") DOE中的“已編碼系數(shù)”和“以未編碼單位表示的回歸方程”
DOE中的“已編碼系數(shù)”和“以未編碼單位表示的回歸方程”
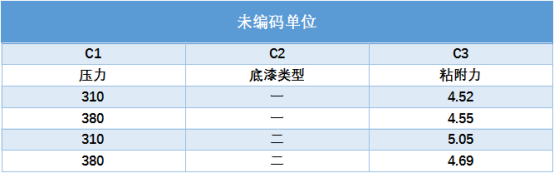
什么是編碼單位和未編碼單位?
編碼單位和未編碼單位定義實驗設計中的因子水平。例如,您要確定哪種壓力設置與底漆類型的組合能夠獲得最優(yōu)的涂層附著力。實驗中的低設置(壓力 = 310,底漆類型 = 一)由采用編碼單位的 -1 標識,高設置(壓力 = 380,底漆類型 = 二)由采用編碼單位的 1 標識。
注:如果實驗中有中心點處實驗,則中心點的編碼單位用0標識
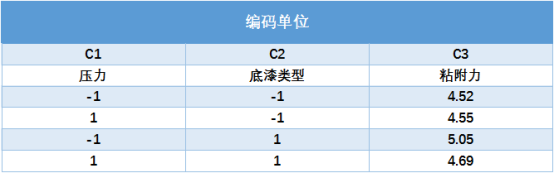
默認情況下,Minitab 使用編碼單位來執(zhí)行分析。
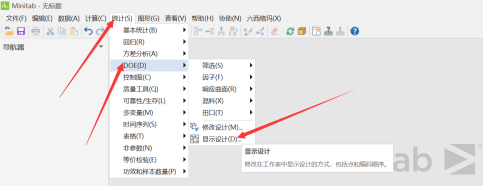
未編碼與已編碼的互相轉換
在Minitab 19中的路徑:統(tǒng)計-DOE-顯示設計

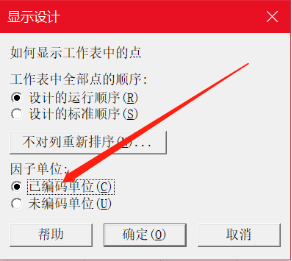
在“顯示設計”的因子單位改選為“已編碼單位”

我們也可以手動計算實現(xiàn)編碼和未編碼的轉換(詳見藍寶書P505)。
編碼值=(未編碼值-M)/ D
未編碼值=M+D*編碼值
其中,中心值M=(高+低)/ 2
板間距D =(高-低)/ 2
我們以已編碼工作表第一行的加熱溫度0為例,把它轉換為未編碼值(加熱溫度高水平860,低水平820)。
M=(高+低)/ 2=(860+820)/ 2=840
D=(高-低)/ 2 =(860-820)/ 2 =20
未編碼值=M+D*編碼值=840+20*0=840
DOE中的以編碼系數(shù)與未編碼回歸方程
在實驗設計的分析結果中,我們會看到以下兩個輸出:
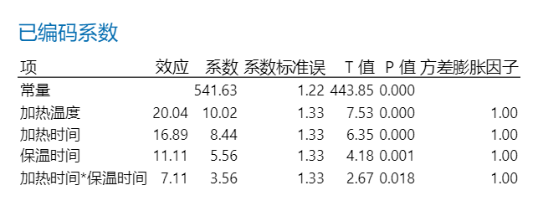

