 機器人里的高效伺服系統
機器人里的高效伺服系統
電子發燒友網報道(文/李寧遠)在機器人行業里,伺服驅動是一個老生常談的話題了。隨著工業4.0的加速更迭,機器人的伺服驅動也隨之升級。現在的機器人系統既要求驅動系統能控制更多的軸數,還要能實現更多智能化的功能。
在多軸工業機器人運行中的每個節點上,它必須在三個維度上使用不同大小的力才能完成設定的搬運等任務。機器人中的電機能夠在精確的點提供可變速度和扭矩,控制器使用它們沿著不同的軸協調運動,從而實現精確的定位。在機器人完成搬運任務后,電機會減小扭矩,同時將機械臂返回到其初始位置。
這種高效伺服系統由高性能控制信號處理、精確感應反饋、電源以及智能電機驅動一起組成,提供復雜的接近瞬時響應的精確速度和扭矩控制。
高速實時伺服環路控制—控制信號處理與感應反饋
伺服環路實現高速數字化實時控制的基礎離不開微電子制造工藝的升級。以最常見的三相電運行的機器人電機為例,PWM三相逆變器生成高頻脈沖電壓波形,以獨立相將這些波形輸出到電機的三相繞組中。在這三個功率信號中,電機負載的變化會影響感應、數字化并發送到數字處理器的電流反饋。再由數字處理器進行高速信號處理算法決定輸出。
這里不僅要求數字處理器的高性能,對電源也有嚴格的設計要求。我們先看處理器部分,內核運算速度必須要跟上自動化升級的腳步,這個現在已經不再是問題。一些運控芯片將電機控制所必需的A/D轉換器、位置/速度檢測倍頻計數器、PWM發生器等等與處理器內核集成于一體,使得伺服控制回路采樣時間大大縮短,由單一芯片實現了自動加減速控制,齒輪同步控制,位置、速度、電流三環的數字化補償控制。
控制算法如速度前饋、加速度前饋、低通濾波、凹陷濾波也在單芯片上實現。處理器的選取這里不再贅述,在此前的文章中已經對各類機器人應用做過分析,不管是低成本應用,還是對編程和算法有較高要求的應用目前市面上已經有很多選擇,優勢各異。
不只是電流反饋,其他的感應數據也會送到控制器中來跟蹤系統電壓和溫度的變化。高分辨率的電流和電壓檢測反饋一直是電機控制里的難題。同時檢測所有分流器/霍爾傳感器/磁傳感器的反饋無疑是最好的,不過這樣對設計有很高的要求,而且計算能力要跟得上。
同時為了避免信號的丟失和干擾,在靠近傳感器的邊緣對信號進行數字化,隨著采樣率上升,信號漂移帶來的數據錯誤也不少,設計需要通過感應和算法調整對這些變化進行補償。這樣伺服系統才能在各種條件下保持穩定。
可靠精準伺服驅動—電源與智能電機驅動
具有穩定高分辨率控制的超高速開關功能的電源為可靠精準的伺服控制供電,目前有很多廠商都有采用高頻材料的集成式電源模塊,設計起來容易了很多。
開關模式電源在基于控制器的閉環電源拓撲中運行,兩種常用的電源開關是功率MOSFET和IGBT。柵極驅動器在采用開關模式電源的系統中很常見,開關模式電源通過對ON/OFF狀態的控制在這些開關的柵極上進行調節電壓和電流。
在開關模式電源和三相逆變器的設計上,各類高性能的智能柵極驅動器、內置FET的驅動器、集成控制功能的驅動器層出不窮。內置FET和電流采樣功能的集成設計,可以大幅減少外部元器件的使用,PWM和使能、上下管、霍爾信號輸入邏輯配置大大增加了設計的靈活性,既簡化了開發流程,又提升了電源效率。
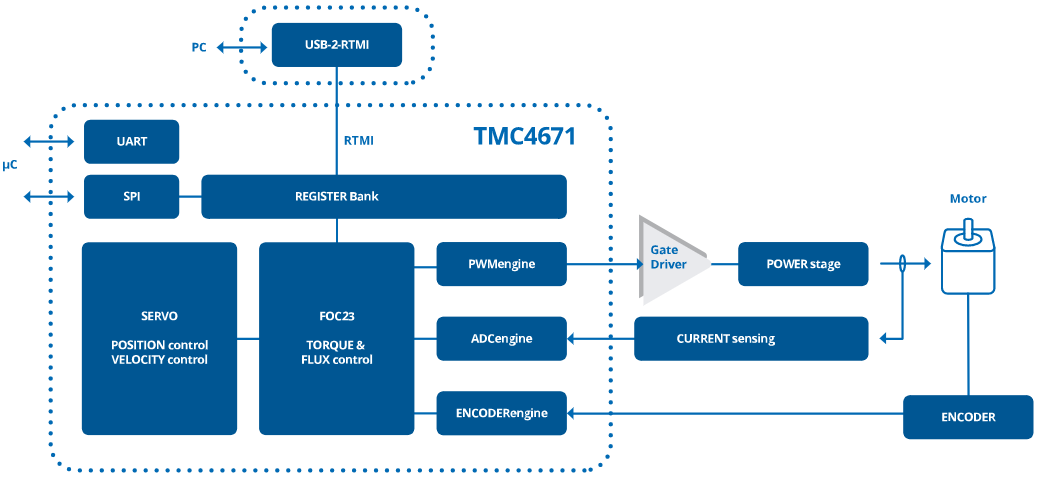
伺服驅動IC也將集成度發揮到最大,完全集成的伺服驅動IC可以大大縮短伺服系統出色動態性能的開發時間。預驅、傳感、保護電路和電源橋集成到一個封裝中可以最大限度地降低整體功耗和系統成本。這里列的是Trinamic(ADI)的完全集成式的伺服驅動IC框圖,所有控制功能都在硬件中實現,集成ADC、位置傳感器接口、位置內插器,功能齊全適用于各種伺服應用。
小結
