") 用于距離測(cè)量和目標(biāo)檢測(cè)的飛行時(shí)間系統(tǒng)
用于距離測(cè)量和目標(biāo)檢測(cè)的飛行時(shí)間系統(tǒng)
作者:ADI公司 Thomas Brand,高級(jí)現(xiàn)場(chǎng)應(yīng)用工程師
距離測(cè)量和目標(biāo)檢測(cè)在許多領(lǐng)域發(fā)揮著重要作用,包括工廠自動(dòng)化、機(jī)器人應(yīng)用和物流。特別是在安全應(yīng)用領(lǐng)域,需要對(duì)特定距離的物體或人員進(jìn)行檢測(cè)和響應(yīng)。例如,一旦工人進(jìn)入危險(xiǎn)區(qū)域,機(jī)械臂就可能需要立即停止操作。
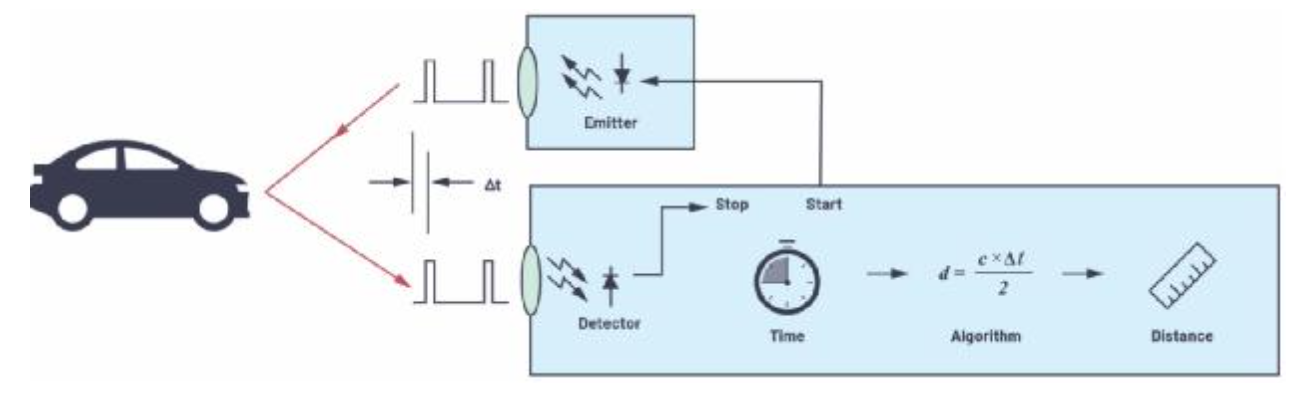
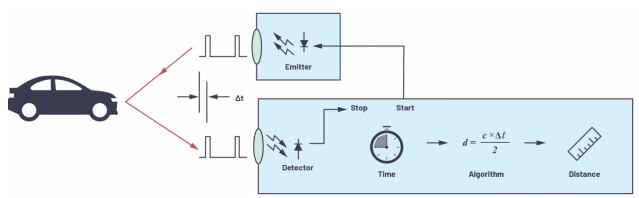
因此,飛行時(shí)間(ToF)變得越來(lái)越重要。使用ToF技術(shù),光從調(diào)制光源(如激光)發(fā)射,光束經(jīng)過(guò)一個(gè)或多個(gè)物體反射后由傳感器或攝像機(jī)捕獲。因此,可以通過(guò)發(fā)射光與接收發(fā)射光之間的時(shí)間延遲?T來(lái)確定距離。時(shí)間延遲與攝像機(jī)和物體之間的兩倍距離(往返)成正比。所以,距離可估算為深度d = (c × Δt)/2,其中c表示光速。ToF攝像機(jī)輸出2D數(shù)據(jù)以及所需的深度信息。
ToF允許一次記錄整個(gè)圖像。不需要逐行掃描,也不需要傳感器和被觀察物體之間的相對(duì)運(yùn)動(dòng)。ToF通常劃歸為L(zhǎng)IDAR(光探測(cè)和測(cè)距),但它實(shí)際上是基于flash LIDAR的方法,而不是掃描LIDAR。
利用ToF測(cè)量光脈沖的飛行時(shí)間基本上有兩種不同的方法:基于電荷耦合器件(CCD)技術(shù)的脈沖操作模式和連續(xù)波(CW)操作模式。