“已編碼系數(shù)”表,可以幫助我們用來確定哪些項對響應具有統(tǒng)計意義顯著的效應。要確定響應與模型中每個項之間的關聯(lián)在統(tǒng)計意義上是否顯著,請將該項的 P 值與顯著性水平進行比較以評估原假設。原假設聲明該項的系數(shù)等于零,這意味著該項與響應之間沒有關聯(lián)。通常,顯著性水平(用 α 或 alpha 表示)為 0.05 即可。顯著性水平 0.05 指示在實際上不存在關聯(lián)時得出存在關聯(lián)的風險為 5%。
P 值 ≤ α:關聯(lián)在統(tǒng)計意義上顯著
如果 P 值小于或等于顯著性水平,則可以得出響應變量與項之間的關聯(lián)在統(tǒng)計意義上顯著的結論。
P 值 > α:關聯(lián)在統(tǒng)計意義上不顯著
如果 p 值大于顯著性水平,則無法得出響應變量與該項之間的關聯(lián)在統(tǒng)計意義上顯著的結論。您可能希望重新擬合沒有該項的模型。
如果多個預測變量與響應在統(tǒng)計意義上沒有顯著的關聯(lián),則可以通過刪除項(一次刪除一個)來簡化模型。
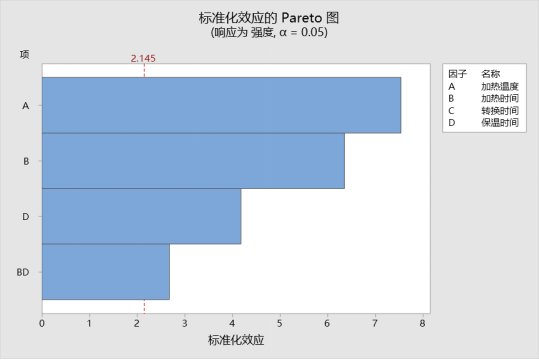
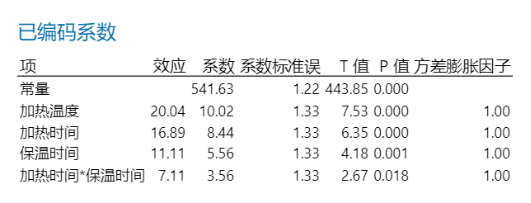
在該“已編碼系數(shù)”表中,我們看到每項的P值都是小于0.05,也就是說這些項都是顯著的,需要在最終模型中保留。我們也可以借助效應Pareto圖得到相同的結論。
而我們在上面看到的另外一個輸出“以未編碼單位表示的回歸方程”其實是根據(jù)“已編碼系數(shù)”表轉換而來。下面我們來說明這兩者的轉換過程。
在轉換之前我們首先來理解一下“已編碼系數(shù)”表中的各項系數(shù)是怎么來的。
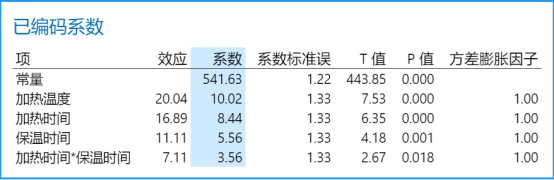
系數(shù)用于描述模型中的項和響應變量之間關系的大小和方向(要最小化各項之間的多重共線性,所有系數(shù)都需采用編碼單位。)一個項的系數(shù)表示在其他項保持恒定時,與該項中一個編碼單位的增長相關聯(lián)的平均響應的變化。系數(shù)的符號表明項與響應之間關系的方向。
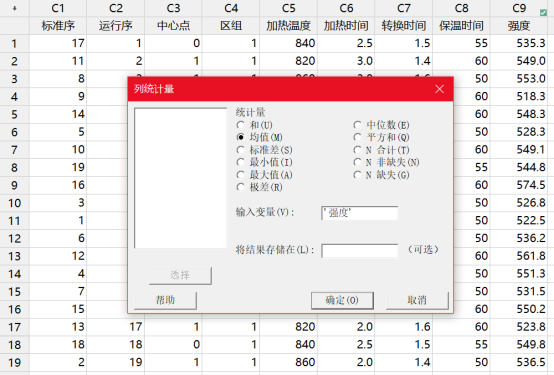
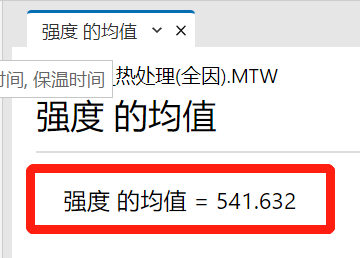
系數(shù)的大小是效應大小的一半。效應表示當因子水平由低變高時預測平均響應中的變化。也就是說各項的系數(shù)=(該項因子在高水平的響應均值-該項因子在低水平的響應均值)/2.,其中“常量項的系數(shù)大小為所有響應值(C9列)的平均值。那么下面我們先來求一下“常量”項的系數(shù)。
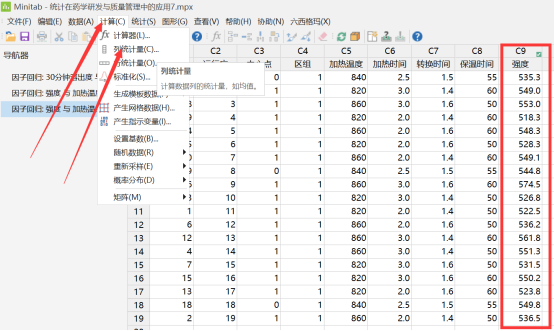
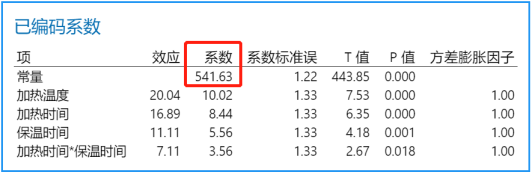
