 分辨率角度分析鏡頭在光學系統中的重要性
分辨率角度分析鏡頭在光學系統中的重要性
前言
在機器視覺領域,可以把各個部件劃分為光源,鏡頭,相機,采集卡,算法,運動平臺等。各個部件都是系統的有機組合,均有各自的重要性。在實際應用中,成像鏡頭涉及的光學理論較多,在選型過程比較繁瑣。不少擁有多年機器視覺行業經驗的工程師依然會對成像鏡頭在光學系統中的作用感到困惑。
本文嘗試從分辨率角度分析鏡頭在光學系統中的作用解釋鏡頭的重要性。
系統分辨率與像素精度
機器視覺系統最重要的參數是系統分辨率。工程師運用各種理論與技巧,目標就是要提高系統精度。因為一個設備的系統分辨越高,價值越大。一般來說,工程師習慣使用像素精度來表示系統分辨率。
像素精度的概念很簡單,即單個像素代表的物理尺寸。
例如相機的像素為10*10,被測物為100mm*100mm,即每個像素代表的物理尺寸為:100mm/10=10mm/像素。
按照這個邏輯,提高系統精度的方法就是提高單位面積的像素比例。
如被測物還是100mm*100mm,相機像素提升為100*100,即每個像素代表的物理尺寸為:100mm/100=1mm/像素。
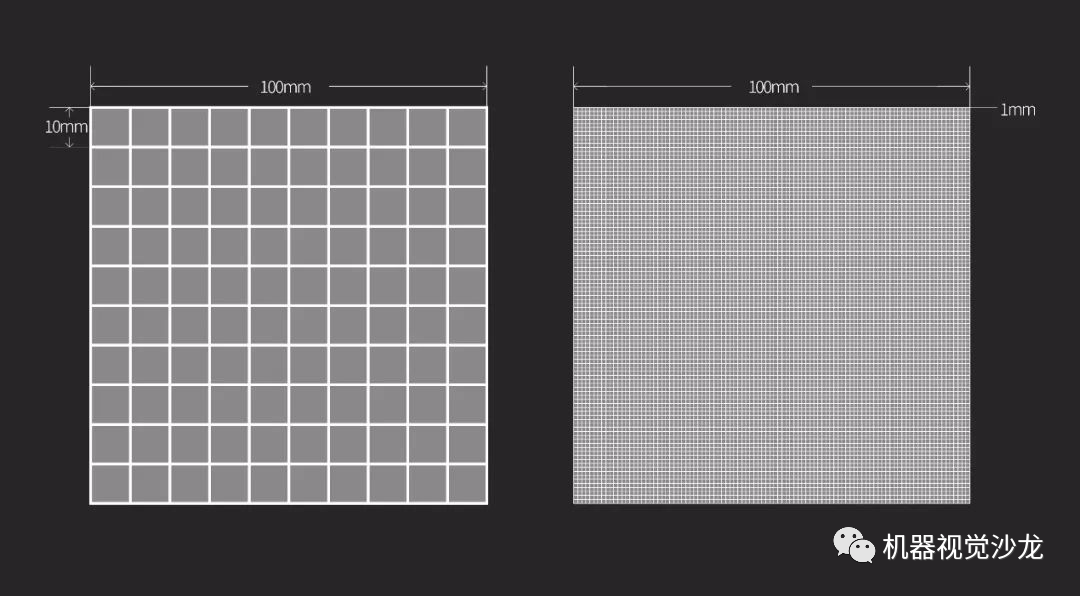
圖1:同一個FOV下像素精度的變化
如果按照這個邏輯,單位面積無限增加像素比例,光學系統的精度可以無限提高?
答案顯然是不可能的,那這個限制在哪呢?
