 如何在Vitis加速設計中為Kernel創建面積約束
如何在Vitis加速設計中為Kernel創建面積約束
Alveo系列開發板上的平臺其實是一個DFX設計的靜態部分,在Vitis 統一軟件平臺中使用Alveo系列開發板設計加速Kernel, 最終這些Kernel的邏輯會在分布在DFX設計的動態區域。
本篇將介紹如何為Kernel的邏輯做floorplan(畫Pblock),人為控制Kernel邏輯的布局。
我們以經典Example design“Vector Addition” 為例:
1. 打開Vitis 2020.2,創建新的 Application Project
File -> New -> Application project
2. 選擇xilinx_u200_qdma_201910_1平臺 (本篇討論的方法不局限于某個具體平臺)
3. 選擇打開Example Design "Vector Addition"
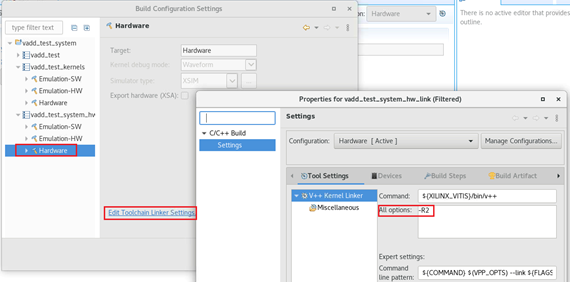
4. 對Hardware Flow 在Link階段設置 "-R2",然后Build
此處report level 選擇-R2:VPL(Vitis Platform link) 過程輸出更多中間文件, 后續我們會用到畫Kernel Pblock所需要的opt.dcp
5. 不用等到生成xclbin文件,VPL完成opt_design步驟之后我們就能看到XX_opt.dcp 文件.
XX_opt .dcp 所在目錄及文件名:
vitis_pblock_u200/vadd_test_system_hw_link/Hardware/binary_container_1.build/link/vivado/vpl/prj/prj.runs/impl_1 pfm_top_wrapper_opt.dcp
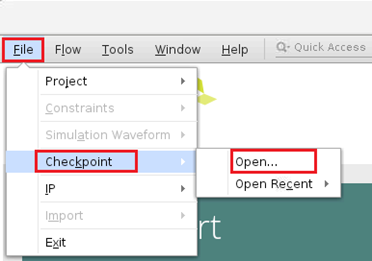
6. 把這個XX_opt.dcp拷貝到另外的目錄,并用Vivado打開這個dcp 文件
7. 查看已有的Pblock。主菜單 Window -> Physical Constraints
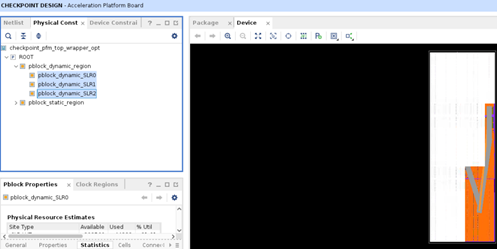
在這個視圖可以看到平臺已經為動態區域在各個SLR中設置了相應的Pblock, 而且需要注意的是,設計中已有的Pblock是有層級關系的
例如:pblock_dynamic_region 包含三個下級pblock:
pblock_dynamic_SLR0,
pblock_dynamic_SLR1,
pblock_dynamic_SLR2,
提醒:不同平臺SLR的數目也可能是不同的. 不同平臺中自帶pblock的名字有差異是正常的. 需要用戶自己觀察.
為Kernel模塊生成的Pblock應該是pblock_dynamic_SLR0 這一級Pblock 的子模塊, 工具支持把同一個Kernel的不同部分放置到多個SLR中,用戶需要保證跨SLR路徑的時序.
8. 為Kernel模塊畫Pblock
在這里嘗試把Kernel 放置在pblock_dynamic_SLR0所屬的中心區域
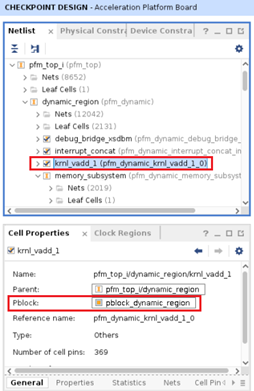
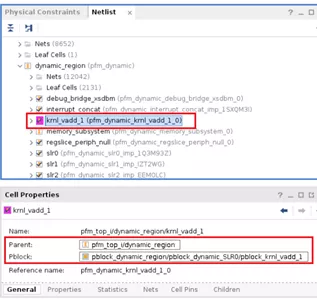
. 在Vivado的Netlist View中選中Kernel 模塊
例子中的模塊名是 pfm_top_i/dynamic_region/krnl_vadd_1
. 可以在Cells properties 窗口看到這個模塊當前所屬的Pblock是pblock_dynamic_region
. 點擊Device 視圖中的"Draw Pblock" 按鈕, 在Device視圖上原有pblock_dynamic_SLR0的范圍內畫一個方框,新畫的Pblock所覆蓋面積要被原Pblock完全包含. 畫完之后還可以選中Pblock微調Pblock的邊界,同時為了不影響原來Pblock的結構,在TCL CONSOLE中用以下命令把新Pblock的Parent Pblock設置成pblock_dynamic_SLR0:
set_property PARENT pblock_dynamic_SLR0 [get_pblocks pblock_krnl_vadd_1]
. 再看Kernel 模塊的Pblock屬性,已經變為pblock_krnl_vadd_1
在TCL CONSOLE中會打印出了畫pblock相應的約束,我們可以將這些約束拷貝到一個新的tcl文件中保存.
(在這里保存到kernel_pblock.tcl)

