)構建道路信息的隸屬度 函數(表1),通過上述方法可以實現山區公路信息的 提取,從而將非植被區域劃分為道路與非道路區域。
表1 分類規則
(3)疑似滑坡區域的提取
經過前2個步驟已經提取了研究區的植被與道 路信息,下一步需要在非道路區域進行滑坡信息的 提取。在滑坡信息的提取方面,很難設定合適的閾值來實現提取,因此本文通過人工選取樣本點并采用 SVM(Support Vector Machine)分類方法進行分類,SVM具有較強的小樣本學習能力,并且魯棒性 強,是一種優秀的監督分類算法。本實驗在待分類影像區域選擇9個滑坡區域的 樣本點和10個非滑坡區域的樣本點,分別獲得每個樣本區域的8種 GLCM 紋理,并對 8 種紋理值進行歸一化處理,統計結果如圖3所示。
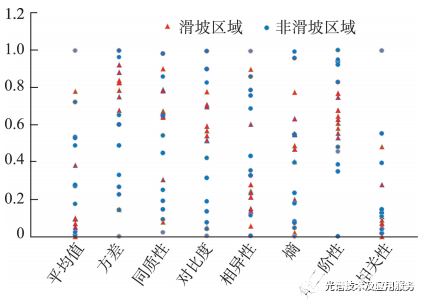
圖3 樣本點的GLCM紋理特征統計
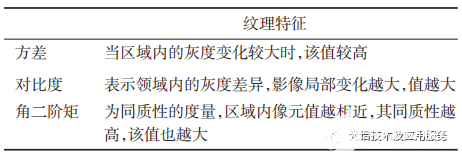
通過比較滑坡區域與非滑坡區域在8種GLCM紋理影像上值的差異,可以發現在方差(Variance)統計值中,滑坡區域集中在0.64-0.81之間,在對比度(Contrast)統計值,滑坡區域集中在0.48-0.79之間,在角二階矩(Angular Second Moment)統計值中,滑坡區域集中在 0.51-0.78 之間,由于滑坡區域主要為堆積的碎石,異質性強于側壁巖石,弱于裸露土壤,因此在以上3種紋理特征中(表 2),滑坡區域與非滑坡區域具有較明顯的分界值,而在其他5種紋理特征中,滑 坡區域與非滑坡區域相混淆。
表2 GLCM紋理特征
人工選取的樣本點在坡度值上也存在著較明顯的分界值,滑坡區域的坡度值主要集中在30°~40°之間,而非滑坡區域主要為側壁巖石和裸露土地,側壁巖石坡度大于45°,而裸露土壤的坡度集中在20°~30°之間。綜上所示,選定方差、對比度、角二階矩與坡度作為分類參考特征,通過人工選擇樣本點的方式,采用 SVM 監督分類算法實現滑坡信息的提取,提取結果如圖4所示。
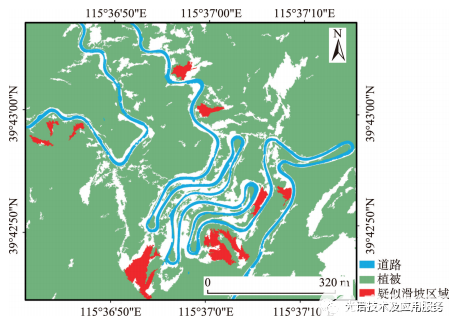
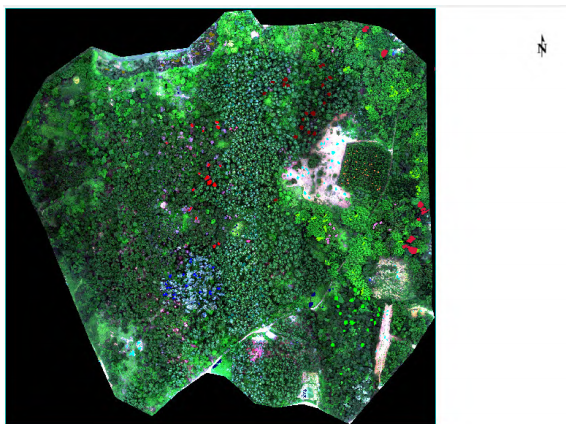
圖4 研究區信息提取結果
3.3重點滑坡區域的形態分析和精度評價
通過前文介紹的信息提取方法,可以將研究區的植被、道路、疑似滑坡區域很好地提取出來,其中疑似滑坡區域大部分為堆積的碎石,結合滑坡的空間位置以及公路的分布特征,可以發現區域A(圖9) 具有較高的風險等級。為了更準確地對區域 A 進行滑坡形態與紋理的分析,本文獲取了基于滑坡表面的投影影像,其中投影面的位置如圖5所示。
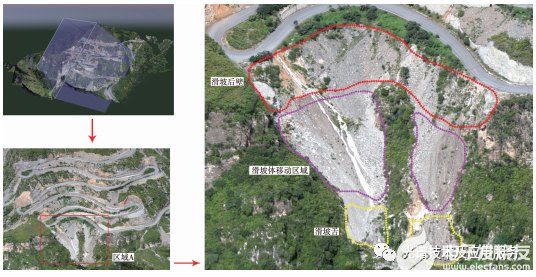
圖5 重點滑坡區域的投影影像以及滑坡形態分析
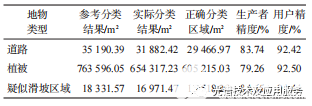
