") 工業(yè)應(yīng)用太陽能跟蹤器設(shè)計(jì)方案
工業(yè)應(yīng)用太陽能跟蹤器設(shè)計(jì)方案
太陽能跟蹤器是一種自動化設(shè)備,用于定向?qū)ο?例如太陽能電池板),有利地關(guān)注太陽光線,從而有利于增加能源設(shè)備的有效產(chǎn)量。一種類型的太陽能跟蹤器是定日鏡。該原型希望通過市場上容易獲得的組件提供創(chuàng)建簡單太陽能跟蹤器的專業(yè)知識,并成為未來發(fā)展的指南。使用的電子元件的尺寸適合處理小型電機(jī)。為了支持大型物體,還需要實(shí)現(xiàn)電源電路。
目標(biāo)!
該電路旨在為相關(guān)對象提供盡可能朝向太陽的位置。由于地球自轉(zhuǎn)的影響,太陽的相對位置會發(fā)生變化,因此需要運(yùn)動控制系統(tǒng)將物體自動定位在太陽前方。該電路由一些光敏電阻和一個伺服電機(jī)組成。ATmega328 管理系統(tǒng)邏輯。MCU 測量六個光傳感器的電壓(通過六個模擬輸入端口)并將電機(jī)移動到正確的位置。
光檢測器
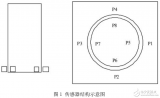