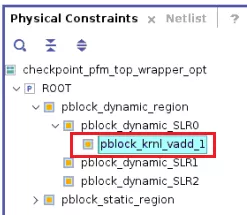
看下更新的Pblock結構,新生成的pblock_krnl_vadd_1 是pblock_dynamic_SLR0的Child Pblock
繼續在TCL CONSOLE執行 place_design 命令完成布局
理論上這一步可以跳過,如果你確信你畫的Pblock沒有問題的話。
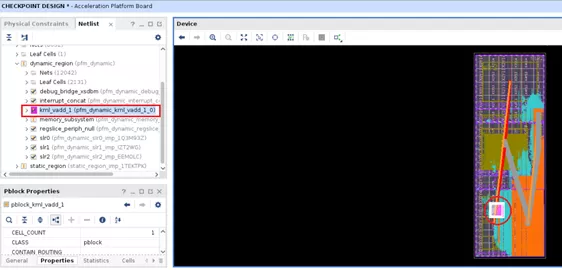
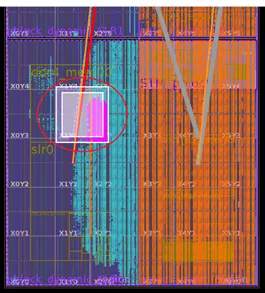
完成place_design之后,可以觀察一下Kernel 的資源在Device 上的實際分布情況
可以看到Kernel的邏輯全部都分布在剛才所畫的Pblock 區域內
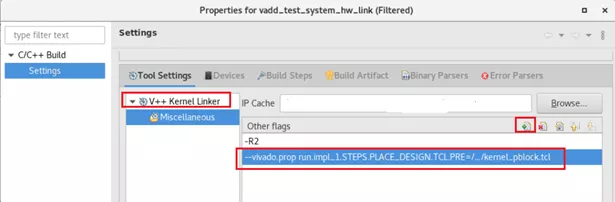
9. 在Vitis的link階段做以下設置,使之前保存的畫Pblock的命令在VPL(Vitis Platform link) 的place_design步驟執行之前生效
--vivado.prop run.impl_1.STEPS.PLACE_DESIGN.TCL.PRE=XX/kernel_pblock.tcl
10. 重新build Vitis 的Hardware flow, 之前加入的命令就會生效。
總結: 這就是一個簡單的為Kernel邏輯創建面積約束(Pblock)的過程, 實際用戶也可以為Kernel的子模塊創建Pblock,這方面工具沒有限制。
審核編輯:劉清
-
開發板
+關注
關注
25文章
4945瀏覽量
97200 -
Kernel
+關注
關注
0文章
48瀏覽量
11139
發布評論請先 登錄
相關推薦
如何在TMS320C6727 DSP上創建基于延遲的音頻效果