結合前文獲取的DEM與坡度數據,可以發現該區域在形態方面,斜面上出現馬蹄形狀的洼地,形狀與周圍區域明顯不協調,在斜坡面形成上部陡峭中部平緩下部陡峭的折線狀地形,其中上部區域平均坡度為37°,中部區域為26°,下部區域為34°,滑坡后壁較陡,中間有一個較平緩的核心臺階。該區域的 巖石類型主要為施工遺留的碎石,在重力作用下呈 流態分布于滑坡表面,結構上較為松散,與周圍未 滑動的整塊巖石具有明顯的差異。本文采用用戶精度,生產者精度作為評價指標,其中分類結果的精度評價如表5所示。結果表明本文的方法具有較高的精度,3種主要地物類型中生產者精度在80%左右,用戶精度在90%左右,其中重點提取的滑坡區域用戶精度為91.44%,生產者精度為84.65%。
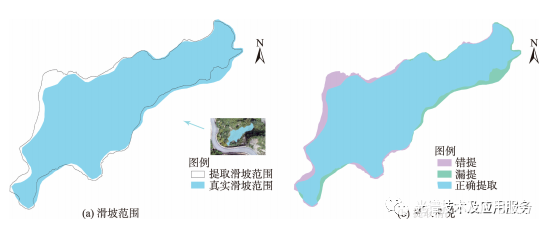
圖6 精度評價方法示意圖
表3 分類結果精度評價
4 結論與展望
針對研究區的滑坡信息提取要求,利用無人機遙感平臺,采取傾斜拍攝與支持拍攝相結合的影像獲取方式,結合攝影測量基本原理與計算機視覺算法,得到了高精度的DOM與DEM數據,通過面向對象方法實現了研究區滑坡信息的提取。具體結論如下:
(1)利用無人機遙感平臺獲取的影像有效地保留了光譜與紋理信息,并結合野外測量的控制點保證了位置精度,采用影像匹配、相對定向、光束法平差以及數字微分糾正的方法,獲取了研究區的DEM與DOM,通過對影像的精度驗證,證明本文的研究方法適用于無人機影像的獲取與處理。
(2)確定了DOM影像分割的最佳尺度,結合研究地物的光譜、紋理以及形態特征,構建了基于模糊分類與SVM算法相結合的決策樹,實現了滑坡信息的提取。并對提取的滑坡區域進行了形態與紋理的分析以及精度評價,其中滑坡提取的用戶精度為91.44%、生產者精度為84.65%,證明本文的提取方法具有較高的精度與應用價值。本文雖然獲得了研究區高分辨率和高精度的DEM和DOM數據,但是影像的覆蓋面積較小,無法實現大范圍的滑坡信息提取與監測,其主要限制在于無人機的續航問題,今后將大幅度地提升續航能力,以便實現大區域的滑坡信息提取與監測。
萊森光學(深圳)有限公司是一家提供光機電一體化集成解決方案的高科技公司,我們專注于光譜傳感和光電應用系統的研發、生產和銷售。
審核編輯 黃昊宇
-
無人機
+關注
關注
228文章
10338瀏覽量
179612 -
遙感數據
+關注
關注
0文章
14瀏覽量
7223
發布評論請先 登錄
相關推薦
無人機全景監測:空域管理的新革命
高精度晶振是各大廠商無人機遙感技術大PK的關鍵
無人機遙感系統的研究進展與應用前景
無人機遙感技術的特點及應用
關于無人機遙感技術的全面介紹
無人機遙感技術簡介及實例應用
無人機傾斜攝影在滑坡上面使用情況
無人機高光譜數據處理與建模方法
無人機遙感數據的處理與滑坡信息提取
基于無人機高光譜遙感的森林可燃物分類方法研究-萊森光學





 工商網監
工商網監
評論