") 自動(dòng)跟蹤算法的追蹤問題解決方案
自動(dòng)跟蹤算法的追蹤問題解決方案
現(xiàn)代 IRST(紅外瞄準(zhǔn)和跟蹤)傳感器可以有效跟蹤敵方目標(biāo)(在意大利,我們擁有出色的 Skyward-G,由 Selex Galileo 開發(fā))。然而,達(dá)到目標(biāo)的問題仍然懸而未決。在本文中,我們提出了一種自動(dòng)跟蹤算法,其中目標(biāo)執(zhí)行回避隨機(jī)游走;另一方面,算法的收斂(即到達(dá)/摧毀目標(biāo))是一個(gè)確定性的過程。
一點(diǎn)歷史
根據(jù)一個(gè)著名的軼事,在 1980 年代,斯德哥爾摩委員會(huì)沒有將諾貝爾獎(jiǎng)授予美國著名物理學(xué)家 R. Dicke,因?yàn)樗麑啄甑穆殬I(yè)生涯致力于實(shí)現(xiàn)紅外傳感器用于研究/跟蹤/殺死移動(dòng)目標(biāo)。更準(zhǔn)確地說,紅外搜索和跟蹤 (IRST) 傳感器檢測(cè)飛機(jī)廢氣發(fā)出的紅外輻射。1950 年代使用的第一個(gè)模型相當(dāng)原始,旋轉(zhuǎn)自由度降低。對(duì)此類探測(cè)器后續(xù)發(fā)展的一個(gè)顯著貢獻(xiàn)來自越南戰(zhàn)爭,這也歸功于迪克的開創(chuàng)性工作:新一代傳感器看到了美國響尾蛇導(dǎo)彈上的光。
維納濾波器和 IRST 傳感器
IRST 傳感器是飛機(jī)尾氣發(fā)出的紅外輻射的探測(cè)器。眾所周知,任何熱物體都會(huì)發(fā)射紅外范圍內(nèi)的電磁輻射。如果這種發(fā)射類似于在溫度T處處于熱力學(xué)平衡狀態(tài)的黑體,如果λ是發(fā)射輻射的波長,我們有位移定律:

其中λ max是發(fā)射功率最大的波長值。從這個(gè)方程可以看出,這個(gè)大小與溫度成反比。在IRST傳感器的實(shí)現(xiàn)中,需要參考一個(gè)溫度范圍(T 1 ,T 2),使波長落在紅外波段。為了更清楚,在圖 1 中,我們報(bào)告了作為無量綱變量hν / kT函數(shù)的發(fā)射功率趨勢(shì),其中h是普朗克常數(shù),k是玻爾茲曼常數(shù),ν = c /λ 是發(fā)射頻率輻射 ( c是光速)。從溫度升高時(shí)繪制的曲線族中,我們看到隨著溫度升高,發(fā)射峰向高頻移動(dòng)。
從操作上講,IRST 傳感器是一種熱像儀,能夠檢測(cè) 2 之間波長范圍的紅外輻射。5 × 10 -8和 11 × 10 -8厘米。然而,主要問題是由于電磁場(chǎng)在紅外范圍內(nèi)在地球大氣層中傳播的能力很差。更準(zhǔn)確地說,紅外光子被大氣中存在的水蒸氣分子吸收。因此,為了獲得良好的效率,它們運(yùn)行的距離不得超過指定的閾值。此外,為了對(duì)目標(biāo)圖像進(jìn)行可能的軟件重建,需要為系統(tǒng)配備維納濾波器。1如果不是這樣,一群鳥很可能被誤認(rèn)為是敵機(jī)。
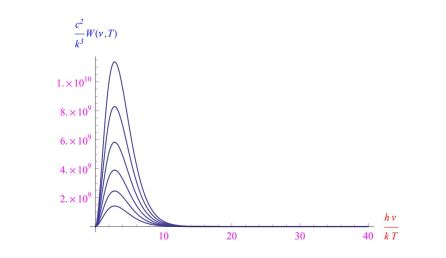
圖 1:黑體在溫度T的熱平衡中發(fā)射的功率密度趨勢(shì)(對(duì)于該量的不同值)作為無量綱變量hν / kT的函數(shù)
動(dòng)態(tài)設(shè)置
地面參考系
動(dòng)態(tài)設(shè)置跟蹤問題意味著編寫運(yùn)動(dòng)微分方程或應(yīng)用牛頓第二定律。因此,有必要指定一個(gè)慣性參考系。由于飛機(jī)速度比表征地球運(yùn)動(dòng)(繞軸自轉(zhuǎn)、繞太陽公轉(zhuǎn))的相應(yīng)運(yùn)動(dòng)學(xué)量高幾個(gè)數(shù)量級(jí),因此可以非常近似地認(rèn)為我們的星球是“靜止的”。因此,讓我們假設(shè)一個(gè)由笛卡爾坐標(biāo)軸組成的 Oxyz 三元組作為參考系統(tǒng) ,假設(shè)地球中心的原點(diǎn)為球形;x 軸在赤道平面內(nèi)并朝向腳 格林威治子午線(腳是子午線與赤道平面的交點(diǎn))。在這種情況下,飛機(jī)的地理坐標(biāo)(緯度和經(jīng)度)和高度可以很容易地轉(zhuǎn)換為笛卡爾坐標(biāo)(x,y,z)。
時(shí)間分辨率和飛機(jī)機(jī)動(dòng)性
在這種動(dòng)態(tài)場(chǎng)景中, 配備 IRST 傳感器的攻擊者(導(dǎo)彈)A 必須檢測(cè)目標(biāo)(戰(zhàn)斗機(jī))B。必須快速連續(xù)執(zhí)行檢測(cè),以便能夠?qū)⑵渌俣仁噶恐赶蛩矔r(shí)位置的目標(biāo)。如果Δt 是表征上述序列的最小時(shí)間間隔,則檢測(cè)到的軌跡是真實(shí)軌跡中的一段。后者顯然是微分幾何意義上的平滑曲線。還必須考慮單個(gè)車輛的機(jī)動(dòng)性。為此,我們用 ( δt) A 和 ( δt) B表示 分別為 A 和 B 的機(jī)動(dòng)時(shí)間。由于戰(zhàn)斗機(jī)比導(dǎo)彈更機(jī)動(dòng),我們預(yù)計(jì)以下雙重不等式:

換句話說,目標(biāo)的航向變化(即規(guī)避機(jī)動(dòng))在攻擊者的時(shí)間尺度上是瞬時(shí)的,并且與Δt相比都小到可以忽略不計(jì)。這種情況表明忽略上述時(shí)間尺度。這相當(dāng)于假設(shè)兩架飛機(jī)都具有無限機(jī)動(dòng)性。最后,為了使問題在數(shù)學(xué)上更易于管理,我們執(zhí)行通過 Δ t → 0 的限制的操作。這相當(dāng)于直接考慮真實(shí)軌跡,將單個(gè)車輛通過一個(gè)質(zhì)點(diǎn)進(jìn)行模式化以忽略旋轉(zhuǎn)自由度。這種方法可能看起來不切實(shí)際,但它構(gòu)成了解決所提出問題的第一個(gè)近似步驟。
IRST 運(yùn)動(dòng)學(xué)
首先,我們觀察到追擊并不自動(dòng)意味著可達(dá)性:攻擊者 A 可以無限期地追擊目標(biāo) B,但從未到達(dá)目標(biāo) B。在任何情況下,重要的是通過以下方式數(shù)學(xué)表達(dá)以下條件逐步進(jìn)行。在圖 2 中,我們報(bào)告了飛機(jī)在通用時(shí)刻 t相對(duì)于地面參考系統(tǒng)的位置,其中 D ( t ) 是 距離向量,其模數(shù)是上述時(shí)刻 A 點(diǎn)和 B 點(diǎn)之間的歐幾里得距離。 但是讓我們通過指定圖中的符號(hào)來嘗試更清楚。
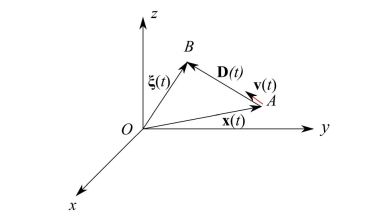
圖 2:飛機(jī)相對(duì)于指定的地面三元組的瞬時(shí)位置
這里,ξ ( t ) 是目標(biāo)的位置向量,即從原點(diǎn)向目標(biāo)瞬時(shí)位置標(biāo)記的向量:

我們用希臘字母來區(qū)分它們與拉丁同音字,我們將用它來表示 A 的坐標(biāo)。實(shí)際上,后者位于

我們不知道目標(biāo)的坐標(biāo),但是追擊的條件是通過強(qiáng)加 A 的速度矢量始終指向 B 的瞬時(shí)位置來表達(dá)的(換句話說,攻擊者沒有預(yù)料到目標(biāo)的移動(dòng)) 。 從向量演算中,我們知道兩個(gè)向量是平行且等價(jià)的當(dāng)且僅當(dāng)它們是成比例的并且比例的標(biāo)量是非負(fù)的:

這個(gè)等式定義了“距離”向量:

其模塊是:

根據(jù)等式 5,我們有:

τ (t)的運(yùn)動(dòng)學(xué)意義 由此而來:這個(gè)量是用速度 v ( t ) 行進(jìn)距離 D ( t ) 所需的時(shí)間。很明顯,A 到達(dá) B 當(dāng)且僅當(dāng)存在一個(gè)瞬間 t * 使得 D ( t * ) = 0 或相同的 τ ( t *) = 0。以下條件由等式 5 表示,而可達(dá)性是一個(gè)更強(qiáng)的條件,在某種意義上,除了前一個(gè)條件之外,在函數(shù) τ (t) 的有限處存在零。 順便說一句,如果正函數(shù)的唯一零在無窮遠(yuǎn)處,則相應(yīng)的成就是漸近的(即,必須經(jīng)過無窮大的時(shí)間)。如果

攻擊者不能接近最小距離。這些考慮提出了以下定義: τ ( t ) 是碰撞時(shí)間。我們注意到這個(gè)大小不能從運(yùn)動(dòng)學(xué)數(shù)據(jù)中確定。相反,它必須是先驗(yàn)的,然后才能確定我們正在建模的戰(zhàn)爭沖突的結(jié)果。根據(jù)等式 5 并考慮到等式 6,可得出:

該方程可以逐個(gè)分量地寫出(根據(jù)坐標(biāo)軸 x、y、z),得到一階微分方程組:

其中,連同初始條件

它唯一地確定了解決方案,從而確定了攻擊者的軌跡。我們稱 (11) 跟蹤方程或追蹤方程。為了在Mathematica計(jì)算環(huán)境中執(zhí)行模擬, 最好在二維中工作,抑制系統(tǒng) (11) 的第三個(gè)方程(我們將立即得出的結(jié)論推廣到通常的三維)。所以讓我們重寫:

(13) 型微分方程的特點(diǎn)在于解具有初始瞬態(tài) ,然后讓位于穩(wěn)態(tài)解。換言之,在初始階段之后,追蹤軌跡經(jīng)歷了穩(wěn)定。例如,在圖 3 中,顯示了一些跟蹤幀,但沒有實(shí)現(xiàn),因?yàn)槲覀兪褂?τ ( t ) = τ 0 》 0。由于初始條件的特定選擇,在這種情況下,沒有初始瞬態(tài),并且跟蹤軌跡本身就是一個(gè)圓。我們觀察到存在追逐,因?yàn)楣粽叩乃俣仁噶浚ㄋ{(lán)點(diǎn))朝向目標(biāo)的瞬時(shí)位置(紅點(diǎn))。
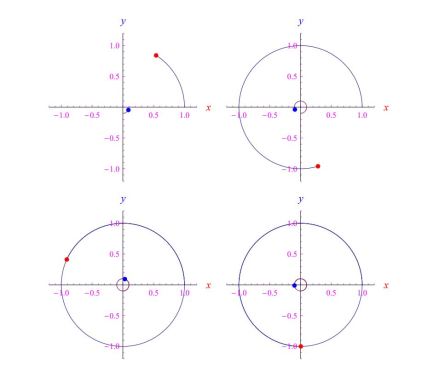
圖 3:紅點(diǎn)穿過指定的圓周,而藍(lán)點(diǎn)跟隨紅點(diǎn),因?yàn)樗俣仁噶恐赶蚣t點(diǎn)的瞬時(shí)位置。很明顯,藍(lán)色永遠(yuǎn)不會(huì)變成紅色,因?yàn)槲覀冊(cè)O(shè)置了 τ (t) = τ0 》 0。
在圖 4 中,我們報(bào)告了一些帶有初始瞬態(tài)的追逐幀。如您所見,軌跡非常具有啟發(fā)性。我們可以假設(shè)以下類型的線性定律,而不是考慮函數(shù) τ ( t ) 相同地恒定(并且為正):