如何在Draftsman中創建PCB制造圖紙
linux kernel通過修改鏈接腳本lds文件,如何在esp32的linker.lf文件中實現?
AMD Vitis?設計工具中的Libraries新功能介紹
在Windows 10上創建并運行AMD Vitis?視覺庫示例

Vitis2023.2使用之—— updata to Vitis Unified IDE
Vitis2023.2使用之—— classic Vitis IDE
機器人運動學中的非完整約束與運動模型推導

OpenCL多Kernel并行計算結果討論分析
Vitis 統一軟件平臺文檔
如何在LoRaWAN網關的內置NS創建應用與節點設備

研討會:利用編譯器指令提升AMD Vitis? HLS 設計性能

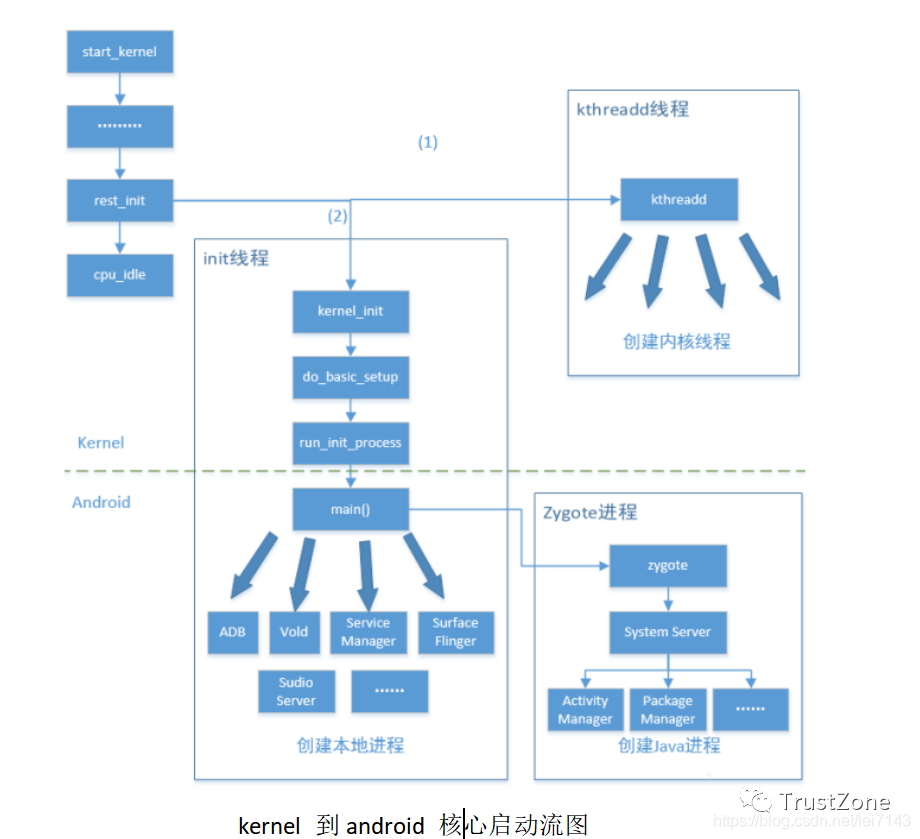
kernel到android核心啟動過程





 工商網監
工商網監
評論