系統分辨率的“木桶理論”
可以用“木桶理論”來考慮這個問題。光學系統的分辨率(光學分辨率)和相機的圖像分辨率是整個成像系統分辨率這個“木桶”上的兩塊“木板”;成像系統的分辨率等于這兩塊“木板”中比較短的那塊。
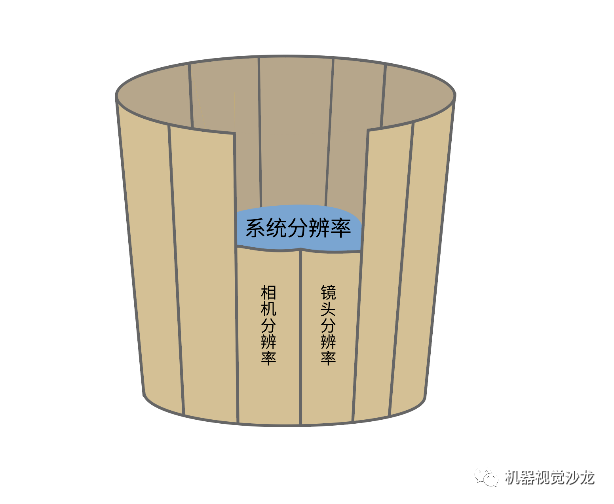
圖2:鏡頭和相機的“木桶理論”
由上述的“木桶理論”可知,存在四種情況:
相機分辨率大于鏡頭分辨率,提升鏡頭分辨率,系統分辨率提升;
相機分辨率大于鏡頭分辨率,提升相機分辨率,系統分辨率不變;
鏡頭分辨率大于相機分辨率,提升相機分辨率,系統分辨率提升;
鏡頭分辨率大于相機分辨率,提升鏡頭分辨率,系統分辨率不變。
平時我們討論的相機與鏡頭之間的關系,其實是相機,鏡頭,系統三者之間的關系。想要理解這三者之間的關系,必須了解分辨率的概念。
相機像元數,相機“像素”與相機分辨率
“像元”“像素”“分辨率”這幾個相機相關的術語,業界目前沒有十分明確的定義,有些行業還會有顯示分辨率,圖像分辨率等等不同的概念,比較容易引起混淆。按照筆者理解,相機是沒有像素的概念,像素是圖像的描述,相機的像元個數等于該相機拍攝的圖像像素個數。
像元,圖像傳感器上能單獨感光的物理單元。
像素,數字圖像中顯示的最小單位。一般相機拍出的圖像才會使用像素的概念。相機“像素”的概念并不準確。
分辨率,指分辨率即分辨兩個靠近的點的能力,也稱為解析力。相機能分辨最小的點就是像元尺寸,可理解為相機的分辨率=像元尺寸。
舉個例子:
相機A配備索尼IMX250芯片。其像元個數為2448*2048,其像元尺寸為3.45μm x 3.45 μm。此相機的像元個數為2448*2048,拍攝的圖片像素為5013504,相機分辨率為3.45μm。
鏡頭“像素”與鏡頭分辨率
為了方便的用戶選購鏡頭,工業鏡頭廠家往往以“像素”命名鏡頭。
如相機A能拍攝500萬像素的圖像,廠家把匹配的鏡頭命名為500萬像素鏡頭。市面上的標清鏡頭,高清鏡頭,1080P鏡頭,均以相機拍攝的圖像像素命名。
但在其他領域,如顯微鏡,內窺鏡,單反鏡頭,卻并沒有出現此種現象。顯然,以“像素”命名鏡頭,并不能準確地描述鏡頭的性能。并且也出現了廠家隨意命名的現象,為我們理解鏡頭分辨率制造了困擾。
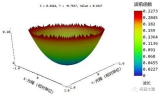
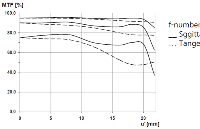
真實的鏡頭分辨率應以MTF曲線體現,圖3為MTF曲線的其中一種表達形式。
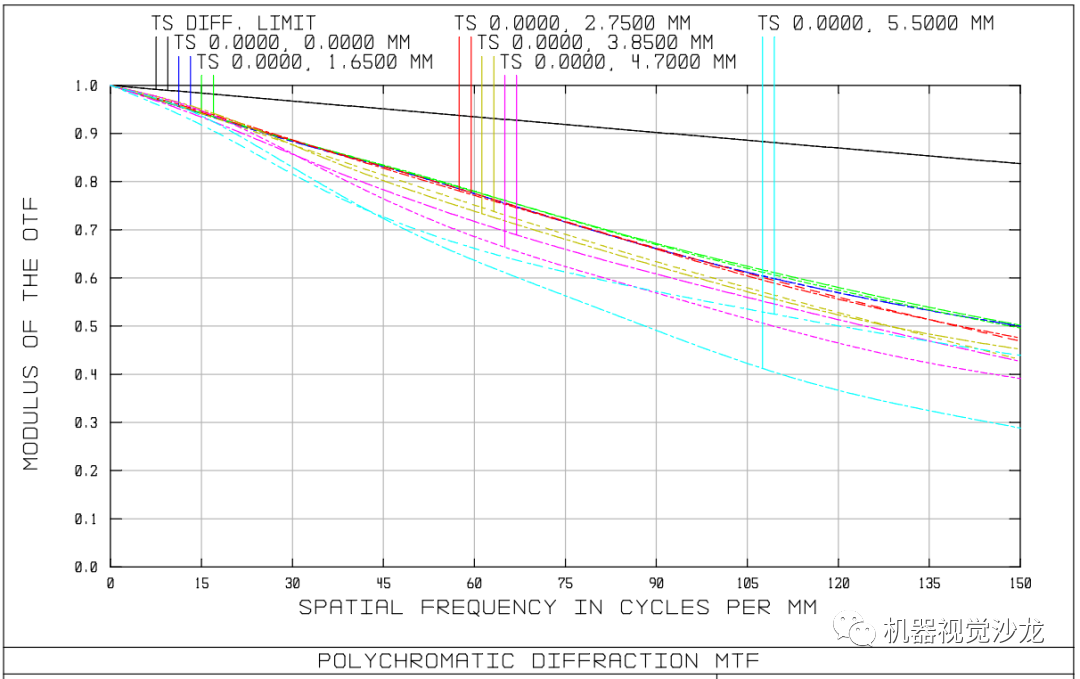
圖3:鏡頭A的MTF曲線圖
此MTF曲線的核心內容則是空間頻率。即要讀懂鏡頭的分辨率,必須先了解空間頻率。
分辨率與空間頻率
分辨率可以用空間頻率進行量化表達。
空間頻率,代表了單位長度內信號的周期數,常用1mm中含有的線對數量表示。一黑一白為1線對。
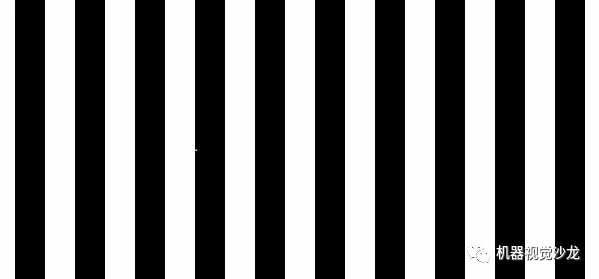
圖4:空間頻率
相機分辨率與鏡頭分辨率可以量化