由于 ATmega328 MCU 有六個 ADC 輸入,因此該電路包含六個光傳感器。它們以光敏電阻為代表,連接到六個固定電阻,作為電壓的除數(shù)。光敏電阻的值必須相同。根據(jù)太陽的角度,它們必須以 180 度的總角距離定位和定向,從東到西。一個傳感器與下一個傳感器之間的角距離必須為 36 度,如圖 1所示。傳感器的“高度”取決于電路在地球上的位置(緯度)。
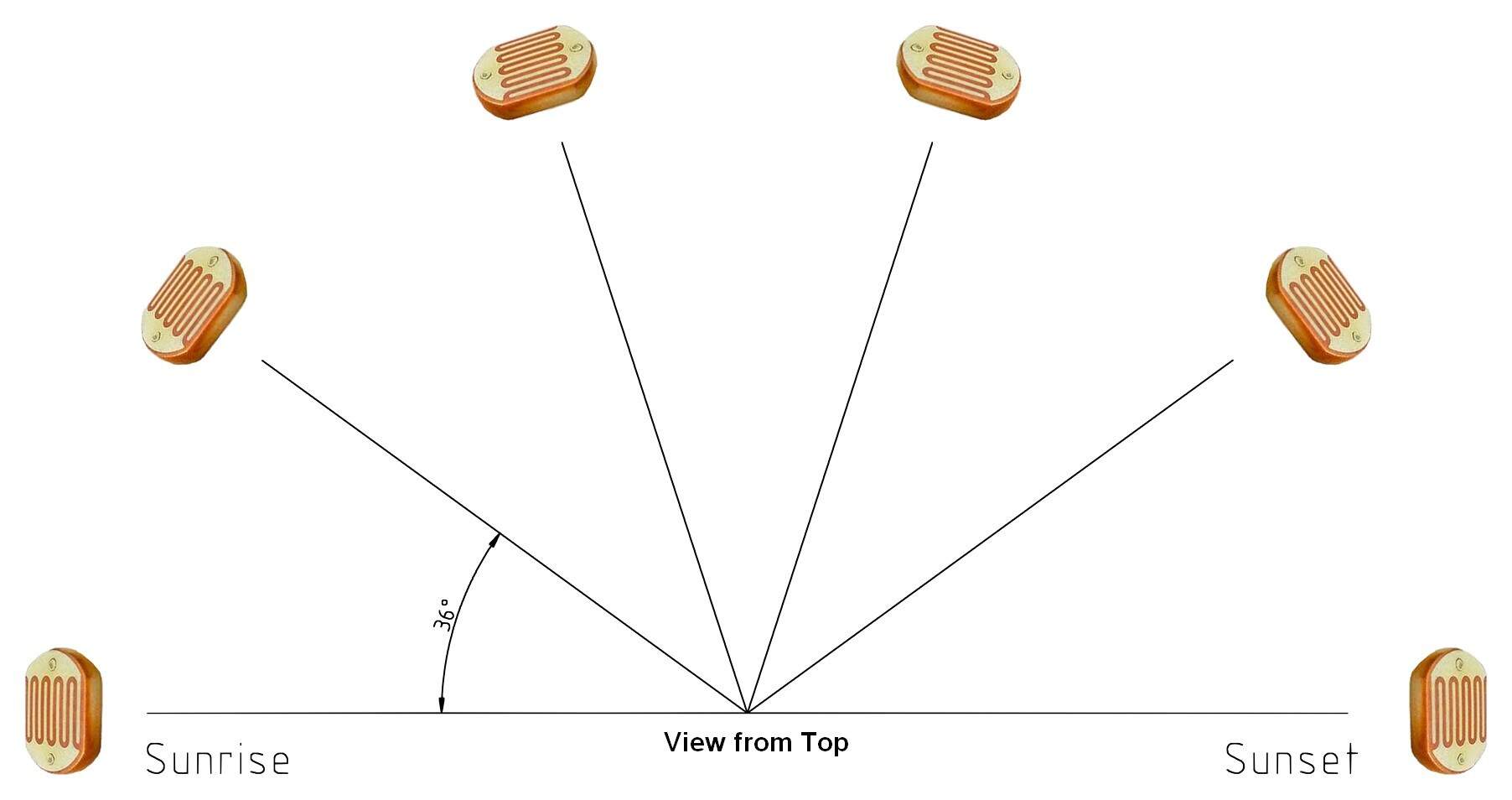
圖1:六個光傳感器的位置
光敏電阻的值可以是任意的,重要的是除數(shù)的固定電阻的值也相同。光敏電阻的值必須用太陽光來測量。如圖2所示,光敏電阻在除數(shù)的熱端;固定電阻接地。信號(輸出)在中心節(jié)點(diǎn)上。讓我們看一下圖 2。在此示例中,太陽主要指向第四個光傳感器。如果所有傳感器具有相同的特性并且所有電阻具有相同的值,則第四除數(shù)將最高電壓提供給微控制器。根據(jù)這個事實(shí),它將決定舵機(jī)的位置。這里使用的光敏電阻具有以下值:
? 在黑暗中:7MΩ
? 環(huán)境光下:15kΩ
? 被太陽照亮:400 Ω