在脈沖模式下測(cè)量光脈沖發(fā)射和接收之間經(jīng)過(guò)的時(shí)間,在CW模式下測(cè)定發(fā)射和接收調(diào)制光脈沖之間的相移。這兩種操作模式都各有優(yōu)缺點(diǎn)。脈沖模式更耐環(huán)境光,因此更有利于戶外應(yīng)用,因?yàn)樵摷夹g(shù)通常依賴短集成窗口在很短的時(shí)間內(nèi)發(fā)出的高能光脈沖。而CW模式可能更容易實(shí)現(xiàn),因?yàn)楣庠床槐睾芏蹋揖哂猩仙?下降沿。但是,如果精度要求變得更嚴(yán)格,那么將需要更高頻率的調(diào)制信號(hào),這可能很難實(shí)現(xiàn)。
現(xiàn)有的像素大小使得芯片分辨率很高,不僅支持距離測(cè)量,也支持物體和手勢(shì)識(shí)別。測(cè)量距離從幾厘米(<10厘米)到幾米(<15米)不等。
遺憾的是,并非所有物體都能同樣探測(cè)到。物體的狀況、反射率和速度都會(huì)影響測(cè)量結(jié)果。
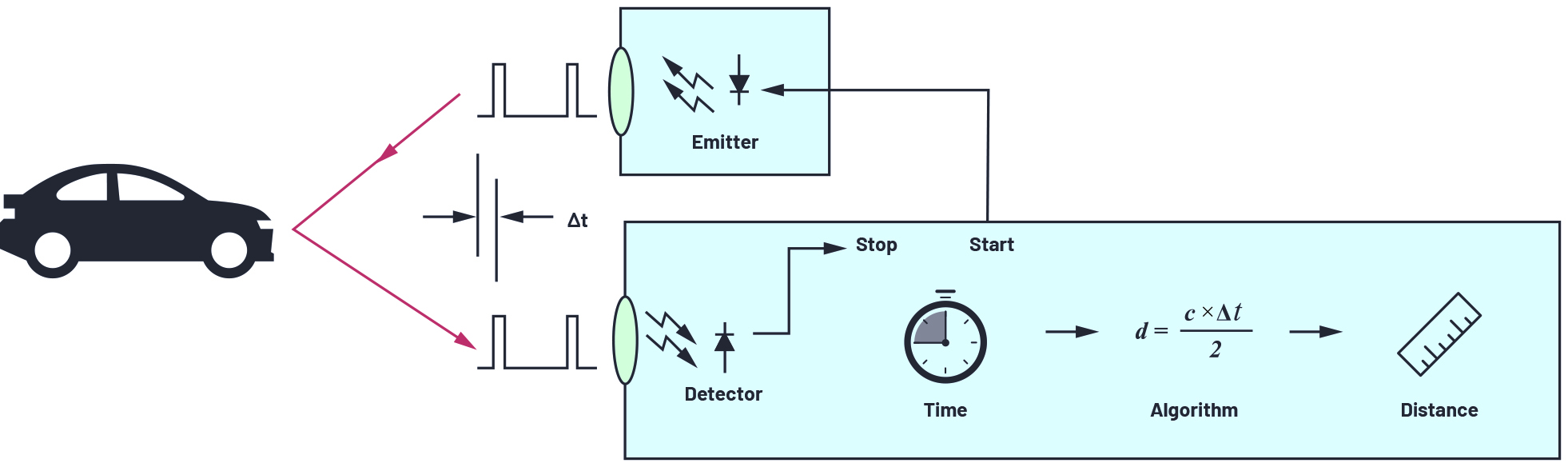
圖1.飛行時(shí)間測(cè)量原理
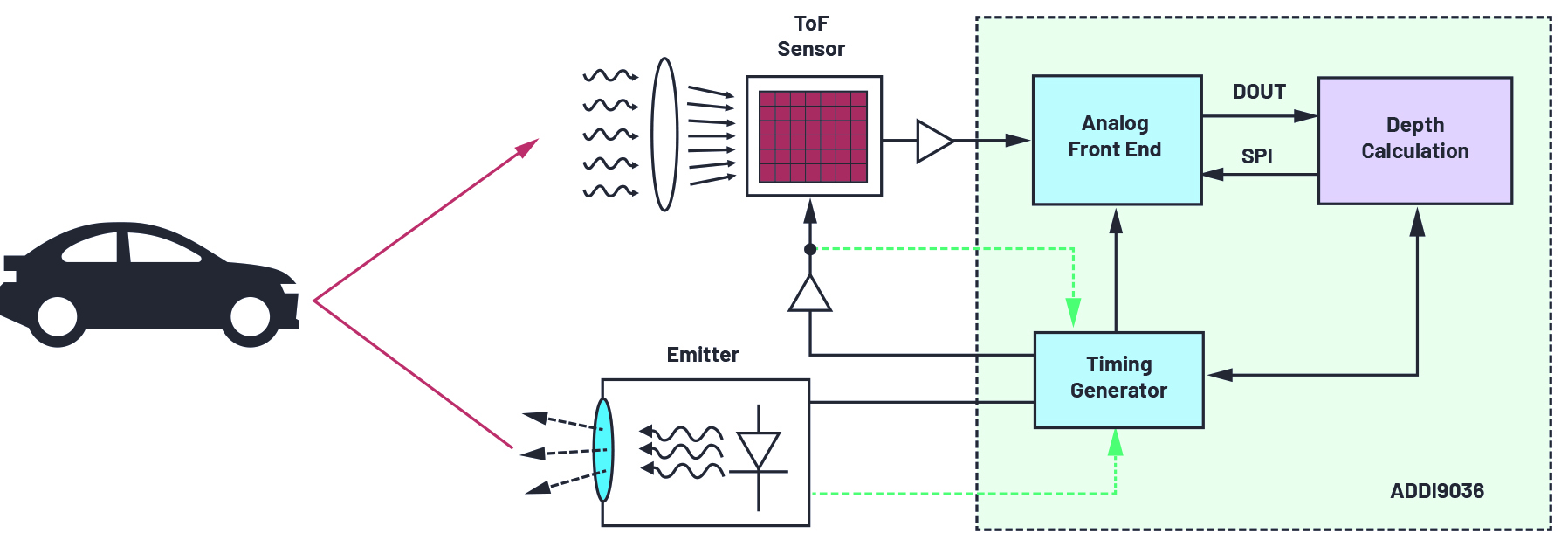
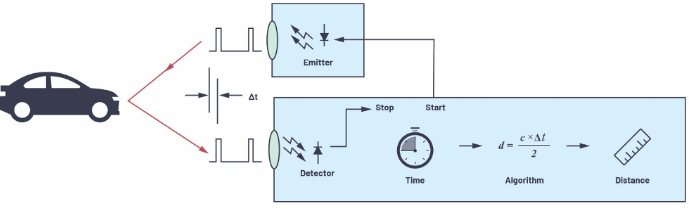
圖2.ToF系統(tǒng)功能框圖
測(cè)量結(jié)果也可能因霧或強(qiáng)烈的陽(yáng)光等環(huán)境因素而失真。環(huán)境光抑制有助于解決強(qiáng)烈的陽(yáng)光導(dǎo)致的失真問(wèn)題。
ADI等半導(dǎo)體制造商提供完整的3D ToF系統(tǒng),以支持快速實(shí)現(xiàn)3D ToF解決方案。他們將數(shù)據(jù)處理、激光驅(qū)動(dòng)、電源管理和軟件/固件集成到一個(gè)電子控制單元中。其他組件包括發(fā)射調(diào)頻光信號(hào)的發(fā)射器和記錄反射信號(hào)的檢波器。框圖如圖2所示。
具有集成深度計(jì)算功能的模擬前端(AFE)等組件對(duì)于構(gòu)建此類系統(tǒng)將會(huì)大有幫助。而ADDI9036就提供這一功能。它是一個(gè)完整的CCD ToF信號(hào)處理器,具有集成激光二極管驅(qū)動(dòng)器、12位ADC,以及為CCD和激光器生成時(shí)序的高精度時(shí)鐘發(fā)生器。ADDI9036負(fù)責(zé)處理來(lái)自VGA CCD傳感器的原始圖像數(shù)據(jù)以生成深度/像素?cái)?shù)據(jù)。
