 基于超寬帶傳感器和慣性測量單元融合的定位算法
基于超寬帶傳感器和慣性測量單元融合的定位算法
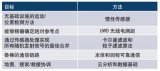
據麥姆斯咨詢報道,為了解決非視距(Non-Line-of-Sight,NLOS)影響下,單一傳感器的室內定位問題,來自深圳大學和國家無線電監測中心的研究人員提出了基于超寬帶(Ultra-Wide Band,UWB)傳感器和慣性測量單元(Inertial Measurement Unit,IMU)融合的定位算法,實現在NLOS場景下的高精度室內定位系統。相關研究成果以論文形式發表于《無線電工程》期刊。
定位系統描述
基于自組織的分布式網絡管理模型如圖1所示,主要由3部分組成:網管服務器、分布式網絡代理(Distributed Network Agent,DNA)和被管設備。
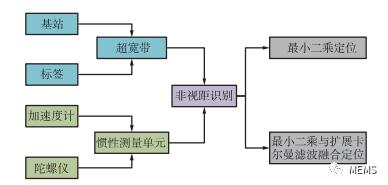
圖1 自組織的分布式網絡管理模型
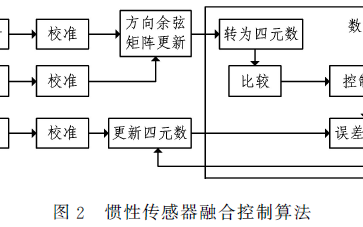
此外,IMU傳感器中的陀螺儀通過姿態矩陣進行姿態解算,加速度計通過二次積分獲得位置信息。UWB通過基站與標簽之間的通信解算出位置信息。通過當前位置和UWB測得的距離信息采用支持向量機(Support Vector Machine,SVM)進行NLOS信號的識別分類。
NLOS信號的檢測
雖然UWB技術具有較強的抗干擾能力和抗多徑衰弱能力,但是在NLOS情況下,UWB信號的測距定位能力將大大降低。因此在進行UWB定位時,要進行NLOS的識別。在雙向測距(Two-way Ranging,TWR)的解算過程中,脈沖信號一共傳遞了3次。當出現障礙物遮擋時,信號的傳輸會多次受到NLOS的影響,相比于前一時刻的信號傳播時間會出現較大的跳變。因此,研究人員提出使用機器學習的方式,利用支持向量機(Support Vector Machine,SVM)對實際場景中的NLOS和LOS情況下的距離測量值進行訓練,得到符合對應應用場景的分辨閾值。由于移動障礙物可能會對UWB系統的NLOS測距結果產生規律性的影響,因此通過設置障礙物的位置模擬NLOS場景,并研究障礙物位置與NLOS檢測之間的關系。NLOS/LOS樣點采集模型如圖2所示。
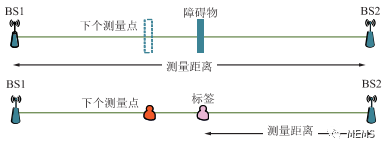
圖2 NLOS/LOS樣點采集模型
IMU和UWB融合定位仿真實驗
為了驗證所提出的算法的性能,研究人員通過仿真實驗進行模擬。在不同觀測噪聲下,通過最小二乘法(Least Squares Method,LS)和LS-擴展卡爾曼濾波(EKF)算法的定位軌跡如圖3(a)所示。在同等觀測噪聲下,UWB和IMU經過EKF濾波過后的定位軌跡要比只經過LS定位算法的定位軌跡數據抖動更小,軌跡更加平滑。且觀測噪聲也會對定位結果有較大影響。圖3(b)顯示了2種算法的誤差變化趨勢。在觀測噪聲R=0.1時,經過LS算法定位的軌跡誤差在0.1-1.4m抖動,經過EKF濾波后定位誤差下降并逐漸保持穩定在0.2-0.4m。在觀測噪聲R=0.01時,LS-EKF算法的誤差明顯要比LS算法平滑得多,且定位誤差更小。圖3(c)是2種算法對應的誤差累計分布函數(Cumulative Distribution Function,CDF)圖,在觀測噪聲R=0.1時,LS和LS-EKF算法在仿真的數據范圍內的最大誤差分別為1.3m和0.85m;在觀測噪聲R=0.01時,LS和LS-EKF算法在仿真的數據范圍內的最大誤差分別為0.3m和0.2m。
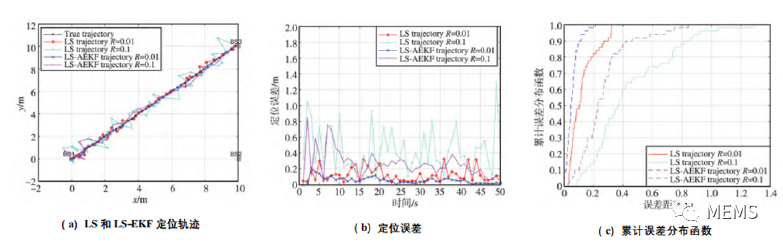
圖3 LS和LS-EKF定位算法
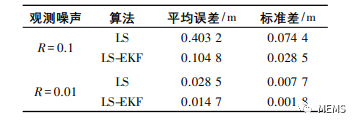
LS和LS-EKF算法平均誤差和標準差如表1所示,在觀測噪聲R=0.1時,LS和LS-EKF算法平均誤差為0.4032m和0.1048m,誤差的標準差大小為0.0744m和0.0285m。在觀測噪聲R=0.01時,LS和LS-EKF算法平均誤差為0.0285m和0.0147m,誤差的標準差大小為0.0077m和0.0018m。在觀測噪聲分別為R=0.1和R=0.01時,相較于LS算法,LS-EKF算法的定位精度分別提高了74%和48%。因此,所提出的算法能很好地識別和緩解NLOS帶來的定位誤差。
表1 LS和LS-EKF算法平均誤差和標準差
-
傳感器
+關注
關注
2548文章
50689瀏覽量
752030 -
服務器
+關注
關注
12文章
9021瀏覽量
85186 -
超寬帶
+關注
關注
1文章
194瀏覽量
23568
原文標題:非視距環境下超寬帶傳感器和慣性測量單元融合的定位系統
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
尋求慣性測量單元傳感器ADIS16365的PCB接口封裝
基于MEMS的 FIS1100慣性測量裝置IC 及融合軟件
uwb超寬帶定位原理全面解析
UWB超寬帶定位技術概念
MEMS慣性傳感器輕松解決應急救援定位問題
超寬帶無線傳感器網絡MAC協議
超寬帶定位有哪幾種常用的算法(三種方法詳解)
MEMS慣性傳感器到云傳感器融合系統的定位系統
基于慣性傳感器融合控制算法的手語識別方案






 工商網監
工商網監
評論