顯然,您可以使用任何光敏電阻。
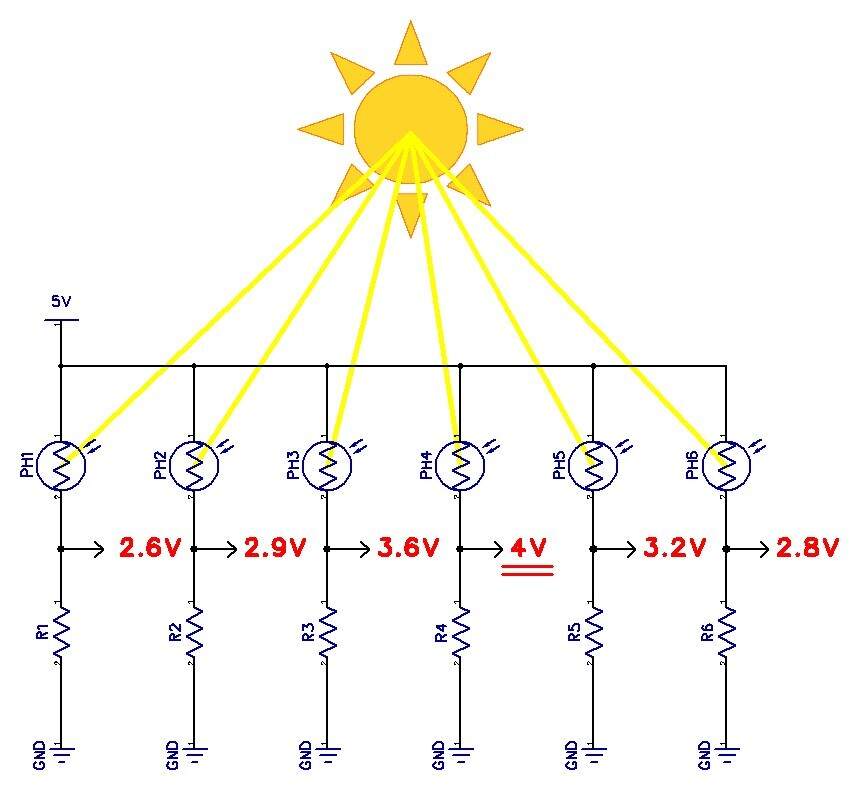
圖 2:分壓器
伺服
伺服系統(tǒng)用于自動化系統(tǒng),并允許通過與 MCU 邏輯端口的單個連接來實(shí)現(xiàn)精確的角運(yùn)動。該組件非常適合需要受控旋轉(zhuǎn)的項(xiàng)目。幾乎可以在任何可以找到 5V 電源的地方添加它們。脈沖信號控制伺服。它可以在大約180°的角度工作。它以 1.5ms 脈沖移動至 0°,以 2ms 脈沖移動至 90°,以 1ms 脈沖移動至 -90°(如圖 3所示)。高脈沖的寬度決定了伺服電機(jī)的角度。By appropriately choosing different values, between a minimum and a maximum, it is possible to orient the servo to any allowed direction. 伺服可以移動一個小太陽能電池板或一個小花盆。為此,您必須構(gòu)建一個能夠包含這些對象的結(jié)構(gòu)。
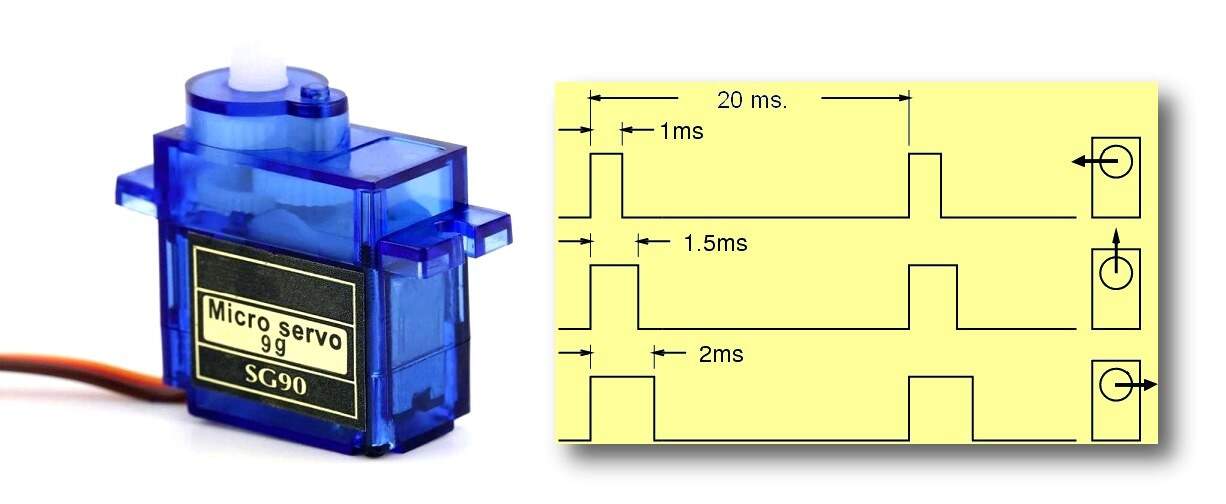