由上述可知,相機分辨率與鏡頭分辨率,擁有一個通用的參數——空間頻率。換算出相機的空間頻率,就可以量化判斷系統分辨率到底是由“木桶”的哪塊板決定(相機分辨率,鏡頭分辨率)
相機的空間頻率計算公式如下:
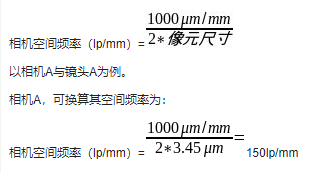
鏡頭A,其空間頻率,查看MTF曲線可知為150lp/mm。
鏡頭A,匹配空間頻率大于150lp/mm的相機時,系統分辨率不變;
鏡頭A,匹配空間頻率小于150lp/mm的相機時,系統分辨率下降。
相機A,匹配空間頻率大于150lp/mm的鏡頭時,系統分辨率不變;
相機A,匹配空間頻率小于150lp/mm的鏡頭時,系統分辨率下降;
在相機分辨率越來越高的時代背景下,成像系統分辨率的“壓力”也就落在了鏡頭上,所以更高分辨率(空間頻率)的鏡頭在成像系統中的作用越來越重要。
鏡頭分辨率與其他參數共同作用影響系統分辨率
鏡頭分辨率除了跟相機分辨率外,還與其他因素關聯,共同影響系統分辨率。
1,鏡頭分辨率是一個變化的參數
對于一個鏡頭,其分辨率不是一個恒定不變的值。不同工作距離,不同光圈,不同工作波段,不同像面位置,鏡頭分辨率會產生變化。
2,鏡頭分辨率與光源
在設計研發時,一般會對特定波段優化鏡頭的分辨率。使用特定波長以外的光源,鏡頭分辨率下降。一般來說,使用特定波段單色光,鏡頭分辨率會提升。
3,鏡頭的像方分辨率與物方分辨率
成像鏡頭的分辨率有多種表達,其中最常用的是像方分辨率與物方分辨率。物方分辨率只是指鏡頭靠近被測物一方的空間頻率,像元分辨率是指靠近相機一方的空間頻率。工業定焦鏡頭一般公開像方分辨率,顯微物鏡更多公開物方分辨率。
4,鏡頭分辨率與工作距離
成像鏡頭的設計主要運用了幾何光學原理,一般會對特定的工作距離進行優化。對工業定焦鏡頭而言,多數產品的最佳工作距離是300mm-600mm,即此工作距離下,鏡頭分辨率表現最佳,其他工作距離,分辨率表現可能會下降。而安防鏡頭的最佳工作距離為遠距離和無窮遠。微距鏡頭的最佳工作距離為近距離。
5,鏡頭分辨率與光圈
在一般應用中,鏡頭分辨率與光圈相關性比較大,減小鏡頭的光圈,分辨率會提高。但是光圈越小,衍射極限的限制也越明顯。
6,鏡頭分辨率存在物理極限
恩斯特·阿貝博士在19世紀70年代就發現了成像鏡頭的分辨率極限。可見光鏡頭的分辨率極限是0.2μm。并且因為材料和工藝問題,一般的成像鏡頭難以達到這個值。
總結
理解成像鏡頭的分辨率(空間頻率)的計算和評判方法,能更好地理解影響系統精度的核心因素,也為系統升級指明方向。
審核編輯:郭婷
-
分辨率
+關注
關注
2文章
1045瀏覽量
41883 -
機器視覺
+關注
關注
161文章
4345瀏覽量
120111
原文標題:光學系統的核心--分辨率
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
高質量激光光束光學系統中的空間濾波
Moritex 5X 高分辨率遠心鏡頭 助力晶圓檢測

工業鏡頭光學系統的成像質量客觀評價
光學系統大口徑攝影鏡頭設計原理
如何檢測光學系統的縱向色差

淺談相機的圖像分辨率


雙波段CCTV魚眼鏡頭光學系統設計
矢量自適應光學技術解析





 工商網監
工商網監
評論