而各因子項和因子交互作用項的系數(shù)就是對應項的效應值一半,比如,在該“已編碼系數(shù)”表中加熱溫度項的效應值20.04(加熱溫度的效應值是以下工作表中紅色列對應的強度均值-綠色列對應的強度均值)。
( ( ( ( ( ( ( 553 + 548.3 ) + 549.1 ) + 574.5 ) + 536.2 ) + 561.8 ) + 551.3 ) + 536.5 ) / 8 - ( ( ( ( ( ( ( 549 + 518.3 ) + 528.3 ) + 526.8 ) + 522.5 ) + 531.5 ) + 550.2 ) + 523.8 ) / 8=20.0375
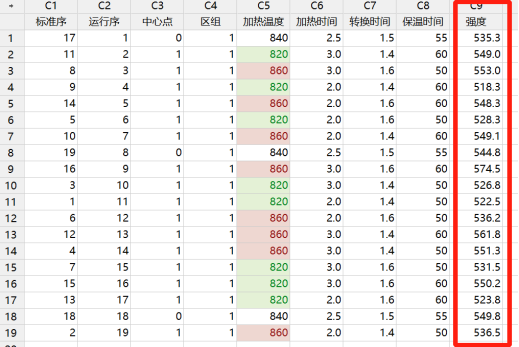
效應20.04的一半,所以加熱溫度的系數(shù)則為10.02,其他項的計算也是如此,不再贅述。
理解了效應和系數(shù)的計算后,我們現(xiàn)在來把“已編碼系數(shù)”表轉換為“以未編碼單位表示的回歸方程”。
強度 = 541.63 + 10.02 * ( 編碼的加熱溫度 ) + 8.44 * ( 編碼加熱時間 ) + 5.56 * ( 編碼保溫時間 ) + 3.56 * ( 編碼加熱時間 * 編碼保溫時間 )
其中編碼的加熱溫度=(溫度值-M)/ D, 具體計算過程見本文前面內(nèi)容。所以:
強度=541.63+10.02 * [ ( 加熱溫度-840 ) / 20 ]+8.44 * [ ( 加熱時間-2.5 ) / 0.5 ] + 5.56 * [ ( 保溫時間-55 )/5 ] + 3.56 * [ ( 加熱時間-2.5 ) / 0.5 ] * [ ( 保溫時間-55 ) / 5 ]
手算結果為:強度=213.23+0.501加熱溫度-61.44加熱時間-2.448保溫時間+1.424加熱時間*保溫時間
與Minitab的“以未編碼單位表示的回歸方程”結果比較一下

結論
如果你想更好的理解DOE中的分析結果,找個例子手算看看,會加深你的印象。當然有Minitab的幫助你也可以直接忽略計算過程。學習了DOE中的已編碼和未編碼,那你知道編碼的作用嗎?
審核編輯 黃昊宇
-
Minitab
+關注
關注
0文章
164瀏覽量
11661 -
DOE
+關注
關注
0文章
38瀏覽量
12963
發(fā)布評論請先 登錄
相關推薦
編碼器在機器人技術中的應用 編碼器在傳感器系統(tǒng)中的作用
風華貼片電容物料編碼如何看?

增量編碼器和絕對值編碼器是什么

如何實現(xiàn)比較器以提高工業(yè)驅動應用中旋轉編碼器的性能

電機控制系統(tǒng)中的編碼器概述與作用
直接型IIR濾波的差分方程和系數(shù)結算
AGV輪轂電機中的編碼器

編碼器在機器人系統(tǒng)中的應用
編碼器分辨率是什么意思 編碼器分辨率和脈沖數(shù)的關系






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論