ADI還與設(shè)計(jì)合作伙伴合作,可以共同提供成品模塊和開(kāi)發(fā)平臺(tái)。這些評(píng)估系統(tǒng)可用于開(kāi)發(fā)特定的客戶算法。成品模塊和平臺(tái)有助于加速開(kāi)發(fā),這在工業(yè)和汽車工程等時(shí)間緊迫的業(yè)務(wù)領(lǐng)域尤為重要。
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2548文章
50668瀏覽量
751950 -
ADI
+關(guān)注
關(guān)注
144文章
45812瀏覽量
248704 -
TOF
+關(guān)注
關(guān)注
9文章
476瀏覽量
36270
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
用于距離測(cè)量和目標(biāo)檢測(cè)的飛行時(shí)間系統(tǒng)
使用高速數(shù)據(jù)轉(zhuǎn)換器的LIDAR脈沖飛行時(shí)間測(cè)量方法
哪個(gè)模塊最適合從距離傳感器模塊飛行時(shí)間 (ToF) 測(cè)距傳感器測(cè)量準(zhǔn)確距離?
開(kāi)源硬件-TIDA-00663-雷達(dá)脈沖飛行時(shí)間 PCB layout 設(shè)計(jì)

Adafruit VL53L0X飛行時(shí)間距離傳感器的使用
飛行時(shí)間傳感器的距離確定方法
飛行時(shí)間傳感器如何工作,使用飛行時(shí)間傳感器的好處
3D飛行時(shí)間技術(shù)在深度測(cè)量和物體檢測(cè)領(lǐng)域中發(fā)揮著重要作用
用于距離測(cè)量和目標(biāo)檢測(cè)的飛行時(shí)間系統(tǒng)
用于距離測(cè)量和物體檢測(cè)的飛行時(shí)間系統(tǒng)
用于距離測(cè)量和物體檢測(cè)的飛行時(shí)間系統(tǒng)
什么飛行時(shí)間測(cè)量法?

貿(mào)澤開(kāi)售TDK InvenSense ICU-20201飛行時(shí)間距離傳感器
硅光電倍增管用于直接飛行時(shí)間測(cè)距應(yīng)用(一):直接ToF測(cè)距系統(tǒng)的設(shè)計(jì)

飛行時(shí)間傳感器:技術(shù)原理與多元應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論