 構建一個手套控制機械手臂
構建一個手套控制機械手臂
該項目使用預算項目和 DIY 零件來創建一個功能齊全的機器人手,可以通過帶有柔性傳感器的手套進行控制。這是一個介紹生物力學工程和設計世界的項目。從泡沫和繩子的基本構建塊開始,您將探索物理力學如何與電子部件相結合,形成一個引人注目的項目。
設計
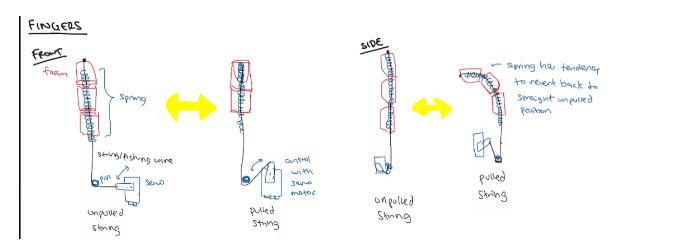
下圖是機械手和手套控制器如何工作的基本圖紙。這些圖片對最終產品并不準確,但提供了項目背后機制的基礎和解釋。
手工
首先,用泡沫、彈簧、膠帶和繩子制作手指。每個手指由三個泡沫底座(兩個用于拇指)和一個嵌入其中心的彈簧組成。繩子被熱粘在頂部泡沫件上,并在泡沫件內向下引導。最后,膠帶用于保護和覆蓋泡沫。我建議不要像我那樣使用絕緣泡沫,因為它很難切割。
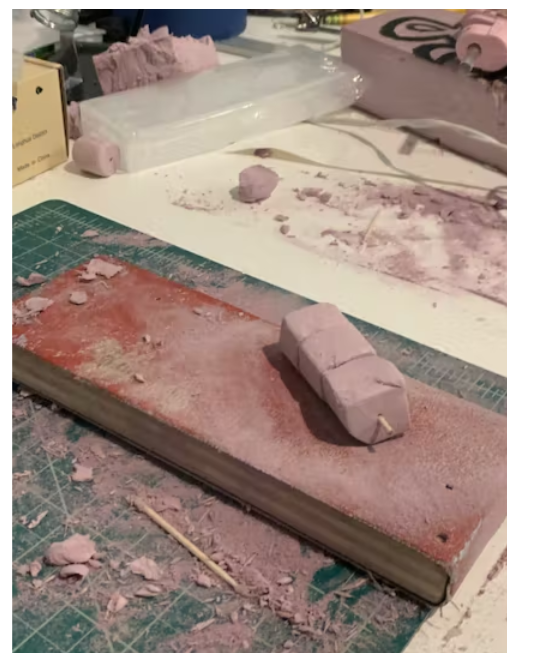
從手指根部下方伸出一部分彈簧非常重要。起初我所有的手指都沒有這個,之后我將另一個彈簧焊接到底部以增加長度。另一種方法是使用牙簽作為底座,但這樣您的手就無法在手掌上彎曲。
接下來構建手掌和手臂底座。我沒有太多關于這個過程的文檔,但這比較簡單。對于我的手,我雕刻了一個手掌狀的形狀來握住我所有的手指。在手掌頂部創建孔以固定手指手臂底座至少將 5 個伺服器和一個 Arduino Uno 固定在一起。我的項目尺寸為 8x2.5x.5 英寸。確保琴弦能夠從底座上拉出。使用手掌上的訂書釘作為支架將琴弦引導至伺服電機。創建凹痕并粘合伺服電機。
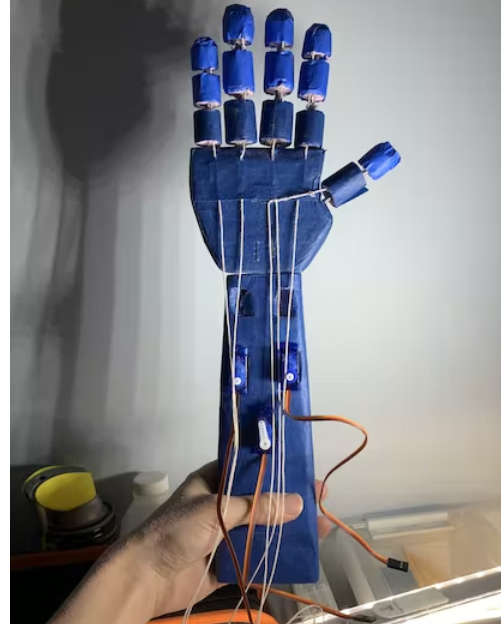
將琴弦穿過伺服電機臂,并在拉緊時將其熱粘。將 Arduino Uno 安裝到手臂底部,并將面包板連接到背面。用橡皮筋/束線帶整理電線,并將所有伺服電機連接到面包板上的電源導軌。最后,將伺服電機上的信號線連接到 Arduino 板上的數字引腳。使用 4AA 電池組僅為伺服電機供電。手的接線和構造現在已經完成。現在可以對 Arduino Uno 進行編程以控制伺服電機。