圖3:本項(xiàng)目中使用的Servo
電氣原理圖
電氣原理圖(見圖 4)非常簡單。它由 ATMega328P MCU 及其外部振蕩器組成。六個光敏電阻和相對固定的電阻實(shí)現(xiàn)電壓除數(shù)。電阻器的值必須與被太陽照射的光敏電阻器的值大致相同。最開明的除數(shù)將提供最高電壓,并且固件將知道跟隨太陽將伺服旋轉(zhuǎn)到指定角度。
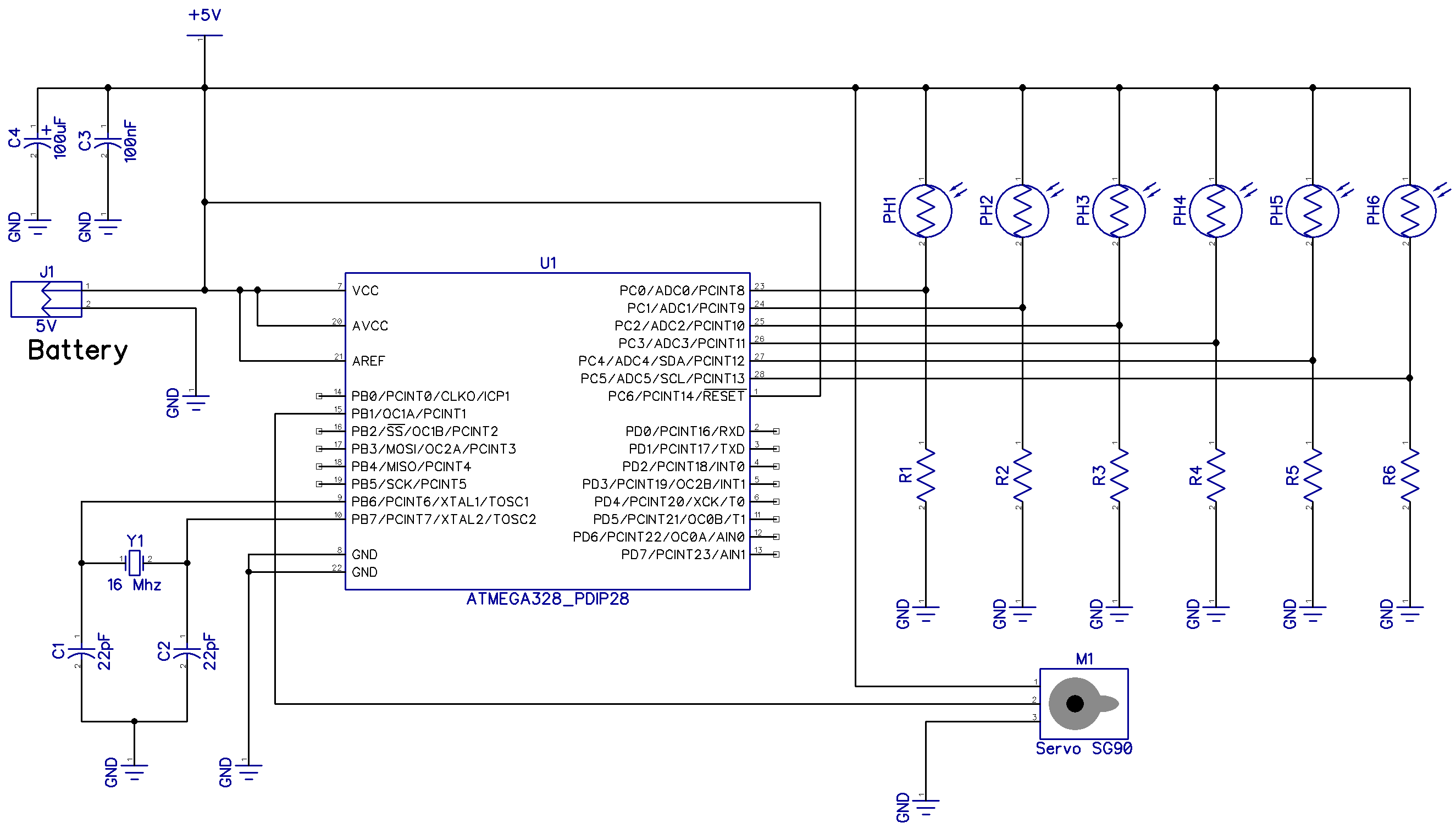
圖 4:電氣原理圖
印刷電路板
PCB的創(chuàng)建不會出現(xiàn)問題。其尺寸為 115 mm x 65 mm(圖 5)。它的實(shí)現(xiàn)非常容易。雖然存在許多連接,但它是單層 PCB。走線的厚度足以滿足電路的低電流。它可以通過轉(zhuǎn)移鉛筆、光刻或壓剝板生產(chǎn)。
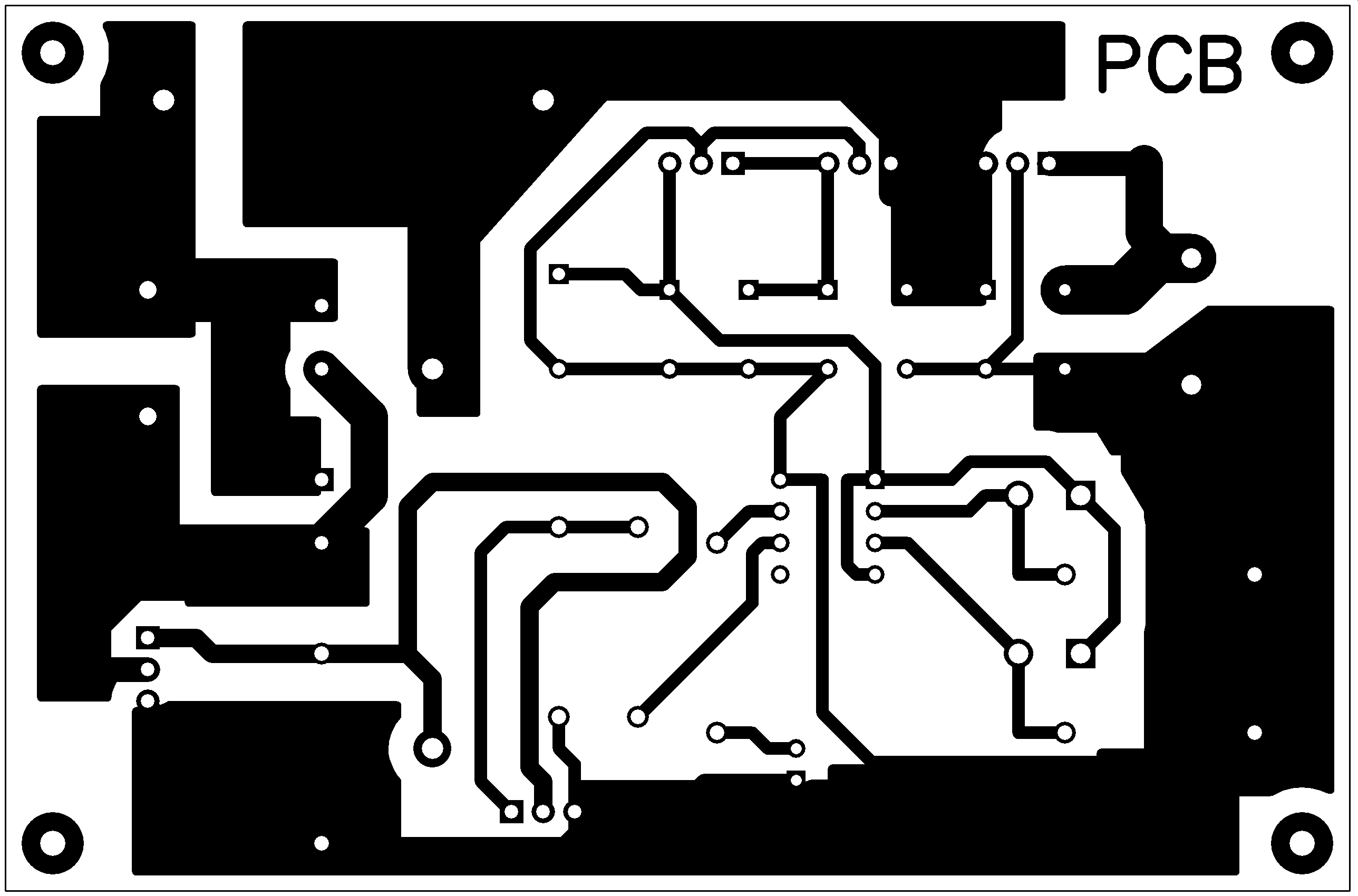
圖 5:PCB
安裝組件
對于電路的組裝(請看圖 6),您必須以低剖面安裝組件,如電阻器和陶瓷電容器。然后你可以放置最大的組件。如您所見,光敏電阻的角度不一樣。它們旋轉(zhuǎn)了 36°,因?yàn)橐粋€傳感器與下一個傳感器之間的角距離必須為 36 度(0°、36°、72°、108°、144°、180°)才能完美地跟隨太陽。
