 一類新的仿生3D相機系統
一類新的仿生3D相機系統
日前,來自美國加州大學洛杉磯分校的生物工程師開發出了一類新的仿生3D相機系統,可以模仿蒼蠅的多視圖視覺和蝙蝠的自然聲吶感應,從而產生具有非凡深度范圍的多維成像,還可以掃描盲點。在計算圖像處理支持下,該相機可破譯隱藏在角落或其他物品后面的物體的大小和形狀。 這一技術能集成到自動駕駛汽車或醫學成像工具中,其傳感能力遠遠超出當今最先進水平。這項研究成果發表在《自然·通訊》上。
蝙蝠可通過回聲定位或聲吶的形式將周圍環境的畫面形象化;昆蟲的復眼則由數百到數萬個單獨的視覺單元組成,使其從多條視線看到同一事物成為可能。受到在蒼蠅和蝙蝠中發現的這兩種自然現象的啟發,加州大學洛杉磯分校研究團隊設計出一種高性能3D相機系統,該系統具有先進的功能,既能利用這些優勢,又能克服自然界的缺點。
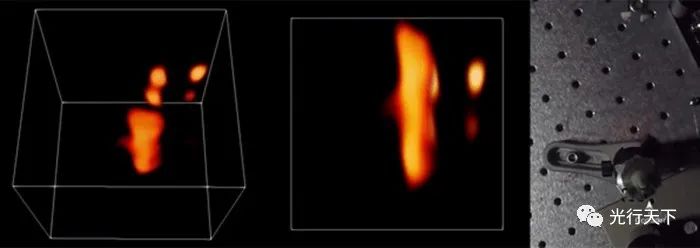
研究人員開發了一種全新的計算成像框架,首次通過簡單的光學器件和少量傳感器獲得寬而深的全景視圖。該框架被稱為“緊湊型光場攝影”(CLIP),使相機系統能以擴展的深度范圍“看到”物體周圍。在實驗中,研究人員證明該系統可“看到”傳統3D相機無法發現的隱藏物體。 研究人員還使用了LiDAR(光檢測和測距)技術,其中激光掃描周圍環境以創建該區域的3D地圖。沒有CLIP的傳統LiDAR能拍攝場景的高分辨率快照,但會像人眼一樣錯過隱藏的物體。 該陣列使用7個帶CLIP的LiDAR攝像頭,拍攝場景的低分辨率圖像,處理單個攝像頭看到的內容,然后在高分辨率3D成像中重建組合場景。研究人員展示了相機系統可對具有多個對象的復雜3D場景進行成像,這些對象都設置在不同的距離處。
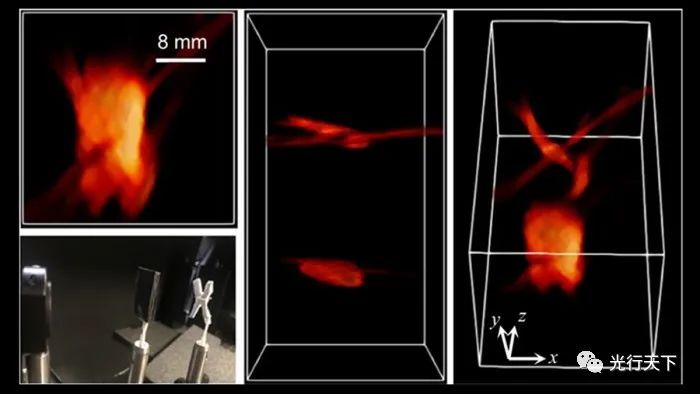
以不同視角呈現字母“X”的重構3D圖像
研究人員稱,CLIP幫助相機陣列以類似的方式理解隱藏的內容。結合激光雷達,該系統能夠實現蝙蝠回聲定位效果,因此可通過光線反射回攝像頭所需的時間來感知隱藏的物體。
審核編輯 :李倩
-
仿生
+關注
關注
1文章
33瀏覽量
8259 -
自動駕駛
+關注
關注
783文章
13694瀏覽量
166168 -
3D相機
+關注
關注
0文章
106瀏覽量
8044
原文標題:?多維成像|生物工程師開發出仿生超級3D相機
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦


奧比中光3D相機打造高質量、低成本的3D動作捕捉與3D動畫內容生成方案
OpenCV攜奧比中光3D相機亮相CVPR 2024

奧比中光正式發布全新Gemini 330系列雙目3D相機

奧比中光攜多款3D相機深度參與國內3D視覺最高規格會議

Stability AI推出Stable Video 3D模型,可制作多視角3D視頻
一類短路和二類短路的區別
高精度彩色3D相機:開啟嶄新的彩色3D成像時代

友思特分享 | 高精度彩色3D相機:開啟嶄新的彩色3D成像時代








 工商網監
工商網監
評論