高效伺服系統里高性能控制信號處理、精確感應反饋、電源以及智能電機驅動缺一不可,高性能器件的相互配合才能給機器人實時提供在運動中瞬間響應的精確速度與扭矩控制。在更高的性能之余,各個模塊的高集成度也提供了更低的成本和更高的工作效率。
在多軸工業機器人運行中的每個節點上,它必須在三個維度上使用不同大小的力才能完成設定的搬運等任務。機器人中的電機能夠在精確的點提供可變速度和扭矩,控制器使用它們沿著不同的軸協調運動,從而實現精確的定位。在機器人完成搬運任務后,電機會減小扭矩,同時將機械臂返回到其初始位置。
這種高效伺服系統由高性能控制信號處理、精確感應反饋、電源以及智能電機驅動一起組成,提供復雜的接近瞬時響應的精確速度和扭矩控制。
高速實時伺服環路控制—控制信號處理與感應反饋
伺服環路實現高速數字化實時控制的基礎離不開微電子制造工藝的升級。以最常見的三相電運行的機器人電機為例,PWM三相逆變器生成高頻脈沖電壓波形,以獨立相將這些波形輸出到電機的三相繞組中。在這三個功率信號中,電機負載的變化會影響感應、數字化并發送到數字處理器的電流反饋。再由數字處理器進行高速信號處理算法決定輸出。
這里不僅要求數字處理器的高性能,對電源也有嚴格的設計要求。我們先看處理器部分,內核運算速度必須要跟上自動化升級的腳步,這個現在已經不再是問題。一些運控芯片將電機控制所必需的A/D轉換器、位置/速度檢測倍頻計數器、PWM發生器等等與處理器內核集成于一體,使得伺服控制回路采樣時間大大縮短,由單一芯片實現了自動加減速控制,齒輪同步控制,位置、速度、電流三環的數字化補償控制。
控制算法如速度前饋、加速度前饋、低通濾波、凹陷濾波也在單芯片上實現。處理器的選取這里不再贅述,在此前的文章中已經對各類機器人應用做過分析,不管是低成本應用,還是對編程和算法有較高要求的應用目前市面上已經有很多選擇,優勢各異。
不只是電流反饋,其他的感應數據也會送到控制器中來跟蹤系統電壓和溫度的變化。高分辨率的電流和電壓檢測反饋一直是電機控制里的難題。同時檢測所有分流器/霍爾傳感器/磁傳感器的反饋無疑是最好的,不過這樣對設計有很高的要求,而且計算能力要跟得上。
同時為了避免信號的丟失和干擾,在靠近傳感器的邊緣對信號進行數字化,隨著采樣率上升,信號漂移帶來的數據錯誤也不少,設計需要通過感應和算法調整對這些變化進行補償。這樣伺服系統才能在各種條件下保持穩定。
可靠精準伺服驅動—電源與智能電機驅動
具有穩定高分辨率控制的超高速開關功能的電源為可靠精準的伺服控制供電,目前有很多廠商都有采用高頻材料的集成式電源模塊,設計起來容易了很多。
開關模式電源在基于控制器的閉環電源拓撲中運行,兩種常用的電源開關是功率MOSFET和IGBT。柵極驅動器在采用開關模式電源的系統中很常見,開關模式電源通過對ON/OFF狀態的控制在這些開關的柵極上進行調節電壓和電流。
在開關模式電源和三相逆變器的設計上,各類高性能的智能柵極驅動器、內置FET的驅動器、集成控制功能的驅動器層出不窮。內置FET和電流采樣功能的集成設計,可以大幅減少外部元器件的使用,PWM和使能、上下管、霍爾信號輸入邏輯配置大大增加了設計的靈活性,既簡化了開發流程,又提升了電源效率。
伺服驅動IC也將集成度發揮到最大,完全集成的伺服驅動IC可以大大縮短伺服系統出色動態性能的開發時間。預驅、傳感、保護電路和電源橋集成到一個封裝中可以最大限度地降低整體功耗和系統成本。這里列的是Trinamic(ADI)的完全集成式的伺服驅動IC框圖,所有控制功能都在硬件中實現,集成ADC、位置傳感器接口、位置內插器,功能齊全適用于各種伺服應用。
小結
高效伺服系統里高性能控制信號處理、精確感應反饋、電源以及智能電機驅動缺一不可,高性能器件的相互配合才能給機器人實時提供在運動中瞬間響應的精確速度與扭矩控制。在更高的性能之余,各個模塊的高集成度也提供了更低的成本和更高的工作效率。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28205瀏覽量