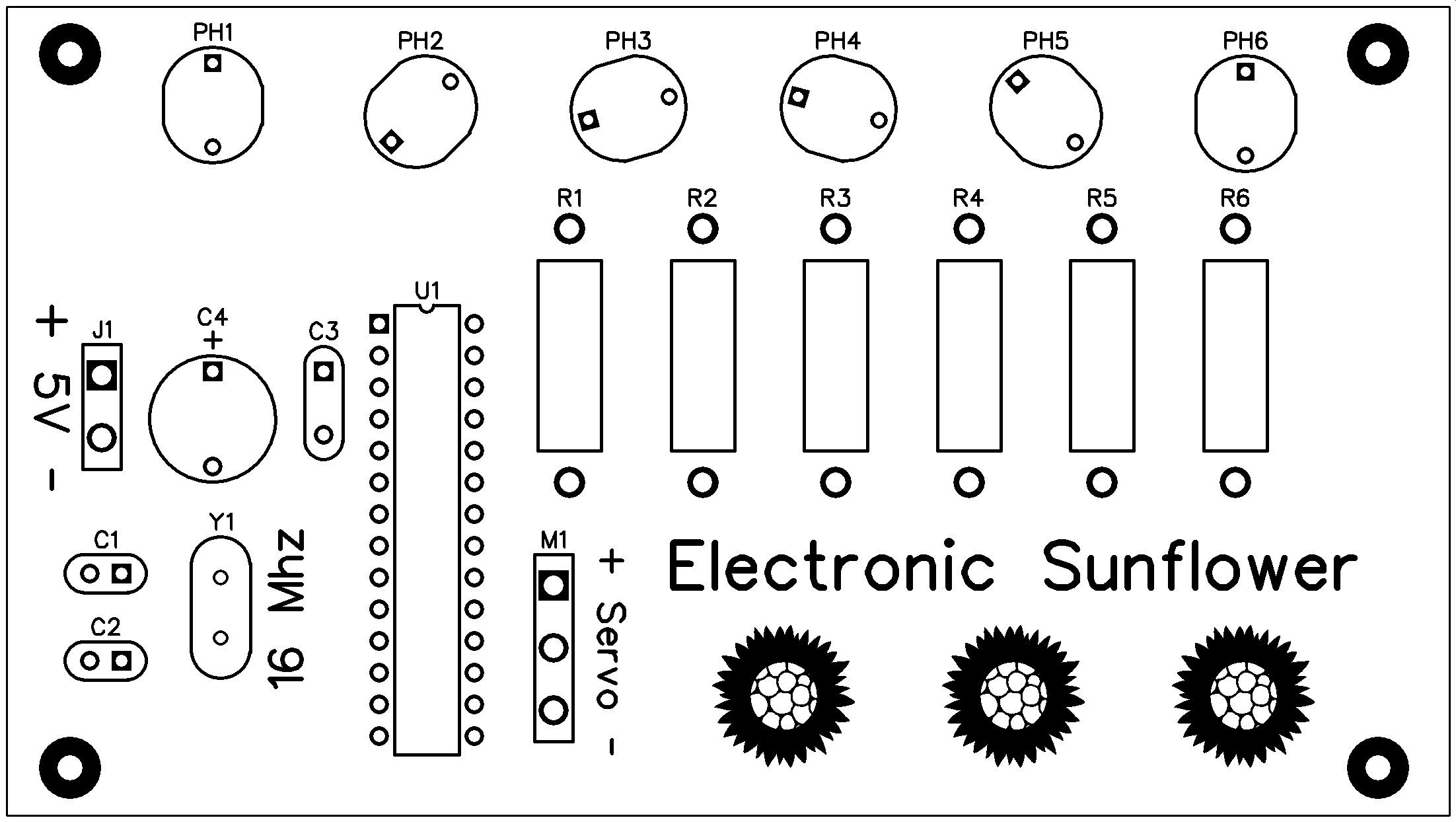
圖 6:PCB 上組件的 2D 布局
圖 7顯示了組件和 PCB 的 3D 視圖。
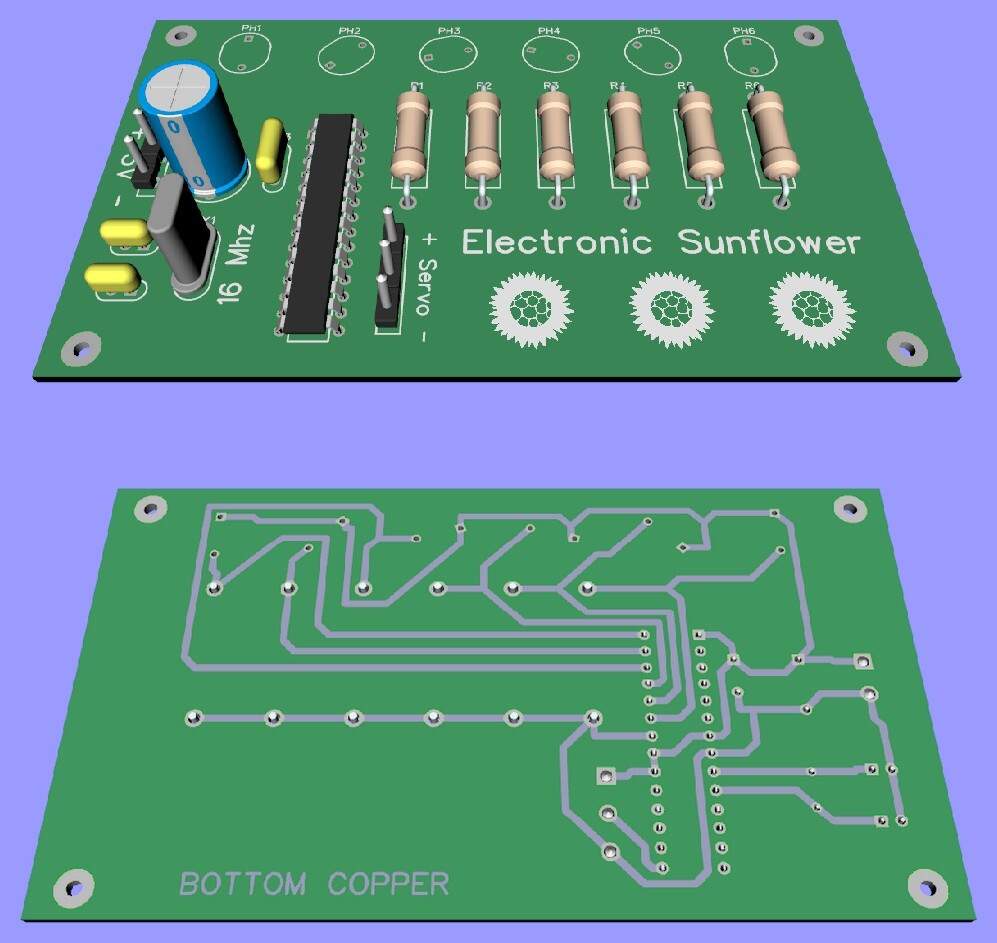
圖 7:3D 預(yù)覽
組件列表
C1 = 陶瓷電容 22pF
C2 = 陶瓷電容 22pF
C3 = 聚酯電容 100nF
C4 = 電解電容 100uF
J1 = PCB 2 針頭,5mm
M1 =伺服SG90
PH1 = 光敏電阻 15kΩ
PH2 = 光敏電阻 15kΩ
PH3 = 光敏電阻 15kΩ
PH4 = 光敏電阻 15kΩ
PH5 = 光敏電阻 15kΩ
PH6 = 光敏電阻 15kΩ
R1 = 電阻 390 Ω
R2 = 電阻 390 Ω
R3 = 電阻 390 Ω
R4 = 電阻 390 Ω
R5 = 電阻 390 Ω
R6 = 電阻 390 Ω
U1 = ATMEGA328_PDIP28 MCU
Y1 = 16 MHz 晶振
固件
