") CAN總線的位定時
CAN總線的位定時
對一般的開發(fā)者來說,CAN總線的位定時概念并不常見。不過,如果給整車廠做過零部件,經(jīng)受過他們的CAN通信測試考驗,您可能就知道,這也是比較重要的一個知識點。
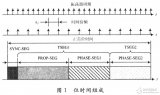
CAN報文由七個不同的場/段組成。
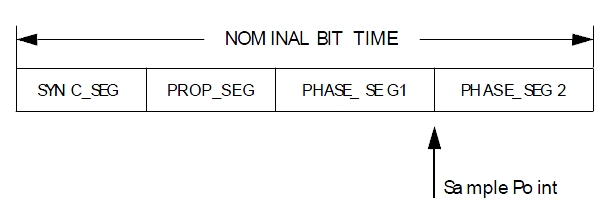
一個位,由同步段+傳播段+相位緩沖段1+相位緩沖段2組成。
這四個段的時間均為基本時間單位“時間份額”的若干倍,時間份額Tq派生于振蕩器周期,可以由振蕩器進行分頻。
由這張圖可以看出,在相位緩沖段1和相位緩沖段2的交接處,藏著一個“采樣點”,或者說“采樣時刻”,這也是CAN通信測試中比較重要的一個測試項。
下面這張圖,是一個CAN通信需求規(guī)范中的位定時要求。
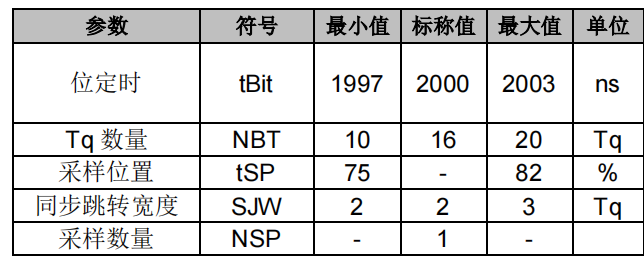
在實際的編程開發(fā)工作中,需要根據(jù)這個位定時規(guī)范,對照MCU中CAN模塊的寄存器特點,對寄存器進行針對性設置。
比如飛思卡爾微控制器中的MSCAN模塊,其位定時寄存器如下所示:
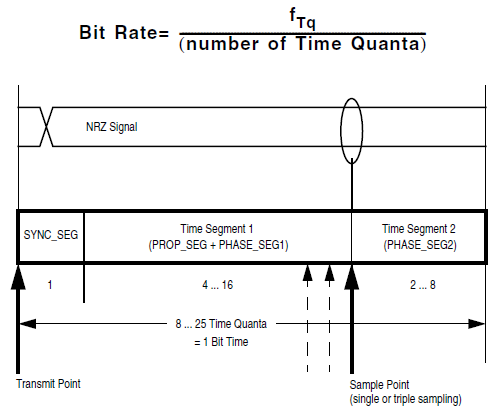
在這款CAN控制器中,把CAN的位分成了三段,同步段、段1和段2。跟CAN2.0協(xié)議中定義的“同步段+傳播段+相位緩沖段1+相位緩沖段2”進行對比,便可以發(fā)現(xiàn),MSCAN中的段1即CAN2.0協(xié)議中的“傳播段+相位緩沖段1”。
根據(jù)規(guī)范要求,一個8us的CAN比特位包含16個Tq,采樣位置在該bit位75%的時刻,所以,可以將Time Segment1 設為 11,Time Segment2 設為 4,這樣,既能保證包含16個Tq(1 + Time Segment1 + Time Segment2 = 16),又可以保證采樣時刻=(1 + Time Segment1)/16=75%。
審核編輯:湯梓紅
-
CAN
+關注
關注
57文章
2717瀏覽量
463377 -
總線
+關注
關注
10文章
2867瀏覽量
87988 -
位定時
+關注
關注
0文章
3瀏覽量
5740
發(fā)布評論請先 登錄
相關推薦
【CAN總線知識】CAN信號中的位定時段的規(guī)格


CAN總線工作原理及數(shù)據(jù)鏈路層、延時分析
CAN協(xié)議中的位定時與位同步分別是什么?
CAN 總線位定時參數(shù)的確定
優(yōu)化位定時提高CAN網(wǎng)絡性能的研究
CAN總線的位定時和同步機制詳細分析和探討
CAN信號中位定時段的規(guī)格

CAN總線通信報文驗收濾波、位定時與同步詳解
CAN總線基礎的詳細資料概述
CAN總線信號傳輸位定時與位同步是如何實現(xiàn)的
基于獨立通信控制器SJA1000實現(xiàn)對CAN總線位定時參數(shù)進行研究






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論