手套結構
手套控制器最重要的部分是彎曲傳感器。與其花 100 美元購買 5 個傳感器,不如自己動手做。這是需要使用紙和鉛筆、柔性塑料和膠帶的地方。
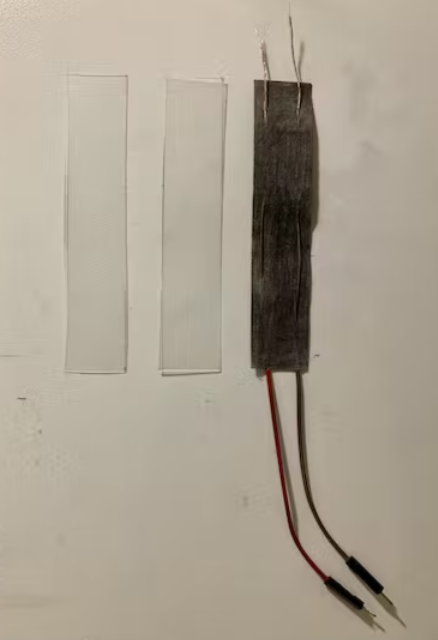
接下來,將傳感器粘在備用手套上。

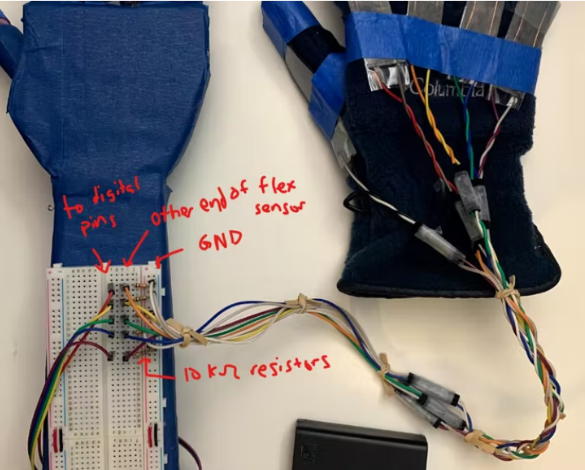
保持井井有條的布線很重要,因為有很多跳線。至少有 10 根電線需要連接到面包板上。將電線扭在一起,以防止它們到處蔓延。根據下圖連接柔性傳感器。我使用了 5 個 10kOhm 電阻器,但也可以使用其他選項。請注意,此電源軌直接從 Arduino 引腳接收電源,而不是 6V 電池組。
編碼
在提供的編碼部分,重要的是要意識到參數會因每個柔性傳感器和伺服電機而異。為了清楚地組織值,我包含了 flexTest() 函數來測試 flex 傳感器的值。
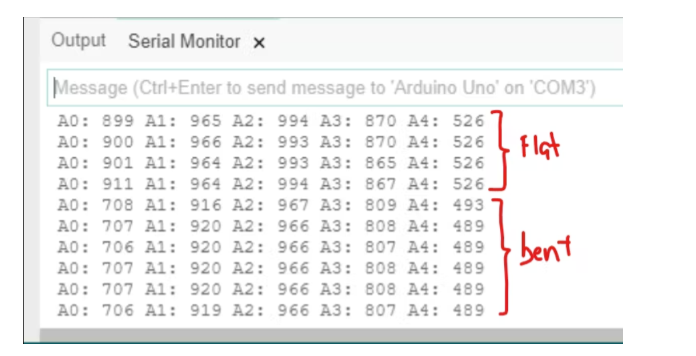
對于伺服電機參數,我用伺服電機測試了每個手指的完全彎曲并減少了旋轉量,以確保手指彼此不會過度重疊。
測試程序并根據需要更改參數,以便使用手套獲得最佳控制。到這一步,項目就完成了!
結論
最終這個項目工作正常,但它沒有我想象中的那么精致,不過考慮到大部分都是手工制作的,也確實可以完成它的工作。3D 打印或購買柔性傳感器等替代選項可能會改善體驗,但如此一來成本會很高。
擴展
該項目的擴展可能包括使用 EMG 傳感器進行肌肉控制。使手套控制器無線化是可能的。功能性手腕和肘部運動也將是一個挑戰。
-
控制器
+關注
關注
112文章
16203瀏覽量
177407 -
機器人手
+關注
關注
0文章
3瀏覽量
2604 -
柔性傳感器
+關注
關注
1文章
85瀏覽量
3876
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論