固件不是關(guān)鍵的,不使用任何庫進(jìn)行伺服管理。脈沖由 MCU 數(shù)字端口的快速換向產(chǎn)生。這種換向由 UDF“servo()”執(zhí)行,它接受脈沖的長度(以微秒為單位)作為參數(shù)。函數(shù)“setup()”將端口 9 配置為數(shù)字輸出,用戶可以更改它。函數(shù)“l(fā)oop()”每秒執(zhí)行一次,程序讀取六個模擬輸入并將結(jié)果存儲在六個整數(shù)變量(S0、S1、S2、S3、S4 和 S5)中。然后,六個“if”條件檢查提供更多電壓的傳感器。它是來自太陽的最高光的光敏電阻。這些條件根據(jù)太陽的位置旋轉(zhuǎn)伺服電機(jī)。MCU 的編程非常簡單。您必須在 Arduino IDE 中鍵入草圖,如圖所示圖 8。6個角度(0°、36°、72°、108°、144°、180°)的參數(shù)通過線性曲線計(jì)算,如圖9所示,公式如下:
y(x) = 9.444444*x + 800
使用此公式,您可以在微秒內(nèi)找到任何長度的脈沖,從而獲得所需的角度。
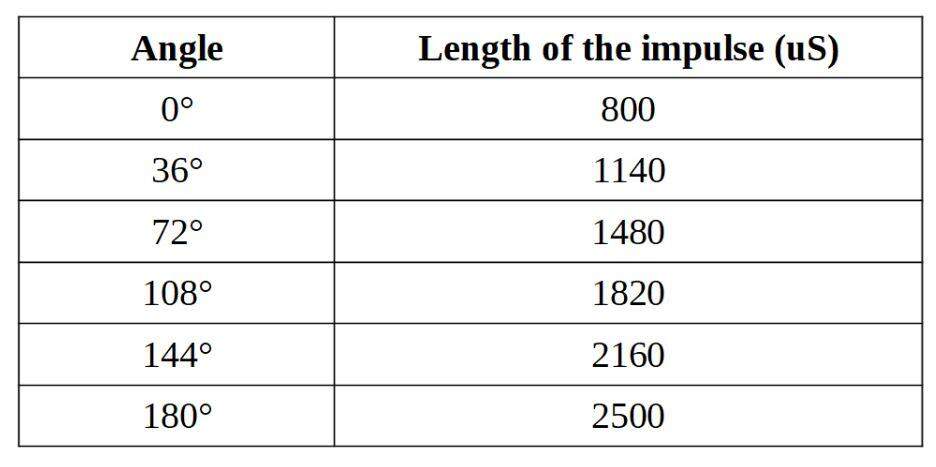
