 Can通信協議棧數據流及配置
Can通信協議棧數據流及配置
本系列文章旨在提供一個ETAS RTA-CAR工具鏈的操作指南,使讀者對工具鏈中各部分軟件的功能快速建立初步的理解。同時,通過實際的操作演示,讀者可以學習建立AUTOSAR工程的基本工作流程,并在過程中加強對AUTOSAR概念的理解。
在本視頻中,您將學習:
-
ConfGen時所需的配置文件algo.properties的作用和語法規則
-
Can通信協議棧數據流及配置
algo.properties的作用和語法規則:
在執行ConfGen時,我們可以在Settings/algo.properties這個文件中添加一些規則來更改ConfGen生成的BSW模塊中的一些默認值,該文件中的規則采用逗號分隔的默認列表形式:
manprop_{module}_{specifier} = {parameter}:{default_value}, ...
-
{module}
需要更改默認參數的模塊名稱
-
{specifier}
ALL,可應用于模塊的所有實例。
要更改參數的實例的SHORT-NAME。
-
{parameter}
需要設置的參數名稱。(如果模塊中存在命名沖突,則必須使用參數的完整路徑)
-
{default_value}
用到的新默認值
Can Mailbox Mapping
一些硬件要求Can郵箱按特定順序排列,此時可以通過在algo.properties中設置郵箱映射規則。該語法規則為:
MbSortingPref=direction,~canControllerName,canHandleType
其中direction為郵箱排序的方式,默認情況下郵箱會按照先收再發的順序排列,若在其前面加上~,則郵箱會按照先發再收的順序排列。關于algo.properties的詳細描述可以參考RTA-BSW UserGuide.pdf中的3.5.2節。
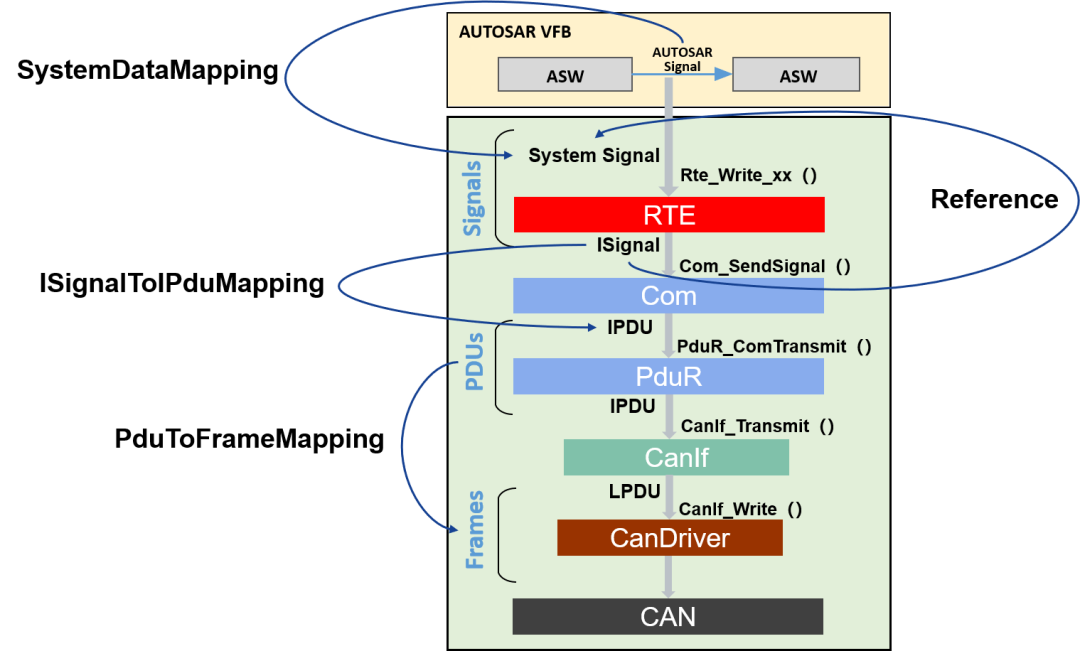
對Can通信協議棧中的發送數據流進行探究
-
將經過SystemdataMapping的系統信號(System Signal)與對應的ISignal進行關聯,這里的System Signal和ISignal以及AUTOSAR Signal是一一對應的,關于如何進行SystemdataMapping,可以觀看本系列的第5期視頻。
-
Com模塊通過其中的Comsignal引用對應的ISignalToIPduMapping,將其封裝為
I-PDU,通過接口PduR_ComTransmit()發送到PduR模塊
-
PduR根據路由表中所指定的I-PDU目標接收模塊,如在此圖中PDUR將接收到的I-PDU經過一定處理后通過接口CanIf_Transmit( )發送到CanIf模塊
-
CanIf將信號以L-PDU的形式通過CanIf_Write( )發送到Can驅動模塊。
最終,實現了基于Can總線的基本數據發送。
審核編輯:湯梓紅
-
通信協議
+關注
關注
28文章
858瀏覽量
40265 -
CAN
+關注
關注
57文章
2718瀏覽量
463377 -
AUTOSAR
+關注
關注
10文章
350瀏覽量
21479
原文標題:ETAS CP AUTOSAR RTA-CAR工具使用教程(7)
文章出處:【微信號:ETASChina,微信公眾號:ETAS易特馳】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
CAN總線通信協議的基礎知識






 工商網監
工商網監
評論