 AxRobot機器手臂示教編程教學
AxRobot機器手臂示教編程教學
亞信電子AX58200 AxRobot支持離線與線上機器手臂示教編程功能。這個視頻介紹AX58200 AxRobot EtherCAT從站七軸助力控制機器手臂解決方案的線上示教編程功能。
AX58200 AxRobot機器手臂解決方案,利用亞信AX58200 EtherCAT從站馬達驅動關節模塊化設計,有效地減少每個機器手臂關節中馬達驅動板所需占用的空間大小,降低機器手臂關節硬件設計成本。另外,使用EtherCAT菊花鏈(Daisy-Chain)拓撲連接技術,進行機器手臂關節間的網絡通信,可以簡單地使用網絡線從第一軸關節一直串接到第七軸關節,大大地簡化機器手臂關節中內部線路配置的復雜度,從而降低機器手臂設備維護的成本與難度。
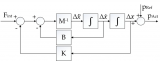
一般協作型機器手臂透過裝置力量傳感器,來獲取外界接觸力量的資訊,進而實現智能工廠自動化所需的人機協作功能。AxRobot助力控制機器手臂解決方案,無需額外安裝價格昂貴的力量傳感器,透過內置的馬達助力控制器功能,即可偵測外部突發碰撞事件,緊急停止機器手臂的運作并發出錯誤警報信息,以確保在人與機器協作過程中操作人員的安全。
亞信電子可提供AxRobot EtherCAT七軸助力控制機器手臂開發套件,方便客戶進行AxRobot七軸助力控制機器手臂軟件控制功能評估。另外,亞信電子可依據客戶產品設計的需求,提供AxRobot EtherCAT七軸助力控制機器手臂的開發設計服務。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
編程
+關注
關注
88文章
3595瀏覽量
93604 -
亞信電子
+關注
關注
0文章
26瀏覽量
10577 -
工業自動化
+關注
關注
17文章
2306瀏覽量
67181 -
機器手臂
+關注
關注
1文章
18瀏覽量
11566
發布評論請先 登錄
相關推薦
歐姆龍協作機器人TM25S可使用多種方法進行編程
按鈕,即可完成位置示教。 ? 圖形化編程 TM25S可通過使用軟件工具TMflow在屏幕上繪制流程圖,可以輕松描述機器人的動作和處理邏輯。TMflow還可以對協作

訊維分布式可視化醫療示教系統,開啟智慧醫療,遠程示教全新應用
醫學的發展改變了醫生醫治病人的方式,視頻通訊系統則使醫生共享信息的方式發生了改變。隨著國家對醫療衛生人才培養力度的加大,手術示教和醫療觀摩系統逐步成為近年來醫院信息化建設的一個熱點。


什么是拖動示教?機器人拖動示教方式分析
隨著拖動示教在協作機器人、并聯機器人上的應用,將調試技術趨向快速、簡便的方向發展,滿足生產企業應用機器人進行及時、高效的生產需求,以及在工業

基于導納控制的機器人拖動示教原理和實現步驟
? ? ? 基于導納控制的機器人拖動示教是一種常用的機器人控制策略,它允許人與機器人直接互動,實現自然、直觀的控制。在導納控制中,
荊州學院聯合創龍教儀建設DSP教學實驗箱案例分享
工程、通信工程、物聯網工程、自動化、軟件工程6個本科專業及計算機應用技術、計算機網絡技術2個專科專業。
2、培訓情況
創龍教儀聯合荊州學院-信息工程學院共同建設為基于接口相關教學實驗室。
為了適應技術
發表于 09-12 14:29

工業機器人常用的編程方式
機器人完成特定的任務。編程可以手動完成,也可以通過計算機輔助設計(CAD)軟件自動生成。編程方式的選擇取決于任務的復雜性、機器人的類型、以及所需的靈活性和效率。 1. 手動
工業機器人的四種編程(示教編程、離線編程、自增強現實編程主編程)剖析!
當前機器人廣泛應用于焊接、裝配、搬運、噴漆及打磨等領域,任務的復雜程度不斷增加,而用戶對產品的質量、效率的追求越來越高。在這種形式下,機器人的編程方式、編程效率和質量顯得越來越重要。降

基于RK3568核心板的工業示教器解決方案
機器人作為現代制造業中的重要一環,在生產效率、產品質量和勞動安全等方面帶來了巨大的提升,給企業帶來了巨大的競爭優勢。但機器人的應用存在開發難、安全性差等問題。“示教器”可用豐富的組件解

基于導納控制的機器人拖動示教原理和實現步驟
基于導納控制的機器人拖動示教是一種常用的機器人控制策略,它允許人與機器人直接互動,實現自然、直觀的控制。在導納控制中,





 工商網監
工商網監
評論