表 1:脈沖的角度和相對持續(xù)時間
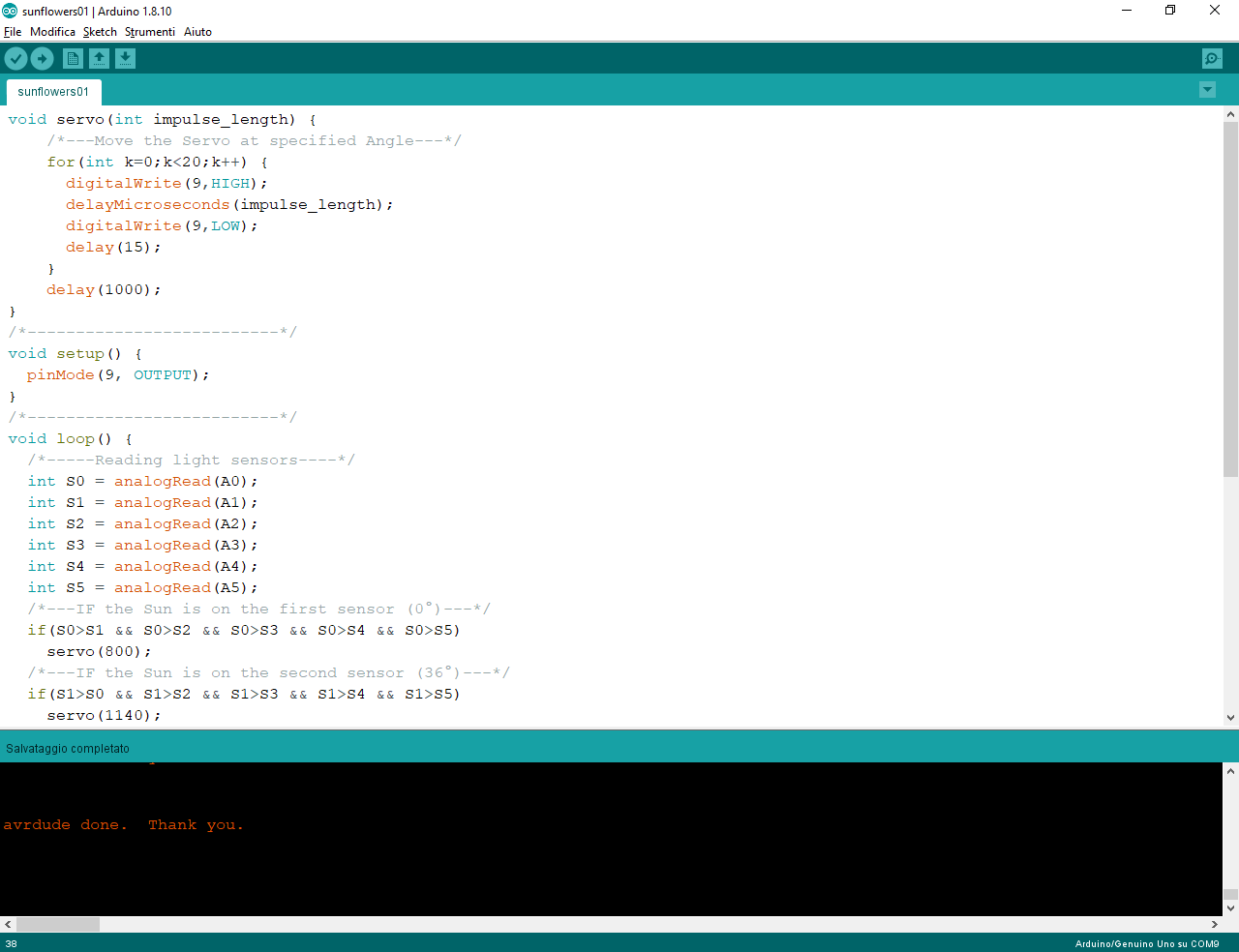
圖 8:Arduino IDE
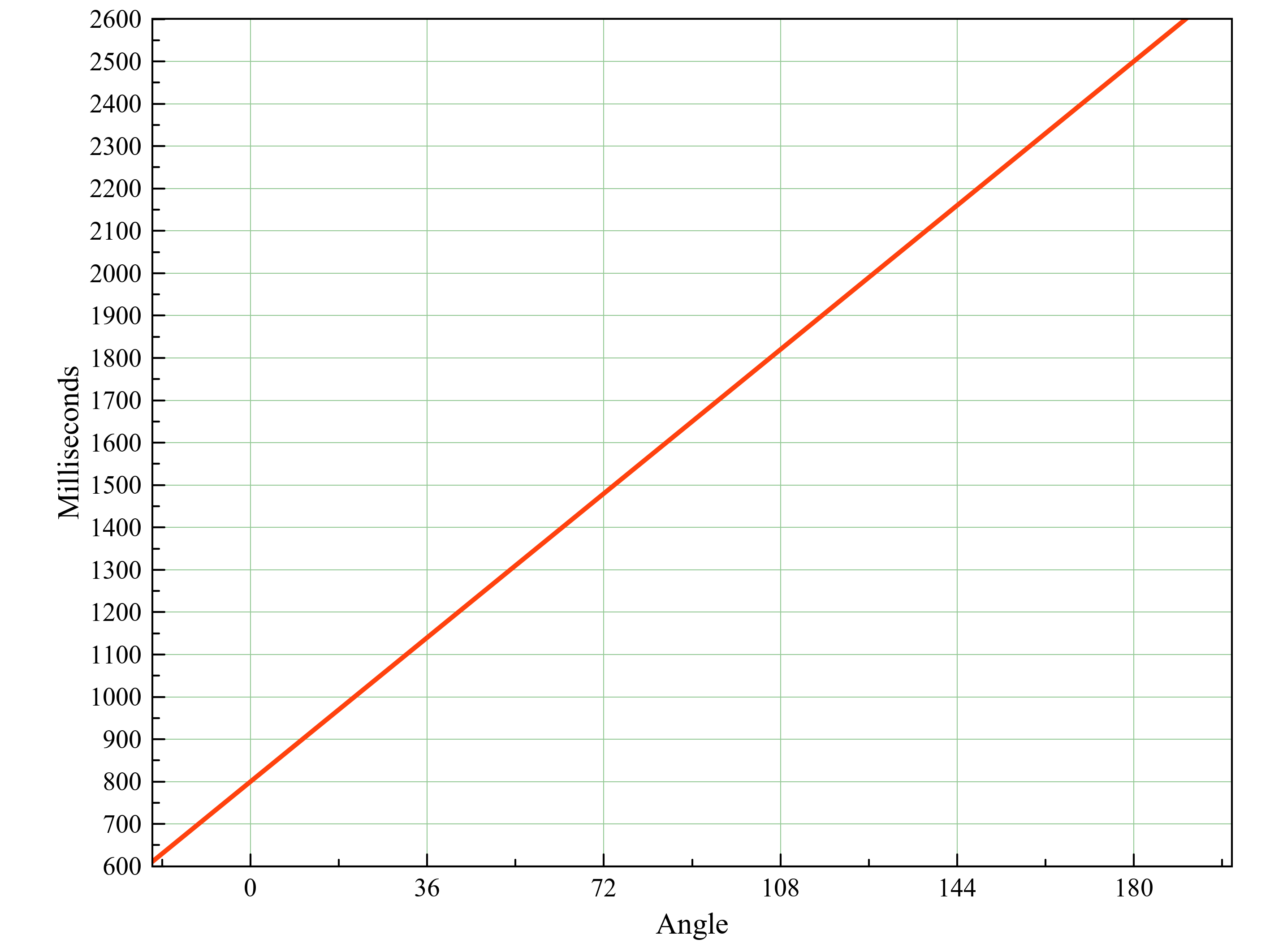
圖 9:伺服角度的曲線擬合
應(yīng)用
一些實(shí)際和有用的應(yīng)用程序如下:
? 將太陽能電池板朝向太陽,以獲得最大能量;
? 將植物或花朵朝向太陽,以捕捉最多的光線。
對于大型物體,可以使用帶有電源電路的強(qiáng)大伺服。草圖可以根據(jù)自己的需要進(jìn)行修改和更改。如果您不想構(gòu)建 PCB,您可以使用帶有面包板的 Arduino Uno,您可以在其上安裝光敏電阻器和電阻器(參見圖 10)。ATmega328P 的工作溫度在-55°C 到+125°C 之間。雖然這個范圍很寬,但是將MCU 置于陰影處是一個不錯的選擇,尤其是在非常溫暖的國家。
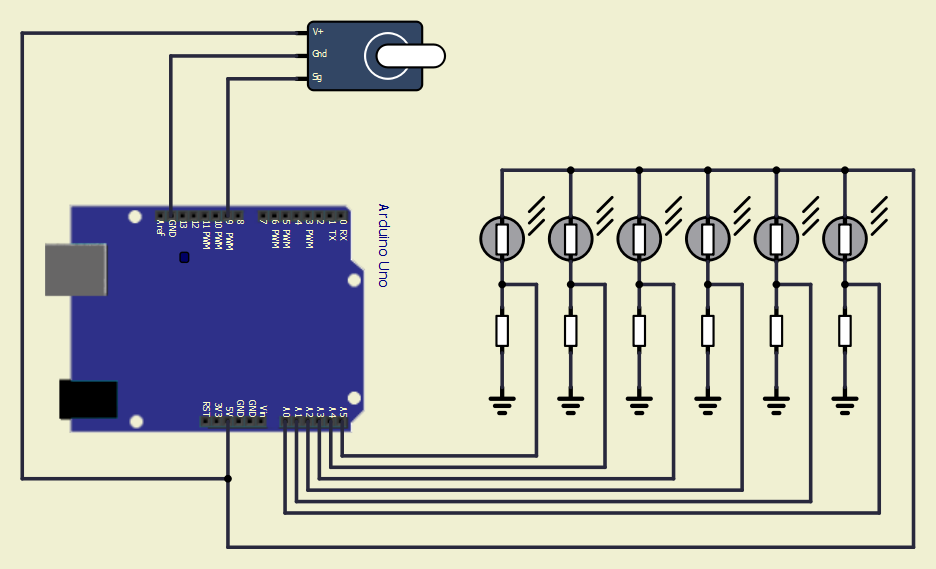
圖 10:太陽能軌道的 Arduino 實(shí)現(xiàn)
結(jié)論