206530 -
伺服系統
+關注
關注
14文章
561瀏覽量
39179
發布評論請先 登錄
相關推薦
伺服電機在機器人中的應用有哪些
伺服電機作為現代工業自動化領域的核心組件,其精確控制和高效性能在機器人技術中扮演著至關重要的角色。 伺服電機的工作原理 伺服電機是一種能夠將

伺服控制機器人的控制方式有哪些
伺服控制機器人是一種高度精確的自動化設備,它能夠執行復雜的任務,如精確定位、重復運動和力控制。伺服控制系統是機器人技術中的核心部分,它負責接
伺服系統基本概念和與變頻的關系
伺服系統的基本概念是準確、精確、快速定位。這一概念貫穿于伺服系統的設計理念和運行機制中。為了實現這一目標,伺服系統采用了多種先進的控制策略和技術手段。其中,變頻技術是伺服控制的一個必不
影響伺服系統穩態速度精度的因素
伺服系統是一種高精度、高響應速度的控制系統,廣泛應用于工業自動化、機器人、航空航天等領域。伺服系統的性能直接影響到設備的運行精度和穩定性。 伺服
AMD Kria? KR 260套件+ROS 2快速開發機器人解決方案
伺服系統,其中不僅包含電機,還包含微控制器和網絡功能。雖然這使得機器人應用所需的復雜電機驅動成為可能,但這也意味著每個伺服系統都有幾個不同的驅動和控制機制。通常,當使用這種復雜的伺服和

開環閉環半閉環伺服系統的區別
伺服系統是現代工業自動化和精密控制領域中不可或缺的一部分。根據控制方式的不同,伺服系統可以分為開環伺服系統、閉環伺服系統和半閉環伺服系統。這
數控機床對伺服系統的要求有哪些?
引言 數控機床是一種采用數字程序控制的機床,具有高精度、高效率、高自動化程度等特點。伺服系統作為數控機床的核心部分,主要負責接收數控系統的指令信號,控制機床各軸的移動和定位,以實現對工件的加工。因此
伺服系統與步進系統的區別
在工業自動化和精密控制領域,伺服系統和步進系統都是常見的控制系統,它們各自具有獨特的工作原理和應用場景。本文旨在深入探討伺服系統與步進系統之
交流伺服系統的組成和應用
在現代工業自動化和精密控制領域中,交流伺服系統扮演著至關重要的角色。它以其高精度、高穩定性、快速響應和靈活性等優點,廣泛應用于各種工業設備、機器人、數控機床等領域。本文將詳細闡述交流伺服系統的基本概念、工作原理、組成部分、應用領
伺服系統的分類及主要特點
伺服系統,作為工業自動化領域的重要組成部分,其性能直接影響著整個生產線的效率和精度。隨著科技的不斷發展,伺服系統也在不斷地優化和升級,以滿足日益增長的市場需求。本文將詳細探討伺服系統的分類及主要特點,以期為相關領域的研究和實
伺服系統的結構組成及應用場景
伺服系統,作為自動化和精密控制領域的關鍵組成部分,廣泛應用于各類工業和科研領域。其高精度、高響應速度以及優良的穩定性使得伺服系統在現代工業中扮演著舉足輕重的角色。本文將對伺服系統的結構組成進行詳細介紹,并對
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
和增強系統處理圖像的實時性,本文提出了一種伊瑟特的六自由度機器人視覺伺服控制系統,將攝像頭集成到基于 Zynq的伊瑟特主站上,提高了視覺伺服
發表于 05-29 16:17
LabVIEW的六軸工業機器人運動控制系統
環境中,對機器人進行了正逆運動學仿真測試。接著,對單軸和多軸伺服系統進行了控制測試,最終實現了機器人的軌跡規劃實體控制。
在整個項目中,LabVIEW的功能被充分利用,特別是在算法實現、數據處理方面
發表于 12-21 20:03





 工商網監
工商網監
評論