其成就時(shí)刻為 t * = β / α。 α = 10 , β = 0的前一種情況(循環(huán) 跟蹤)。2,整合跟蹤方程,我們得到圖5的幀。在更現(xiàn)實(shí)的場(chǎng)景中,目標(biāo)以隨機(jī)模式執(zhí)行規(guī)避機(jī)動(dòng)或執(zhí)行隨機(jī)游走。眾所周知,后者是維納過程。2Mathematica 計(jì)算環(huán)境允許快速實(shí)施此過程。準(zhǔn)確地說,通過一個(gè)數(shù)組的插值,它的元素是白噪聲假定的值,我們得到一個(gè)在數(shù)學(xué)分析意義上實(shí)際上是時(shí)間函數(shù)的量。換句話說,進(jìn)入跟蹤方程 (13) 的目標(biāo)坐標(biāo)被視為通常的函數(shù),因此可以通過 Mathematica 執(zhí)行 它們的積分,從而知道跟蹤的軌跡。在圖 6 中,我們報(bào)告了隨機(jī)游走中目標(biāo)的一些追蹤/實(shí)現(xiàn)幀,而在圖 7 中,繪制了兩架飛機(jī)的速度。目標(biāo)是清晰的白噪聲。
結(jié)論
追蹤方程(11)作用于攻擊者速度矢量的方向和方向。另一方面, 函數(shù)τ ( t ) 作用于該向量的模,即,作用于標(biāo)量函數(shù)v ( t )。
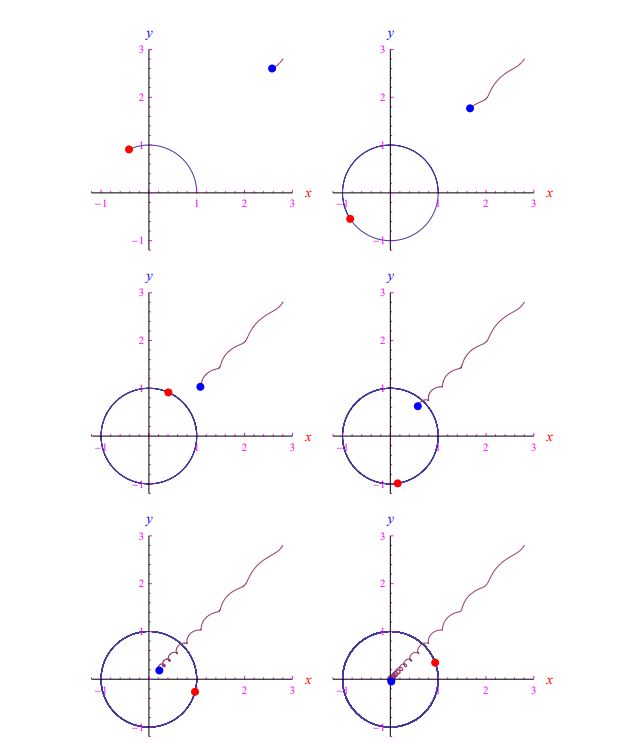
圖 4:術(shù)語“瞬態(tài)”描述了一條曲線,直到它停留在半徑 1/√401 的圓周上。
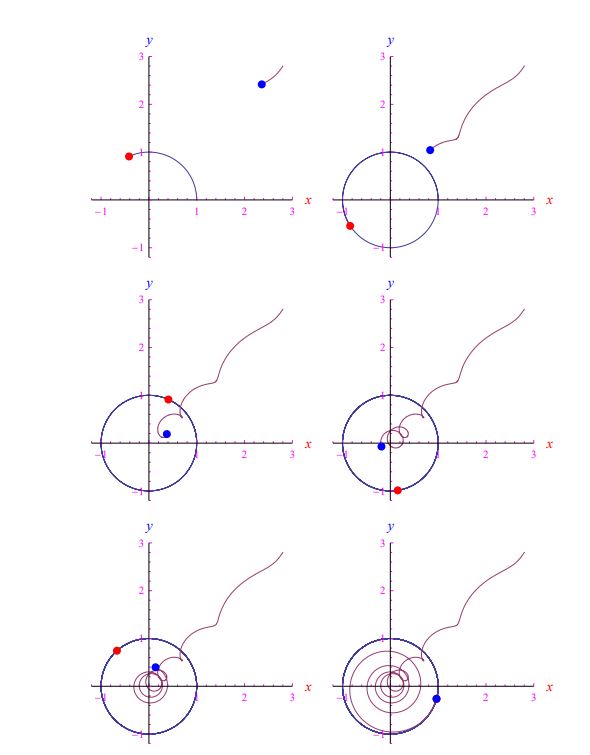
圖 5:攻擊者在時(shí)間t * = 50(無量綱單位)后到達(dá)目標(biāo)。
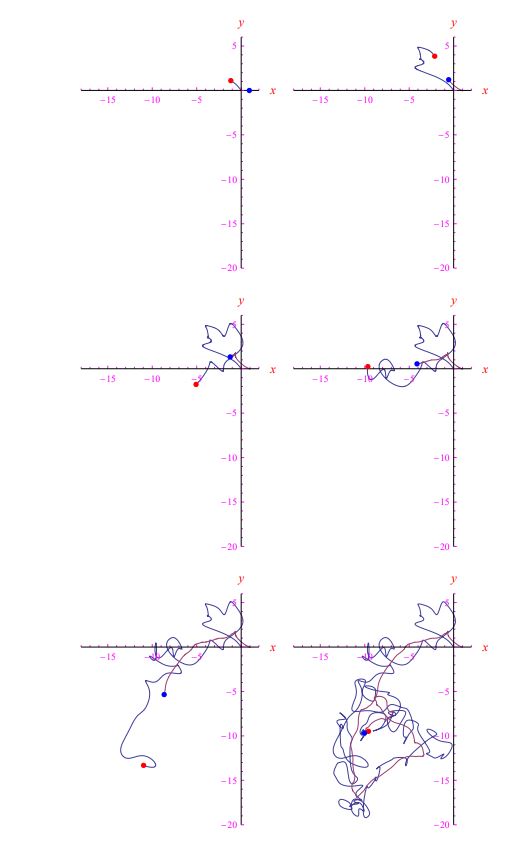
圖 6:攻擊者在時(shí)間t * = 200(無量綱單位)后到達(dá)目標(biāo)。
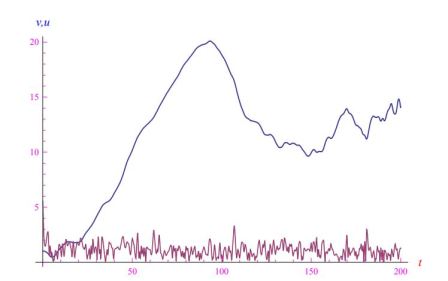
圖 7:速度與時(shí)間(無量綱單位)
由此可見,追擊是由攻擊者通過 ξ (t) 決定的,而碰撞是由 τ (t) 決定的。我們的算法是一個(gè)有趣的計(jì)算實(shí)驗(yàn),可以更好地理解 IRST 運(yùn)動(dòng)學(xué)。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2548文章
50740瀏覽量
752148 -
濾波器
+關(guān)注
關(guān)注
160文章
7749瀏覽量
177737
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
長虹等離子50638X50738X模組紅點(diǎn)問題解決方案相關(guān)資料分享
步進(jìn)電機(jī)基礎(chǔ)(8.2)-步進(jìn)電機(jī)的問題解決方案-降低振動(dòng)噪音的解決方法 相關(guān)資料分享
IPTV系統(tǒng)中的FPGA供電問題解決方案
altium_designer_Summer09出現(xiàn)的問題解決方案
手機(jī)快充的噪聲問題解決方案資料下載