這個項(xiàng)目非常通用。用戶可以根據(jù)自己的需要進(jìn)行更改。人們應(yīng)該始終使用太陽能,因?yàn)樗鍧崱⒚赓M(fèi)和豐富。此外,為電路供電的能量應(yīng)從太陽能電池板充電的電池中獲取,以避免電費(fèi)開支。
審核編輯:湯梓紅
-
太陽能
+關(guān)注
關(guān)注
37文章
3382瀏覽量
114078 -
跟蹤器
+關(guān)注
關(guān)注
0文章
131瀏覽量
20013
發(fā)布評論請先 登錄
相關(guān)推薦
怎樣去設(shè)計(jì)一種太陽能的太陽跟蹤器
基于ATmega8的雙軸太陽跟蹤器設(shè)計(jì)
太陽能自動跟蹤器的組成及基于ARM的太陽能發(fā)電控制系統(tǒng)的設(shè)計(jì)
基于Arduino的太陽能跟蹤器的制作教程
簡易太陽能跟蹤器制作教程
便攜式太陽能跟蹤器的制作

DIY太陽能跟蹤器Arduino項(xiàng)目ITA

使用Arduino Uno和伺服電機(jī)的太陽能陽光跟蹤器

Wi-SUN 可最大限度地提高太陽能跟蹤器的性能






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論