N76E003的EEPROM問題解決方案:使用Data Flash模擬EEPROM
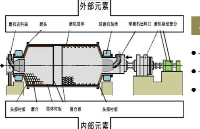
水泥設(shè)備自主維修之:球磨機(jī)問題解決方案圖文案例匯總,這種修復(fù)技術(shù)值得推薦
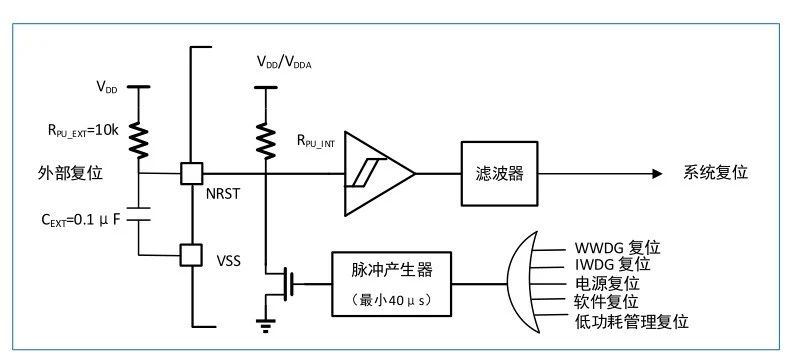
芯片不斷的復(fù)位問題解決方案-HK32F030M應(yīng)用筆記(二十五)
C2000 F28004x系列MCU PLL鎖相失敗問題解決方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論